一种抓持机械手及搬运系统的制作方法
本发明涉及机械手领域,尤其涉及一种抓持机械手及搬运系统。
背景技术:
1、在目前电池行业内,对pack的抓取和搬运所采用的机械手主要采用如下两种:真空吸附式机械手以及两侧抓夹式机械手,其中,真空吸附式机械手通常使用真空吸盘吸附pack顶部的表面来进行抓取,而真空吸附式机械手对pack的表面要求比较高,需要无大面积异形凸起或者凹陷的结构,由于pack在设计及生产的过程中,pack结构主要有有“土”字型、“凹”字型、“t”字型和“滑板”式,也即,pack结构难免有异形凸起或者凹陷的结构或者曲面表面,并且,吸盘本身会产生变形,因此,这使得真空吸附式机械手需要较高的定位和对吸盘本身进行长期检修、维护。
2、而两侧抓夹式机械手,如可参考2021年8月27日公开的申请公布号cn113307031a的一种用于抓取箱包的机器人复合抓手的操作方法,由于抓手抓包时,首先根据袋子的大小,调整抓手的抓取宽度,复合抓手通过可调气缸和可调气缸调节长抓齿和短抓齿的宽度,调好宽度后,吸盘的气缸处于关闭状态,复合抓手的长抓齿和短抓齿抓包,同时,压包组件的气缸启动,压包板下压包装袋,抓手完成抓包动作,开始码包工作。这样,长抓齿和短抓齿在抓包的过程中,需要预留足够的空间以便于长抓齿和短抓齿进行偏转运动,即pack之间的摆放间距需要预留足够大,这使得pack的生产装配空间需要大,使得生产装配pack的空间利用率较为低下。
技术实现思路
1、为了克服上述现有技术所述的至少一种缺陷,本发明提供一种抓持机械手及搬运系统,能够实现在pack之间的摆放间距极窄的情况下进行稳定抓取的目的,且不需要较高的定位精度和维护成本。
2、本发明为解决其问题所采用的技术方案是:
3、一种抓持机械手,包括:
4、若干个抓持装置,每一所述抓持装置均包括有转向执行件及钩爪构件,所述钩爪构件连接于所述转向执行件的执行端,若干个所述抓持装置之间成型有抓持工位区;
5、压紧装置,所述压紧装置设置于所述抓持工位区的内部;
6、所述转向执行件驱使所述钩爪构件的抓持端绕其中心线旋转,并配合所述压紧装置,以对所述抓持工位区内的标的物件进行夹持。
7、在本发明的一些实施例中,所述钩爪构件包括钩爪支撑臂及抓持延伸臂,所述抓持延伸臂为所述钩爪构件的抓持端,所述抓持延伸臂设置于所述钩爪支撑臂的侧壁,所述钩爪支撑臂固定连接于所述转向执行件的执行端。
8、在本发明的一些实施例中,所述钩爪构件的抓持端设置有第一缓冲件。
9、在本发明的一些实施例中,所述转向执行件上设置有磁感应开关。
10、在本发明的一些实施例中,所述压紧装置包括有驱动装置及活塞伸缩件,所述活塞伸缩件活动连接所述驱动装置,所述活塞伸缩件上设置有第二缓冲件。
11、在本发明的一些实施例中,所述压紧装置上配置接近传感器。
12、在本发明的一些实施例中,该抓持机械手还包括有抓手固定座,所述抓手固定座上设置有法兰连接件,所述压紧装置及若干个所述抓持装置均安装固定于所述抓手固定座。
13、在本发明的一些实施例中,该抓持机械手还包括有视觉定位装置和光源装置,所述视觉定位装置及所述光源装置均所述抓持工位区的一侧,并均固定连接于所述抓手固定座。
14、在本发明的一些实施例中,所述抓持装置和/或所述压紧装置上设置有伸缩调节件。
15、在本发明还公开了一种搬运系统,包括:
16、上述的抓持机械手;
17、定位固定架,所述定位固定架上具有若干个定位工位区,所述抓持机械手活动设置于所述定位固定架的上方。
18、综上所述,本发明提供的一种抓持机械手及搬运系统,具有如下技术效果:
19、本发明利用压紧装置与能够绕着自身中心线转动的抓持装置相结合,不仅实现标的物件(即现有技术中较为重要的精密物件pack)的稳定抓持,还避免抓持装置绕某一中心点转动所导致的标的物件之间间距空间过大的问题,从而实现在标的物件之间间距极窄的情况下进行抓取的目的,有效地提高了标的物件储放空间的利用率。并且,对标的物件的边缘位置的受力和标的物件与压紧装置之间的点接触或小面积接触所形成的夹持配合,能够有效降低了抓持机械手的定位精度,且降低了抓持机械手的维护成本。
技术特征:
1.一种抓持机械手,其特征在于,包括:
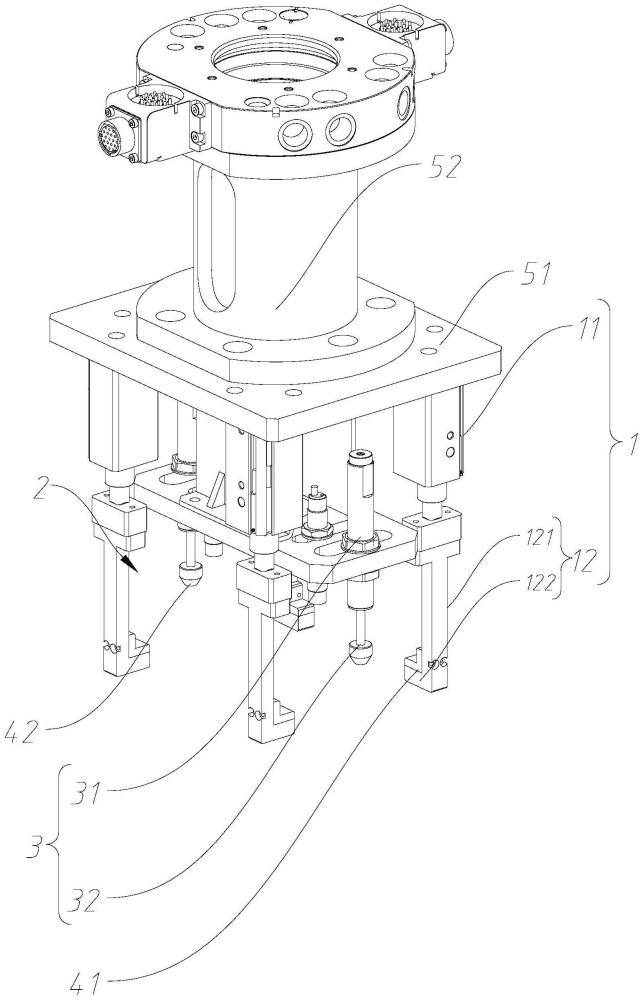
2.根据权利要求1所述的抓持机械手,其特征在于:所述钩爪构件(12)包括钩爪支撑臂(121)及抓持延伸臂(122),所述抓持延伸臂(122)为所述钩爪构件(12)的抓持端,所述抓持延伸臂(122)设置于所述钩爪支撑臂(121)的侧壁,所述钩爪支撑臂(121)固定连接于所述转向执行件(11)的执行端。
3.根据权利要求1或2所述的抓持机械手,其特征在于:所述钩爪构件(12)的抓持端设置有第一缓冲件(41)。
4.根据权利要求1或2所述的抓持机械手,其特征在于:所述转向执行件(11)上设置有磁感应开关。
5.根据权利要求1所述的抓持机械手,其特征在于:所述压紧装置(3)包括有驱动装置(31)及活塞伸缩件(32),所述活塞伸缩件(32)活动连接所述驱动装置(31),所述活塞伸缩件(32)上设置有第二缓冲件(42)。
6.根据权利要求1或5所述的抓持机械手,其特征在于:所述压紧装置(3)上配置接近传感器。
7.根据权利要求1或2或5所述的抓持机械手,其特征在于:还包括有抓手固定座(51),所述抓手固定座(51)上设置有法兰连接件(52),所述压紧装置(3)及若干个所述抓持装置(1)均安装固定于所述抓手固定座(51)。
8.根据权利要求7所述的抓持机械手,其特征在于:还包括有视觉定位装置(8)和光源装置,所述视觉定位装置(8)及所述光源装置均所述抓持工位区(2)的一侧,并均固定连接于所述抓手固定座(51)。
9.根据权利要求1或2或5所述的抓持机械手,其特征在于:所述抓持装置(1)和/或所述压紧装置(3)上设置有伸缩调节件。
10.一种搬运系统,其特征在于,包括:
技术总结
本发明公开了一种抓持机械手,包括若干个抓持装置,每一抓持装置均包括有转向执行件及钩爪构件,钩爪构件连接于转向执行件的执行端,若干个抓持装置之间成型有抓持工位区;压紧装置,压紧装置设置于抓持工位区的内部;转向执行件驱使钩爪构件的抓持端偏转,并配合压紧装置,以对抓持工位区内的标的物件进行夹持。同时,还公开了一种应用上述抓持机械手的搬运系统,实现在PACK之间的摆放间距极窄的情况下进行稳定抓取的目的,且不需要较高的定位精度和维护成本。
技术研发人员:牛建雄,刘志成,王帅,罗松柏,陈术平
受保护的技术使用者:惠州亿纬动力电池有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!