一种用于设置保护套的移动站的制作方法
本公开涉及机器人控制领域,尤其涉及一种用于设置保护套的移动站。
背景技术:
1、随着自动化技术的不断发展,在机器人领域,人机协同作业或自动化作业是一个发展方向。在作业过程中,有时需要将机器人的至少一部分与环境隔离开以满足作业区域的无菌要求或是保护机器人免受环境侵蚀。例如,手术机器人的至少一部分处于具有无菌要求的手术环境中,以深入人体内实现不同部位的外科手术。由于手术机器人通常包含电气和机械模块,一般不能用蒸气、热压或化学制品等常规方法灭菌。因此,需要将无菌的保护套套设在手术机器人的至少一部分上,以将非无菌的手术机器人与无菌区域隔开。
2、但是,现有的保护套由工作人员手动套设在机器人上,难于安装且操作费时,也容易污染无菌区域或是造成保护套失效。因此,需要提供一种套设保护套的装置,能根据机器人的位姿和构型,自动执行保护套的套设作业。
技术实现思路
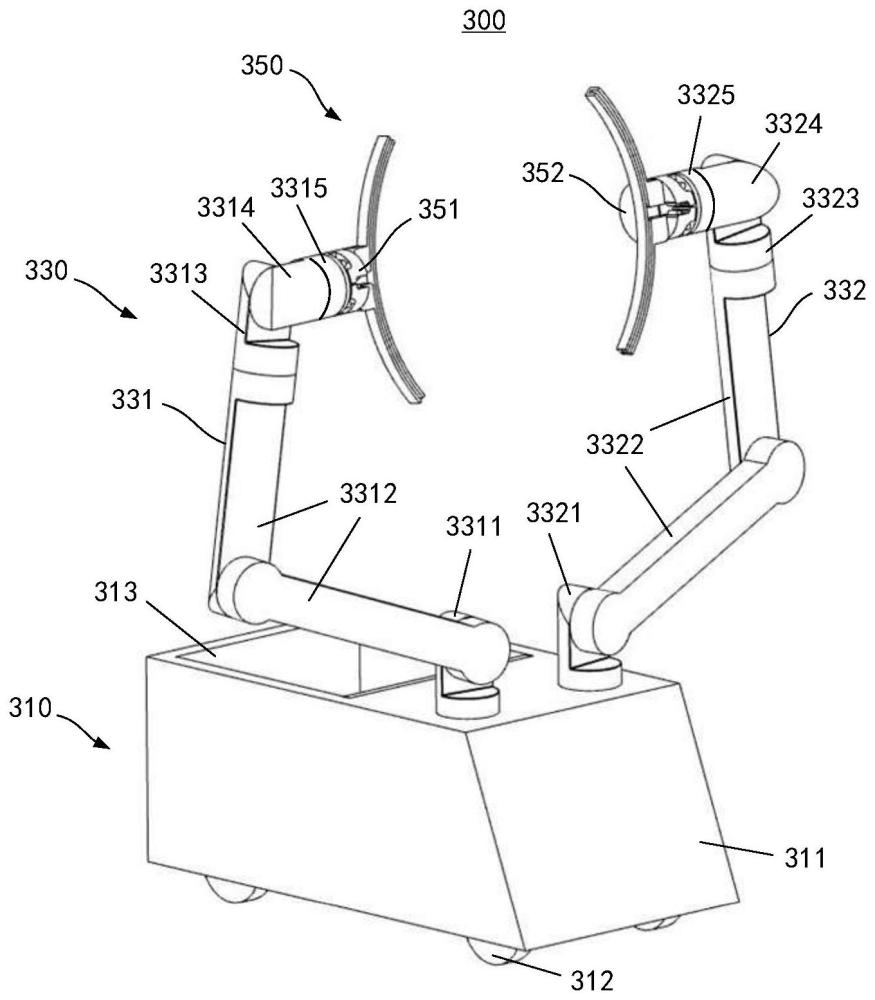
1、在一些实施例中,本公开提供一种用于设置保护套的移动站,包括:基座,相对于地面可移动;套装臂组件,包括设置在基座上的第一套装臂和设置在基座上并与第一套装臂相对的第二套装臂,执行器组件,用于保持保护套的开口,包括设置在第一套装臂末端的第一执行器和设置在第二套装臂末端的第二执行器;以及控制装置,与基座、套装臂组件以及执行器组件连接,配置为控制基座和/或套装臂组件运动,以使执行器组件将保护套套设在手术机器人的至少一部分上。
技术特征:
1.一种用于设置保护套的移动站,其特征在于,包括:
2.根据权利要求1所述的移动站,其特征在于,
3.根据权利要求1所述的移动站,其特征在于,
4.根据权利要求3所述的移动站,其特征在于,
5.根据权利要求4所述的移动站,其特征在于,
6.根据权利要求1所述的移动站,其特征在于,
7.根据权利要求6所述的移动站,其特征在于,
8.根据权利要求7所述的移动站,其特征在于,
9.根据权利要求8所述的移动站,其特征在于,
10.根据权利要求1所述的移动站,其特征在于,
11.根据权利要求1所述的移动站,其特征在于,
12.根据权利要求1所述的移动站,其特征在于,
技术总结
本公开涉及机器人控制领域,公开一种用于设置保护套的移动站,包括:基座,相对于地面可移动;套装臂组件,包括设置在基座上的第一套装臂和设置在基座上并与第一套装臂相对的第二套装臂,执行器组件,用于保持保护套的开口,包括设置在第一套装臂末端的第一执行器和设置在第二套装臂末端的第二执行器;以及控制装置,与基座、套装臂组件以及执行器组件连接,配置为控制基座和/或套装臂组件运动,以使执行器组件将保护套套设在手术机器人的至少一部分上。
技术研发人员:徐凯,朱传祥,张钰林,姬利永,张宇
受保护的技术使用者:术锐(上海)科技有限公司
技术研发日:
技术公布日:2025/3/13
- 还没有人留言评论。精彩留言会获得点赞!