一种机器人运动特征实时识别方法
本发明属于工业生产/设备运维/人工智能领域,涉及机器人运动控制,尤其涉及一种机器人运动特征实时识别方法。
背景技术:
1、目前机器人运动过程主要依靠信号值及定义的机器人动作进行工作。通过plc发送给机器人不同的信号,控制机器人做不同的工艺,如发送信号控制机器人循迹到对应点位;发送信号控制机器人进行焊接;发送信号控制机器人等待等。该过程中,机器人的运动特征判断主要依据plc点位控制。整个过程是通过plc控制信号,给机器人发对应的工作指令,实现机器人的运动过程控制。过程中,机器人处于何种特征只能通过现场观察或在pda上进行查看,无法实现远程查看及统计的功能。
2、机器人运动特征识别在机器人应用、生产线设备监测、设备故障诊断等方面具有重要价值。能够直接反应机器人的实时运动特征并监测设备开动率等情况。现有技术方案查看机器人实时运动特征时,需要到机器人示教器或者pda上进行状态查看,虽然能够实现机器人运动状态的查看,但不方便进行特征识别。
技术实现思路
1、为了至少解决现有技术中存在的技术问题之一,本发明提供一种机器人运动特征实时识别方法,本发明通过实时采集机器人运动过程中本体轴和工具轴的运动轴速度,通过数据清洗和数据训练,采用长短期神经网络识别的方法,通过对历史数据学习分析出机器人的运动特征数据矩阵,并在后续的实时数据输入时能够有效预判机器人运动特征。该方法直接采集机器人的原始数据,数据准确、实时性高,能够达到直观的反应机器人的各个运动特征并达到精准识别的目的。
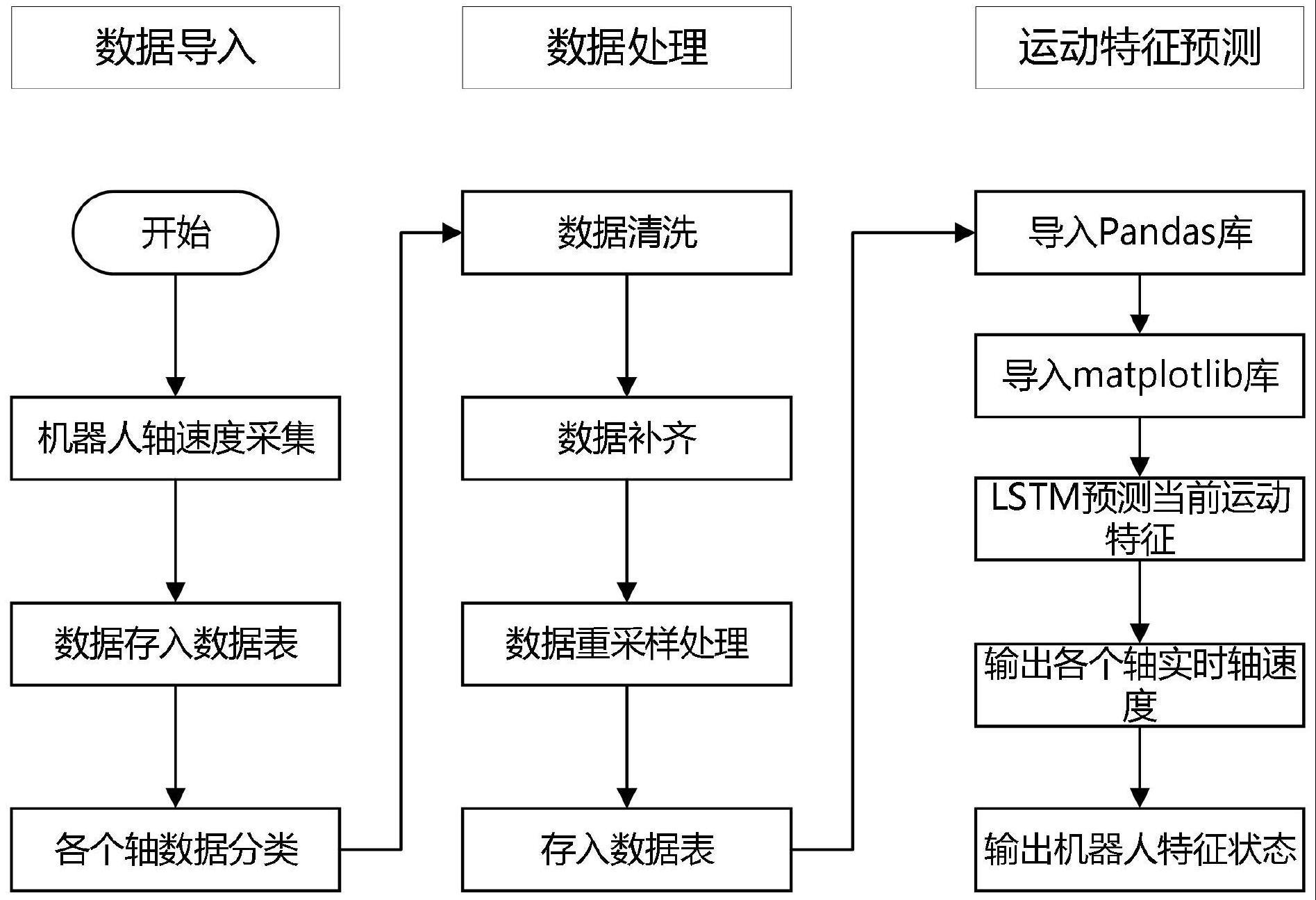
2、为了实现本发明目的,本发明提供的一种机器人运动特征实时识别方法,包括以下步骤:
3、实时采集工业机器人运动过程中各轴的运动数据,所述各轴的运动数据为各轴的轴速度;
4、对采集得到的机器人各个轴的运动数据进行预处理并存储;
5、采用神经网络算法学习机器人各个轴的历史数据,识别当前机器人的多种运动特征并存储特征参数矩阵。
6、进一步地,所述预处理包括数据整合、数据清洗和数据补齐操作;存储包含预处理后的数据。
7、进一步地,采用pandas库来实现数据的整合过程;所述pandas是基于numpy的一种工具,该工具是为解决数据分析任务而创建的。
8、进一步地,根据1到7轴的轴速度状态确定机器人的运动状态。
9、进一步地,所述运动的种类包括工艺动作过程、等待动作过程和轨迹动作过程。
10、进一步地,当1到6轴中一个或多个轴有速度,7轴没有速度时,机器人处于轨迹动作过程;当1到6轴没有速度,7轴有速度时,机器人处于工艺动作过程;当1到7轴都没有速度时,机器人处于等待动作过程。
11、进一步地,神经网络算法将同一时间戳下多个轴的运动特征进行学习,分析识别出当前机器人的运动特征。
12、进一步地,所述神经网络算法为长短期神经网络。
13、进一步地,通过长短期神经网络进行设备当前运动特征的识别即通过设备规律性的过去运动状态进行当前特征的识别,基于过往的设备运动数据,通过标记后来识别设备实时运动特征,基于标记后数据的训练,通过不断的调参,能够精准的定位设备的未来运动特征情况。
14、进一步地,通过神经网络进行设备的运动特征识别过程中,对于lstm神经网络的输出,即设备当前的特征识别值ht通过如下公式(1)进行计算:
15、ht=ot×tanh(ct) (1)
16、式中,ht为当前特征识别值,ct为神经元更新信息,tan h为激活函数,ot为判断神经元传递的输出门信息,该信息是由上一个神经元的输入ht-1即上一时刻下机器人的运动特征和原始输入xt即开始时刻机器人的运动特征经过激活函数和权重参数进行计算,其能够表示为公式(2):
17、ot=σ(wo[ht-1,xt]+bo) (2)
18、公式(2)中,ot为判断神经元传递的输出门信息,σ为激活函数,wo和bo分别为权重参数和偏执参数;ht-1为上一时刻机器人的运动特征值,xt为原始输入(即开始时刻机器人的运动特征),通过不断的迭代计算,能够快速判断出当前的机器人特征。
19、与现有技术相比,本发明至少能够实现以下有益效果:
20、(1)本发明提出一种基于长短期神经网络算法实现机器人运动特征识别的方法。本发明基于机器人本体轴和工具轴的轴速度分析出机器人当前运动特征。该方法阐述了基于机器人本体轴和工具轴的轴速度处理过程,基于处理的数据进行机器人当前运动特征分析。最终识别出机器人处于工艺动作过程、等待动作过程、轨迹动作过程中的哪一个特征。
21、(2)本发明能够实现机器人实时运动特征的识别。采用长短期神经网络(lstm)算法,可以在机器人运动的过程中,分辨出机器人当前处于何种运动特征,并可以识别机器人下一个时间周期的运动特征,为机器人状态监测、故障预判做基础。
22、(3)本发明的实时机器人运动特征识别与传统的识别过程相比,打破了常规思路,直接采集机器人运动状态数据,通过状态数据的分析进行机器人最终特征识别。避免了通过第三方系统识别过程中的识别不准、无法确定机器人当前特征的情况。具有更加精准,更加方便的优势,能够非常精准的判断出机器人当前运动特征。
技术特征:
1.一种机器人运动特征实时识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种机器人运动特征实时识别方法,其特征在于,所述预处理包括数据整合、数据清洗和数据补齐操作;存储包含预处理后的数据。
3.根据权利要求2所述的一种机器人运动特征实时识别方法,其特征在于,采用pandas库来实现数据的整合和存储过程。
4.根据权利要求1所述的一种机器人运动特征实时识别方法,其特征在于,根据1至7轴的轴速度状态确定机器人的运动特征。
5.根据权利要求4所述的一种机器人运动特征实时识别方法,其特征在于,所述运动特征的种类包括工艺动作过程、等待动作过程和轨迹动作过程。
6.根据权利要求5所述的一种机器人运动特征实时识别方法,其特征在于,当1至6轴中一个或多个轴有速度,7轴没有速度时,机器人处于轨迹动作过程;当1至6轴没有速度,7轴有速度时,机器人处于工艺动作过程;当1至7轴都没有速度时,机器人处于等待动作过程。
7.根据权利要求1所述的一种机器人运动特征实时识别方法,其特征在于,神经网络算法将同一时间戳下多个轴的运动特征进行学习,分析识别当前机器人的运动特征。
8.根据权利要求1-7任一所述的一种机器人运动特征实时识别方法,其特征在于,采用神经网络算法学习1至7轴的速度特征。
9.根据权利要求8所述的一种机器人运动特征实时识别方法,其特征在于,所述神经网络算法为长短期神经网络,通过长短期神经网络进行机器人当前运动特征的识别即通过机器人规律性的过去运动特征进行当前特征的识别,基于过往的设备运动数据,通过标记后来识别设备实时运动特征,基于标记后数据的训练,通过不断的调参,精准的识别设备的未来运动特征情况。
10.根据权利要求9所述的一种机器人运动特征实时识别方法,其特征在于,通过神经网络进行设备的运动特征识别过程中,对于lstm神经网络的输出,即设备当前的特征识别值ht通过公式(1)进行计算:
技术总结
本发明提供的一种机器人运动特征实时识别方法,包括以下步骤:实时采集工业机器人运动过程中各轴的运动数据,所述各轴的运动数据为各轴的轴速度;对采集得到的机器人各个轴的运动数据进行预处理和存储;采用神经网络算法学习机器人各个轴的运动历史数据,识别当前机器人的多种运动特征并存储特征参数矩阵。实时采集机器人运动特征数据,通过状态数据的特征分析进行机器人实时特征识别。避免了通过第三方系统识别过程中的识别不准、无法确定机器人当前运动特征的情况。
技术研发人员:贺毅,李巍华,陈祝云,陈浚彬,万海洋,许维冬
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!