一种机器人定位精度检测装置的制作方法
本发明涉及机器人检测,具体为一种机器人定位精度检测装置。
背景技术:
1、工业机器人是面向工业领域的机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,机器人凭借着其动作灵活、拓展性强的特点,在各种生产线中得到了广泛的应用,机器人的运动部分在安装后需要对其位置精度进行检测,如此以保证其工作时的精度。
2、但是现有技术中的机器人进行精度检测装置多是由复杂的电子器件和激光组件组成,造价较为昂贵,操作要求高,同时对于标定纸缺乏支撑固定和平整装置,检测效率较低,也容易出现测量不准确的情况。
技术实现思路
1、基于此,本发明的目的是提供一种机器人定位精度检测装置,以解决上述背景中提出的技术问题。
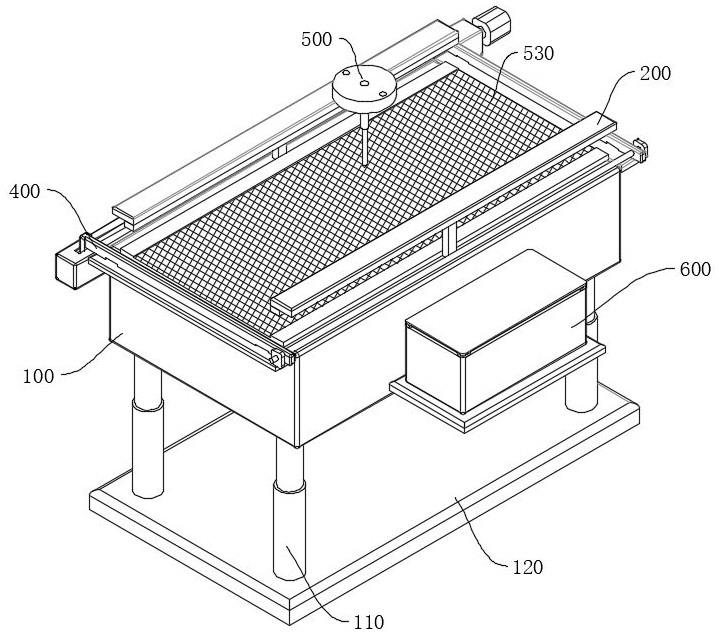
2、为实现上述目的,本发明提供如下技术方案:一种机器人定位精度检测装置,包括检测台主体,所述检测台主体底部四角设有支撑腿,每组所述支撑腿底部固定安装有底板,所述检测台主体内腔安装有固定机构,所述固定机构一侧对接有支撑机构,所述检测台主体顶部一侧安装有平整组件,所述检测台主体上方设有定位组件,所述检测台主体一侧设有收纳组件;
3、所述支撑机构包括固定在所述检测台主体内腔底部四角的伸缩杆,四组所述伸缩杆顶部固定安装有支撑板,所述支撑板底部两端均固定安装有两组l型固定杆,所述l型固定杆另一端固定有一号齿条,所述检测台主体内腔侧面转动连接有一号转轴和二号转轴,所述一号转轴外壁套设有一号齿轮和二号齿轮,所述一号齿轮与所述一号齿条相啮合,所述二号转轴外壁套设有三号齿轮,所述二号齿轮和三号齿轮相啮合,所述支撑机构包括与所述固定机构对接的固定杆,所述固定杆一端固定有二号齿条,所述二号齿条与所述三号齿轮相啮合。
4、优选的,所述检测台主体上表面开设有方形槽,所述支撑板与方形槽尺寸相匹配。
5、优选的,所述固定机构包括安装在检测台主体底部的第一电机,所述第一电机一端转动连接有螺纹丝杆,所述螺纹丝杆的一端贯穿至检测台主体的内腔中套接有移动杆,所述移动杆两端均固定安装有连接杆,所述连接杆另一端设有连接板,所述连接板底部固定安装有压板,所述连接杆与所述固定杆固定连接。
6、优选的,所述压板底部设有防滑垫。
7、优选的,所述平整组件包括固定安装在所述检测台主体顶部一侧的丝杆箱,所述丝杆箱一端安装有第二电机,所述第二电机一端转动连接有正反螺纹丝杆,所述正反螺纹丝杆贯穿于所述丝杆箱至内腔一侧,所述正反螺纹丝杆外壁两端各套设有一组滑块,每组所述滑块一侧均固定安装有平整板,所述丝杆箱上表面开设有滑槽,所述滑块与所述滑槽相卡合。
8、优选的,所述检测台主体两端均固定安装有固定板,两组所述固定板一端顶部安装有固定座,两组所述固定座之间固定安装有滑杆,两组所述平整板的一端与所述滑杆滑动连接。
9、优选的,所述定位组件包括放置在检测台主体上表面的标定纸,所述检测台主体上方设有安装座,所述安装座底部固定安装有标定针。
10、优选的,所述收纳组件包括固定在所述检测台主体一侧的固定底板,所述固定底板顶部安装有收纳箱,所述收纳箱顶部设有盖板,所述收纳箱顶部四角处安装有阴极磁石,所述盖板底部四角安装有阳极磁石。
11、综上所述,本发明主要具有以下有益效果:
12、本发明通过设计支撑机构,利用支撑机构中的伸缩杆、支撑板、l型固定杆、一号齿条、一号转轴、一号齿轮、二号齿轮、二号转轴、三号齿轮、固定杆、二号齿条之间的相互配合,一号齿条向下移动,三号齿轮转动一圈可带动二号齿轮转动数圈,从而带动与二号齿轮固定的一号转轴转动,带动一号转轴上固定的另一组一号齿轮转动,进而带动l型固定杆另一端固定的支撑板向下移动,解除了对标定纸的支撑,提高了检测装置的便捷性,进而提高检测效率;
13、本发明通过平整组件,利用平整组件中的第二电机、正反螺纹丝杆、滑块、平整板、固定板、固定座、滑杆之间的相互配合,两组滑块带动平整板相对滑动,对标定纸进行平整,防止标定纸出现褶皱,提高检测精准度;
14、本发明通过设计固定机构,利用固定机构中的第一电机、螺纹丝杆、移动杆、连接杆、连接板、压板之间的相互配合,带动连接杆固定的连接板以及压板随之下降,使得压板将标定纸两端固定实现了对标定纸的固定,从而提高检测准度。
技术特征:
1.一种机器人定位精度检测装置,包括检测台主体(100),其特征在于:所述检测台主体(100)底部四角设有支撑腿(110),每组所述支撑腿(110)底部固定安装有底板(120),所述检测台主体(100)内腔安装有固定机构(200),所述固定机构(200)一侧对接有支撑机构(300),所述检测台主体(100)顶部一侧安装有平整组件(400),所述检测台主体(100)上方设有定位组件(500),所述检测台主体(100)一侧设有收纳组件(600);
2.根据权利要求1所述的一种机器人定位精度检测装置,其特征在于:所述检测台主体(100)上表面开设有方形槽,所述支撑板(320)与方形槽尺寸相匹配。
3.根据权利要求1所述的一种机器人定位精度检测装置,其特征在于:所述固定机构(200)包括安装在检测台主体(100)底部的第一电机(210),所述第一电机(210)一端转动连接有螺纹丝杆(220),所述螺纹丝杆(220)的一端贯穿至检测台主体(100)的内腔中套接有移动杆(230),所述移动杆(230)两端均固定安装有连接杆(240),所述连接杆(240)另一端设有连接板(250),所述连接板(250)底部固定安装有压板(260),所述连接杆(240)与所述固定杆(3910)固定连接。
4.根据权利要求3所述的一种机器人定位精度检测装置,其特征在于:所述压板(260)底部设有防滑垫。
5.根据权利要求1所述的一种机器人定位精度检测装置,其特征在于:所述平整组件(400)包括固定安装在所述检测台主体(100)顶部一侧的丝杆箱(410),所述丝杆箱(410)一端安装有第二电机(420),所述第二电机(420)一端转动连接有正反螺纹丝杆(430),所述正反螺纹丝杆(430)贯穿于所述丝杆箱(410)至内腔一侧,所述正反螺纹丝杆(430)外壁两端各套设有一组滑块(440),每组所述滑块(440)一侧均固定安装有平整板(450),所述丝杆箱(410)上表面开设有滑槽(411),所述滑块(440)与所述滑槽(411)相卡合。
6.根据权利要求5所述的一种机器人定位精度检测装置,其特征在于:所述检测台主体(100)两端均固定安装有固定板(460),两组所述固定板(460)一端顶部安装有固定座(470),两组所述固定座(470)之间固定安装有滑杆(480),两组所述平整板(450)的一端与所述滑杆(480)滑动连接。
7.根据权利要求1所述的一种机器人定位精度检测装置,其特征在于:所述定位组件(500)包括放置在检测台主体(100)上表面的标定纸(530),所述检测台主体(100)上方设有安装座(510),所述安装座(510)底部固定安装有标定针(520)。
8.根据权利要求1所述的一种机器人定位精度检测装置,其特征在于:所述收纳组件(600)包括固定在所述检测台主体(100)一侧的固定底板(610),所述固定底板(610)顶部安装有收纳箱(620),所述收纳箱(620)顶部设有盖板(630),所述收纳箱(620)顶部四角处安装有阴极磁石(640),所述盖板(630)底部四角安装有阳极磁石(650)。
技术总结
本发明公开了一种机器人定位精度检测装置,涉及机器人检测技术领域,包括检测台主体,所述检测台主体底部四角设有支撑腿,每组所述支撑腿底部固定安装有底板,所述检测台主体内腔安装有固定机构。本发明通过设计支撑机构,利用支撑机构中的伸缩杆、支撑板、L型固定杆、一号齿条、一号转轴、一号齿轮、二号齿轮、二号转轴、三号齿轮、固定杆、二号齿条之间的相互配合,三号齿轮转动一圈可带动二号齿轮转动数圈,从而带动与二号齿轮固定的一号转轴转动,带动一号转轴上固定的另一组一号齿轮转动,进而带动L型固定杆另一端固定的支撑板向下移动,解除了对标定纸的支撑,提高了检测装置的便捷性,进而提高检测效率。
技术研发人员:付振明
受保护的技术使用者:沈阳格熙科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!