本发明属于微型机器人,特别涉及一种磁控微型软体机器人的多模态驱动及制备方法。
背景技术:
1、软体机器人采用软材料或柔性材料以及合理的机械结构构成,可实现连续变形,具有优异的灵活性、柔韧性以及无限的自由度,适用于各种复杂环境下的人机交互,具有广阔的应用前景。微型机器人由于其结构尺寸微小、器件精密,可应用在复杂环境下其他机器人无法工作的场合,进行微定位和微操作等。微型机器人已成为现代化机器人技术发展的一个重要方向,在医疗、生物工程、健康领域取得了较大的进步,逐步从实验研究进入临床应用阶段。
2、目前微型机器人的驱动方式主要由两种,有缆驱动和无缆驱动。但是由于微型机器人体积小,很难实现微型机器人的内置能量供给,无缆化是微型机器人发展的必然趋势。目前无缆微型机器人的驱动控制方式有光、电、热及磁场等。其中,磁场作为一种获取简单、调试方便、能够无损穿透生物组织的驱动方式,引起了国内外研究人员的广泛关注。已公开专利申请cn 201711287241.9公开了一种磁控定向快速移动的微纳米机器人,该机器人能够在雷诺数低的环境中进行弯曲和摆动,从而驱使机器人快速移动。但是,该机器人受限于结构设计,只能实现延磁场方向的快速移动,而没有其他的运动模式,功能较为单一。
技术实现思路
1、本发明的目的在于提供一种磁控微型软体机器人的多模态驱动及制备方法,在永磁体的驱动下可实现仿尺蠖式运动、蠕动运动和翻滚运动三种运动模态。为实现上述目的,采用如下技术方案:
2、一种磁控微型软体机器人的多模态驱动方法,包括以下步骤:
3、步骤1、设计软体机器人:
4、软体机器人的前足和后足均由磁化强度相同的磁性硅胶模块组成,前足和后足的磁化方向相反;前足的s极和后足的s极均与躯干连接;连接前足和后足的躯干由水凝胶材料制成;
5、步骤2、仿尺蠖式运动,具体包括以下步骤:
6、步骤2a、安装软体机器人、用于驱动软体机器人沿x轴移动的永磁体:
7、步骤2a1、将永磁体置于软体机器人的下方,使得永磁体的s极靠近软体机器人设置;永磁体沿z轴的位置不变;
8、步骤2a2、将永磁体的初始位置置于远离软体机器的一侧,使得永磁体和软体机器人沿着x轴朝相反的方向移动;
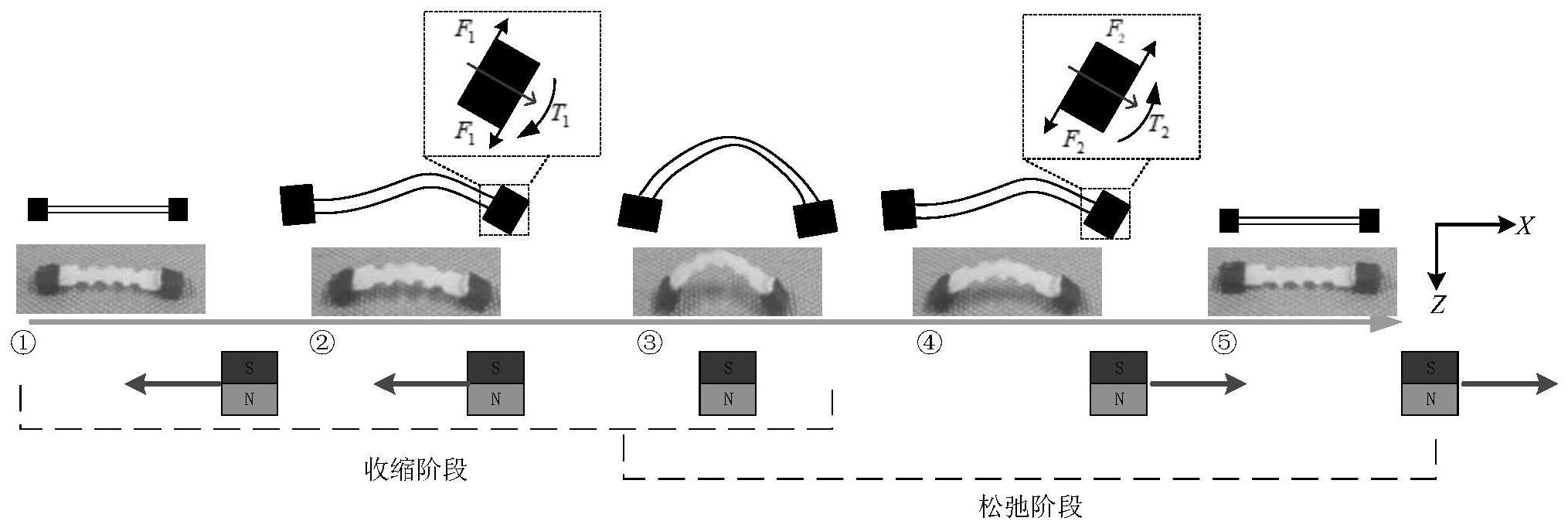
9、步骤2b、进行仿尺蠖式运动,包括收缩阶段和松弛阶段:
10、步骤2b1、收缩阶段,具体包括以下步骤:
11、永磁体由初始位置,沿着x轴的负方向朝软体机器人前足靠近,软体机器人的躯干前段拱起,前足在静摩擦力的作用下锚定在接触面以实现固定,从而带动前足向x轴的正方向运动;
12、当永磁体移动到软体机器人正下方时,软体机器人两足部受到的磁力、磁力矩对称,从而整体保持平衡,收缩阶段结束;
13、步骤2b2、松弛阶段,具体包括以下步骤:
14、永磁体沿x轴的正方向向初始位置复位,软体机器人的躯干后段拱起,后足在静摩擦力的作用下锚定在接触面以实现固定,带动前足沿x轴的正方向运动;
15、当永磁体回到初始位置时,软体机器人恢复到初始状态,松弛阶段结束,至此完成了一个周期的运动;
16、步骤3、蠕动运动,具体包括:
17、步骤3a、安装步骤1中的软体机器人、用于驱动软体机器人蠕动的永磁体,具体包括:将永磁体置于软体机器人的上方,使得永磁体处于初始状态时,其s极靠近软体机器人设置;
18、步骤3b、沿着顺时针方向,绕永磁体自身中心线旋转永磁体以驱动软体机器人进行蠕动运动,具体包括:
19、第一阶段:机器人两足部在磁场的作用下向上弯曲;永磁体旋转90度以进入第二阶段;
20、第二阶段:随着旋转过程中磁场方向的改变,第二阶段中机器人前足向下弯曲;永磁体旋转90度以进入第三阶段;
21、第三阶段:两足部受到相同的磁力矩,同时向下弯曲;永磁体旋转90度以进入第四阶段;
22、第四阶段:前足向上弯曲,后足锚定,机器人整体产生向前的位移;永磁体旋转90度以进入第五阶段;
23、第五阶段:两足部恢复到第一阶段的初始状态。
24、优选地,还包括翻滚运动,具体包括以下步骤:
25、步骤4a、安装软体机器人、用于驱动软体机器人翻滚以实现其沿x轴移动的永磁体:
26、使得永磁体的s极靠近软体机器人设置,此时其躯干弯曲、双足向上弯曲,躯干弯曲并与接触面接触;
27、初始状态时,将永磁体设置于软体机器人的上方;
28、步骤4b、保持永磁体的s极靠近软体机器人,永磁体的旋转运动速度w1的方向与机器人的旋转运动速度w2的方向相反;
29、其中,永磁体的平移运动速度v1,逆时针旋转运动速度w1,
30、机器人对应的平移运动速度v2,顺时针旋转运动速度为w2。
31、优选地,在制作水凝胶过程中加入生物染色剂甲基蓝来模拟药物。
32、优选地,躯干两侧的凹槽提高多模态软体机器人的转向能力,使机器人能够在狭窄的缝隙中进行转弯运动。
33、磁控微型软体机器人的制备方法,包括以下步骤:
34、步骤a、利用solidworks制图软件绘制机器人足部与躯干对应模具的三维模型;
35、步骤b、将三维模型导入软件modellight中进行切片处理;然后,采用pla材料与3d打印技术完成模具的制造;
36、步骤c、在模具内表面涂上凡士林,将ecoflex-30硅胶溶液按照1:1配置好,然后再将混合溶液与钕铁硼颗粒以1:1质量比混合,放入真空消泡机消去气泡,最后将混合溶液倒入模具中;
37、步骤d、将模具放置在电热板上加快溶液凝固,凝固成型后进行脱模操作,将成型的足部模块放入充磁机中磁化;
38、步骤e、将磁化后的足部模块以相反的磁化方向放入模具中,利用hofmei ster效应辅助的明胶水凝胶填充躯干部份,待水凝胶完全凝固后取出多模态软体机器人。
39、与现有技术相比,本发明的优点为:
40、软体机器人结构和制作工艺简单,且易于控制,在永磁体的驱动下可实现仿尺蠖式运动、蠕动运动和翻滚运动三种运动模态,具有极高的生物形态模拟特性和重复使用特性。
技术特征:1.一种磁控微型软体机器人的多模态驱动方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的磁控微型软体机器人的多模态驱动方法,其特征在于,还包括翻滚运动,具体包括以下步骤:
3.根据权利要求1所述的磁控微型软体机器人的多模态驱动方法,其特征在于,在制作水凝胶过程中加入生物染色剂甲基蓝来模拟药物。
4.根据权利要求1所述的磁控微型软体机器人的多模态驱动方法,其特征在于,躯干两侧的凹槽提高多模态软体机器人的转向能力,使机器人能够在狭窄的缝隙中进行转弯运动。
5.磁控微型软体机器人的制备方法,其特征在于,包括以下步骤:
技术总结本发明提出了一种磁控微型软体机器人的多模态驱动及制备方法,该驱动方法包括:步骤1、设计软体机器人:步骤2、仿尺蠖式运动:步骤2A、安装软体机器人、用于驱动软体机器人沿X轴移动的永磁体:步骤2B、进行仿尺蠖式运动,包括收缩阶段和松弛阶段:步骤3、蠕动运动:步骤3A、安装步骤1中的软体机器人、用于驱动软体机器人蠕动的永磁体:步骤3B、沿着顺时针方向,绕永磁体自身中心线旋转永磁体以驱动软体机器人进行蠕动运动。本发明中,在永磁体的驱动下可实现仿尺蠖式运动、蠕动运动和翻滚运动三种运动模态,具有极高的生物形态模拟特性和重复使用特性。
技术研发人员:徐丰羽,李奔,马凯威,蒋振江,范保杰
受保护的技术使用者:南京邮电大学
技术研发日:技术公布日:2024/1/16