一种多功能机械臂加样及搬运装置的制作方法
本申请涉及机械臂加样,特别涉及一种多功能机械臂加样及搬运装置。
背景技术:
1、微生物药敏工程技术是当今乃至未来与人类息息相关的技术,现有的微生物前处理培养技术主要以人工为主,随着人们对微生物药敏检定需求的不断提升,提供微生物培养效率,改善操作人员工作环境,缩短检测培养时间是势在必行的研究课题。然而在培养时间不变的情况下,如何提高测试的连续性、自动化和避免客观因素的干扰成为目前的难点。
2、目前,在药敏前处理过程中,工作平台的多物料搬运和样品的移液加样通常使用机械臂实现,在设备限定区域内,需要机械臂搬运多种物料,搬运和移动多种规格且放置时需保证较高的准确性。同时机械臂需要具备加样功能,能把样品从储样装置中取出,然后无接触精确的点在样品靶板上,同时能够自动取放加样枪头。但是现有的众多机械臂均无法同时加样和搬运多种样品工作,影响药品的加样和搬运效率。
3、因此,针对上述技术问题,如何设计一种能够不停机加样和搬运多种样品工作,从而达到高效加样兼具搬运的多功能机械臂加样及搬运装置是本领域技术人员需要解决的技术问题。
技术实现思路
1、本申请的目的是提供一种多功能机械臂加样及搬运装置,该装置能够实现不停机加样和搬运多种样品工作,从而达到高效加样兼具搬运的目的。
2、为实现上述目的,本申请提供一种多功能机械臂加样及搬运装置,包括:
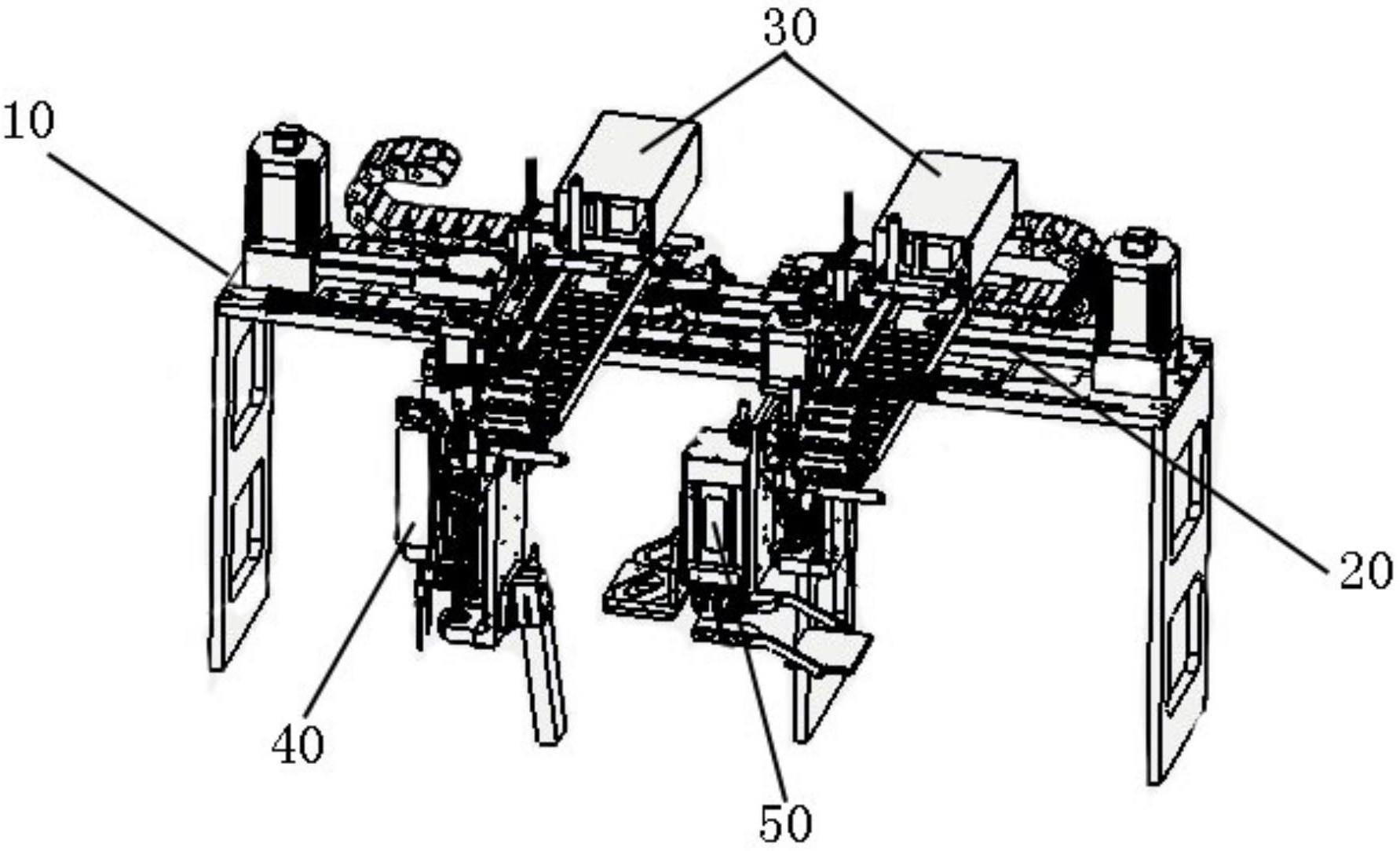
3、装置平台,包括平台板以及用于支撑所述平台板的多个立板,所述平台板端面上沿其长度方向设置有第一导轨;
4、两组传动件,设置于所述平台板上,任一所述传动件均包括设置于所述平台板上的第一电机以及设置于所述平台板上的第一惰轮,所述第一电机的动力端设置有第一带轮,所述第一带轮与所述第一惰轮通过第一同步带传动;
5、两组移动平台,滑动设置于所述第一导轨上,且两组所述移动平台分别与两个不同的所述第一同步带连接,通过所述第一同步带带动所述移动平台沿所述第一导轨做往返运动;
6、其中,任一组所述移动平台包括与所述第一导轨滑动连接的安装板,在所述安装板侧壁并沿其长度方向设置有第二导轨,所述安装板上设置有第二电机以及第二惰轮,所述第二电机的动力端设置有第二带轮,所述第二带轮与所述第二惰轮通过第二同步带传动;
7、加样组件,滑动设置于一组所述移动平台上,包括与所述第二导轨滑动设置并与所述第二同步带固定连接的加样安装板,所述加样安装板上滑动设置有加样泵,所述加样泵端部设置有用于取样的枪头;
8、移载组件,滑动设置于另一组所述移动平台上,包括与所述第二导轨滑动设置并与所述第二同步带固定连接的移载安装板,所述移载安装板上滑动设置有用于夹取物体的夹爪。
9、优选地,所述加样组件还包括:
10、第三电机,固定设置于所述加样安装板上,所述第三电机的动力端设置有第三丝杆;
11、第三导轨,固定设置于所述加样安装板侧壁,并与所述第三丝杆平行设置;
12、第三连接板,滑动设置于所述第三导轨上,且所述第三连接板上设置有与所述第三丝杆配合的第三螺母,所述第三连接板背离所述第三导轨的端部连接所述加样泵,所述第三丝杆用于带动所述第三连接板以及所述加样泵在所述第三导轨上滑动;
13、控制单元,用于控制所述第三电机的启停以及正反转运动。
14、优选地,所述加样安装板背离所述第三导轨的侧壁上设置有扫码枪,且所述扫码枪与所述加样安装板倾斜设置,用于扫码、识别和记录样品信息。
15、优选地,所述加样泵两侧设置有支架,所述支架与所述第三连接板固定连接,且在所述支架外壁上有用于对样品进行拍照的相机。
16、优选地,所述支架外壁上还设置有排线压片,所述加样安装板上设置有排线板,线束通过所述排线板以及所述排线压片压紧固定。
17、优选地,所述移载组件还包括:
18、第四电机,固定设置于所述移载安装板上,所述第四电机的动力端设置有第四丝杆;
19、第四导轨,固定设置于所述移载安装板侧壁,并与所述第四丝杆平行设置;
20、第四连接板,滑动设置于所述第四导轨上,且所述第四连接板上设置有与所述第四丝杆配合的第四螺母,所述第四丝杆用于带动所述第四连接板在所述第四导轨上滑动;
21、夹爪电机,位于所述第四连接板背离所述第四导轨的端部,并随所述第四连接板移动,所述夹爪电机动力端连接有所述夹爪。
22、优选地,所述夹爪背离所述夹爪电机的端部设置有夹取物体的夹指。
23、优选地,所述夹爪电机侧壁固定设置有压紧板,所述压紧板呈直角形设置,且在直角处设置有加强筋,所述压紧板随所述夹爪电机移动,用于实现对物体的压紧。
24、优选地,任一组所述移动平台上设置有控制模块,所述控制模块用于控制所述第一电机以及所述第二电机的启停以及正反转运动。
25、优选地,所述平台板上设置有第一光电开关,所述第一光电开关用于检测所述移动平台的运行位置,并将检测信号传输至控制模块。
26、优选地,所述平台板上设置有第一拖链,所述控制模块以及所述第一光电开关的线缆通过所述第一拖链柔性运动设置。
27、优选地,任一组所述移动平台上均设置有第二拖链,所述第二拖链用于将所述移动平台上的线束柔性运动设置。
28、优选地,所述加样安装板上设置有第二光电开关,所述第三连接板上设置有用于改变所述第二光电开关状态的第二挡片,所述第二光电开关位于所述第三导轨端部,并与所述控制单元电连接,用于控制所述第三电机的起始工作精度。
29、优选地,所述移载安装板上设置有第三光电开关,所述第四连接板上设置有用于改变所述第三光电开关状态的第三挡片,所述第三光电开关位于所述第四导轨端部,用于控制所述第四电机的起始工作精度。
30、优选地,所述加样安装板和/或所述移载安装板上设置有第三拖链,所述第三拖链用于将所述加样组件和/或所述移载组件的线束柔性运动设置。
31、相对于上述背景技术,本申请的多功能机械臂加样及搬运装置,利用传动件实现移动平台在平台板上的往返运动,并且移动平台滑动设置于第一导轨上,能够达到平稳滑动的效果;移动平台自身设置有第二导轨、第二电机以及第二惰轮,第二电机的动力端与第二惰轮通过第二同步带传动;同时,加样组件以及移载组件分别设置在两组移动平台上,并通过第二导轨以及第二同步带实现两者沿移动平台滑动,从而达到可以同时加样以及搬运的目的,互不影响,提高加样和搬运效率。另外,加样泵滑动设置于加样组件上,加样泵端部设置有用于取样的枪头,能够满足不同高度的加样工作;夹爪滑动设置与移载组件上,并且夹爪自身可以全角度旋转进行不同部位的夹取,能够满足不同高度以及不同物体形状的夹取。因此,采用上述方式设置的加样及搬运装置,能够实现不停机加样和搬运多种样品工作,从而达到高效加样兼具搬运的目的。
技术特征:
1.一种多功能机械臂加样及搬运装置,其特征在于,包括:
2.根据权利要求1所述的多功能机械臂加样及搬运装置,其特征在于,所述加样组件还包括:
3.根据权利要求2所述的多功能机械臂加样及搬运装置,其特征在于,所述加样安装板背离所述第三导轨的侧壁上设置有扫码枪,且所述扫码枪与所述加样安装板倾斜设置,用于扫码、识别和记录样品信息。
4.根据权利要求3所述的多功能机械臂加样及搬运装置,其特征在于,所述加样泵两侧设置有支架,所述支架与所述第三连接板固定连接,且在所述支架外壁上有用于对样品进行拍照的相机。
5.根据权利要求4所述的多功能机械臂加样及搬运装置,其特征在于,所述支架外壁上还设置有排线压片,所述加样安装板上设置有排线板,线束通过所述排线板以及所述排线压片压紧固定。
6.根据权利要求1所述的多功能机械臂加样及搬运装置,其特征在于,所述移载组件还包括:
7.根据权利要求6所述的多功能机械臂加样及搬运装置,其特征在于,所述夹爪背离所述夹爪电机的端部设置有夹取物体的夹指。
8.根据权利要求7所述的多功能机械臂加样及搬运装置,其特征在于,所述夹爪电机侧壁固定设置有压紧板,所述压紧板呈直角形设置,且在直角处设置有加强筋,所述压紧板随所述夹爪电机移动,用于实现对物体的压紧。
9.根据权利要求1-8任一项所述的多功能机械臂加样及搬运装置,其特征在于,任一组所述移动平台上设置有控制模块,所述控制模块用于控制所述第一电机以及所述第二电机的启停以及正反转运动。
10.根据权利要求9所述的多功能机械臂加样及搬运装置,其特征在于,所述平台板上设置有第一光电开关,所述移动平台上设置有用于改变所述第一光电开关状态的第一挡片,所述第一光电开关用于检测所述移动平台的运行位置,并将检测信号传输至控制模块。
11.根据权利要求10所述的多功能机械臂加样及搬运装置,其特征在于,所述平台板上设置有第一拖链,所述控制模块以及所述第一光电开关的线缆通过所述第一拖链柔性运动设置。
12.根据权利要求9所述的多功能机械臂加样及搬运装置,其特征在于,任一组所述移动平台上均设置有第二拖链,所述第二拖链用于将所述移动平台上的线束柔性运动设置。
13.根据权利要求2所述的多功能机械臂加样及搬运装置,其特征在于,所述加样安装板上设置有第二光电开关,所述第三连接板上设置有用于改变所述第二光电开关状态的第二挡片,所述第二光电开关位于所述第三导轨端部,并与所述控制单元电连接,用于控制所述第三电机的起始工作精度。
14.根据权利要求6所述的多功能机械臂加样及搬运装置,其特征在于,所述移载安装板上设置有第三光电开关,所述第三光电开关位于所述第四导轨端部,所述第四连接板上设置有用于改变所述第三光电开关状态的第三挡片,所述第三光电开关用于控制所述第四电机的起始工作精度。
15.根据权利要求13或14所述的多功能机械臂加样及搬运装置,其特征在于,所述加样安装板和/或所述移载安装板上设置有第三拖链,所述第三拖链用于将所述加样组件和/或所述移载组件的线束柔性运动设置。
技术总结
本申请公开了一种多功能机械臂加样及搬运装置,包括:装置平台;两组传动件,设置于平台板上,用于带动移动平台滑动;两组移动平台,滑动设置于平台板上,且两组移动平台分别与两个不同的传动件连接,通过传动件带动移动平台沿第一导轨做往返运动;加样组件,滑动设置于一组移动平台上,且滑动设置有加样泵,加样泵端部设置有用于取样的枪头;移载组件,滑动设置于另一组移动平台上,且滑动设置有夹爪,夹爪用于夹取载板。采用上述方式设置的装置,能够实现不停机加样和搬运多种样品工作,从而达到高效加样兼具搬运的目的。
技术研发人员:郑德雨,吴云昭,李向广,韩乐乐,蔡克亚
受保护的技术使用者:安图实验仪器(郑州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!