一种智能康养机器人和康养系统的制作方法
本发明属于康养机器人领域,涉及一种智能康养机器人和康养系统。
背景技术:
1、太赫兹波是上个世纪80年代中后期才被正式命名,是指频率在0.1thz到10thz范围,波长在0.03到3mm范围的电磁波。近年来已成世界许多发达国家的研究热点。太赫兹波具有很强的穿透性,能与人体内代谢产生微共振,使物质小分子化,促进代谢吸收;清除体内自由基,预防亚健康。
2、康养机器人作为康养的设备,逐渐受到认可,并被广泛使用,但现有的康养机器人存在功能单一、设备简单以及智能化程度低等问题,无法为康养对象提供综合性的多功能机器人。
技术实现思路
1、本发明为了克服现有技术的不足,提供一种智能康养机器人和康养系统。
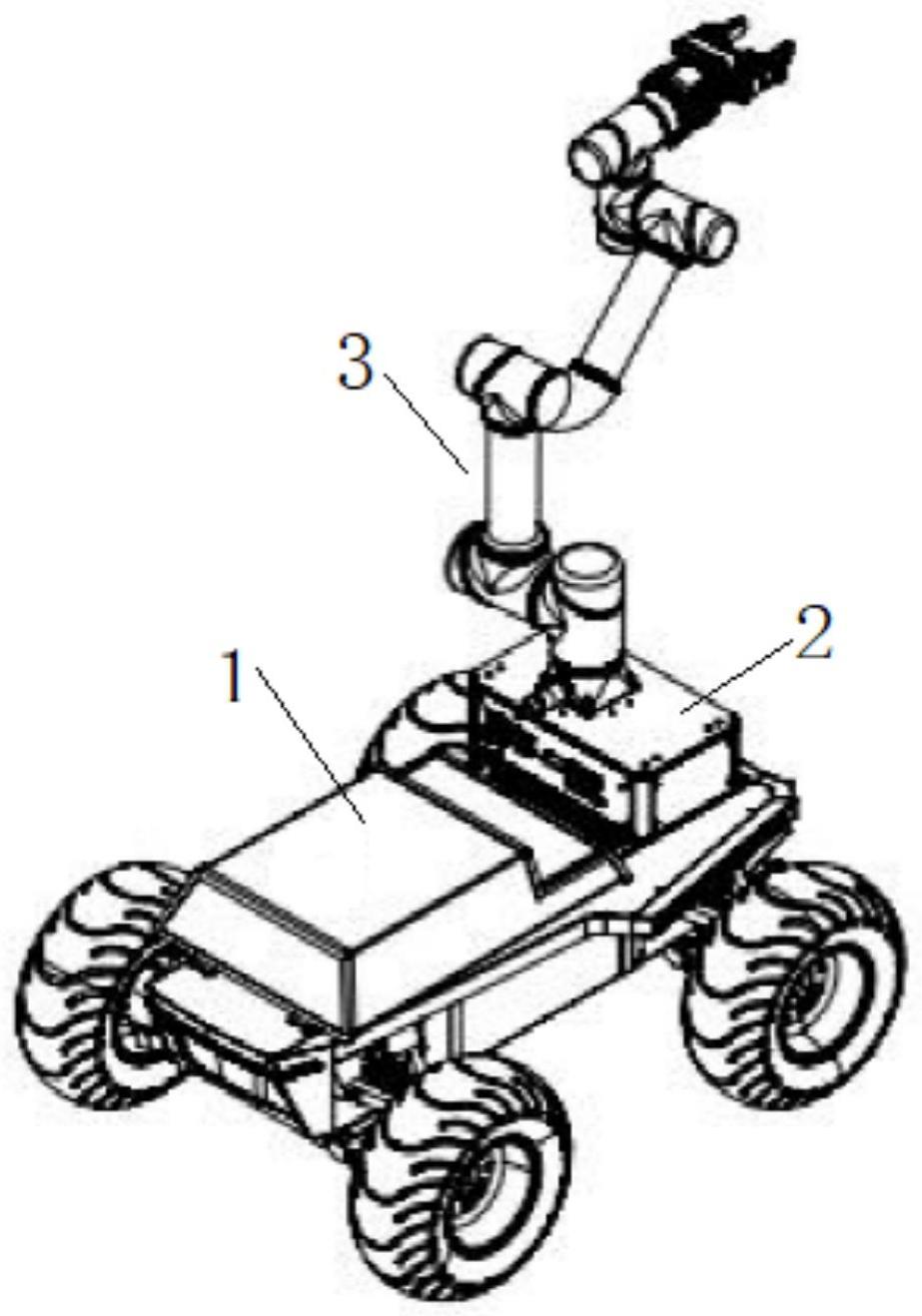
2、为了实现上述目的,本发明采用以下技术方案:一种智能康养机器人,包括控制装置以及与控制装置连接的负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置,负氧离子装置、石墨烯装置和定位装置分别设置于移动平台,控制装置控制负氧离子装置、石墨烯装置、、太赫兹发生器、移动平台和定位装置的启闭和运行;
3、负氧离子装置,用于产生负氧离子;
4、石墨烯装置,用于产生远红外线能量波。
5、进一步的,所述控制装置包括语音模块和控制模块,控制模块与负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置有线或无线连接,控制模块向负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置发送执行命令。
6、进一步的,所述控制装置还包括心肺检测仪,心肺检测仪与控制模块连接,心肺检测仪检测康养对象康养前后的数据,并将数据传输至控制模块。
7、进一步的,所述定位装置包括六轴机械臂,六轴机械臂的固定端固设在移动平台,六轴机械臂的六轴运动由控制装置控制,太赫兹发生器设置在六轴机械臂的自由端,太赫兹发生器通过六轴机械臂的运动移动至目标康养位置。
8、进一步的,所述远红外线能量波的波长为4-14μm。
9、进一步的,还包括机箱,所述控制装置设置于机箱,机箱设置在移动平台。
10、进一步的,还包括防撞装置,所防撞雷达设置于移动平台。
11、进一步的,还包括供电装置,所述供电装置设置于移动平台,供电装置为负氧离子装置、石墨烯装置、太赫兹发生器、控制装置、移动平台和定位装置供电。
12、一种康养系统,包括远程操控模块和权利要求1-8任一项所述的智能康养机器人,一组远程操控模块与多组智能康养机器人连接,智能康养机器人的控制模块与远程操控模块无线连接。
13、进一步的,所述定位装置还包括视觉定位器,视觉定位器固设在六轴机械臂的自由端,视觉定位器采集的图像发送至远程操控模块,操作者通过视觉定位器采集的图像远程确认太赫兹发生器是否正对目标康养位置。
14、综上所述,本发明的有益之处在于:
15、1)本发明的康养机器人搭配负氧离子装置、石墨烯装置以及太赫兹发生器,实现对康养空间清洁、康养对象疗愈的功能,提高了康养对象的康养效率和质量。
16、2)机器人作为康复、疗养以及治疗的设备,逐渐受到认可,并被广泛使用,但现有的康养机器人存在功能单一、设备简单以及智能化程度低等问题,无法为康养对象提供综合性的多功能机器人。
17、3)本发明通过负氧离子装置,改善康复空间的空气质量,特别是减少空调房内的大分子阳性粒子的含量,提升康复空间的负氧离子含量,有效提升康养对象的心肺效率,改善血氧饱和度。
18、4)本发明通过石墨烯装置产生波长为4-14μm的远红外线能量波,可以有效作用于细胞,产生生物共振,活化蛋白质等生物大分子,从而增强机体免疫功能,修复损坏细胞,增强人体生物细胞组织的再生能力,促进体内微循环,加速供给养分核酵素,促进身体健康,使有害物质和脂肪被释放并排出体外,给予身体活力的同时,还能排除体内毒素和垃圾,实现促进人体新陈代谢、血液循环,达到疗愈效果,按摩功效,有效缓解身体各部位的疲劳与酸痛的效果,同时实现人体经络运行所需的量子震荡频率,提升能量注穴技术的效率,最终实现康复效率的提升。
19、5)本发明通过太赫兹发生器产生太赫兹光波,太赫兹光波作用于康养对象的康养位置,太赫兹光波可以实现激活生物大分子的活性;促进和改善血液循环;增强新陈代谢;提高人体免疫功能;镇痛消炎消肿作用;调节自律神经以及护肤美容的效果。
20、6)本发明通过控制装置控制负氧离子装置、石墨烯装置、、太赫兹发生器、移动平台1和定位装置的启闭和运行,实现康养机器人的自动控制,提高了自动化水平。
21、7)本发明的一组远程操控模块与多组智能康养机器人连接,实现一对多的远程操控,大大减少了人员的投入,适合大规模标准化推广。
技术特征:
1.一种智能康养机器人,其特征在于:包括控制装置以及与控制装置连接的负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置,负氧离子装置、石墨烯装置和定位装置分别设置于移动平台,控制装置控制负氧离子装置、石墨烯装置、、太赫兹发生器、移动平台和定位装置的启闭和运行;
2.根据权利要求1所述的一种智能康养机器人,其特征在于:所述控制装置包括语音模块和控制模块,控制模块与负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置有线或无线连接,控制模块向负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置发送执行命令。
3.根据权利要求2所述的一种智能康养机器人,其特征在于:所述控制装置还包括心肺检测仪,心肺检测仪与控制模块连接,心肺检测仪检测康养对象康养前后的数据,并将数据传输至控制模块。
4.根据权利要求1所述的一种智能康养机器人,其特征在于:所述定位装置包括六轴机械臂,六轴机械臂的固定端固设在移动平台,六轴机械臂的六轴运动由控制装置控制,太赫兹发生器设置在六轴机械臂的自由端,太赫兹发生器通过六轴机械臂的运动移动至目标康养位置。
5.根据权利要求1所述的一种智能康养机器人,其特征在于:所述远红外线能量波的波长为4-14μm。
6.根据权利要求1所述的一种智能康养机器人,其特征在于:还包括机箱,所述控制装置设置于机箱,机箱设置在移动平台。
7.根据权利要求1所述的一种智能康养机器人,其特征在于:还包括防撞装置,所防撞雷达设置于移动平台。
8.根据权利要求1所述的一种智能康养机器人,其特征在于:还包括供电装置,所述供电装置设置于移动平台,供电装置为负氧离子装置、石墨烯装置、太赫兹发生器、控制装置、移动平台和定位装置供电。
9.一种康养系统,其特征在于:包括远程操控模块和权利要求1-8任一项所述的智能康养机器人,一组远程操控模块与多组智能康养机器人连接,智能康养机器人的控制模块与远程操控模块无线连接。
10.根据权利要求9所述的一种康养系统,其特征在于:所述定位装置还包括视觉定位器,视觉定位器固设在六轴机械臂的自由端,视觉定位器采集的图像发送至远程操控模块,操作者通过视觉定位器采集的图像远程确认太赫兹发生器是否正对目标康养位置。
技术总结
本发明公开了一种智能康养机器人和康养系统,包括控制装置以及与控制装置连接的负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置,负氧离子装置、石墨烯装置和定位装置分别设置于移动平台,控制装置控制负氧离子装置、石墨烯装置、太赫兹发生器、移动平台和定位装置的启闭和运行;负氧离子装置,用于产生负氧离子;石墨烯装置,用于产生远红外线能量波;本发明的康养机器人搭配负氧离子装置、石墨烯装置以及太赫兹发生器,实现对康养空间清洁、康养对象疗愈的功能,提高了康养对象的康养效率和质量。
技术研发人员:李国强,潘永华,刘书用
受保护的技术使用者:杭州橙果云智能科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!