危险电力场景下电力设备状态探测机器人的制作方法
本发明涉及电力检测领域,尤其涉及一种用于危险电力场景下电力设备状态探测的机器人。
背景技术:
1、通过利用巡检机器人进行定期巡检,可以发现由于设备故障、线路老化、电气部件松动等问题产生的安全隐患,通过消除安全隐患维持电力场景的稳定。
2、但是,在电力场景已经由稳定的电力场景转变为危险电力场景的情况下,往往还需要技术人员进入危险电力场景内,查看电力设备中放电设备的放电状态,以确认维修方案,但是在还不确定放电设备的放电情况下,技术人员进入危险电力场景,存在一定的风险。
技术实现思路
1、针对于现有的技术问题,本发明提供一种用于危险电力场景下电力设备状态探测的机器人。通过在车体上安装特高频传感器,进而检测危险电力场景的放电状态。
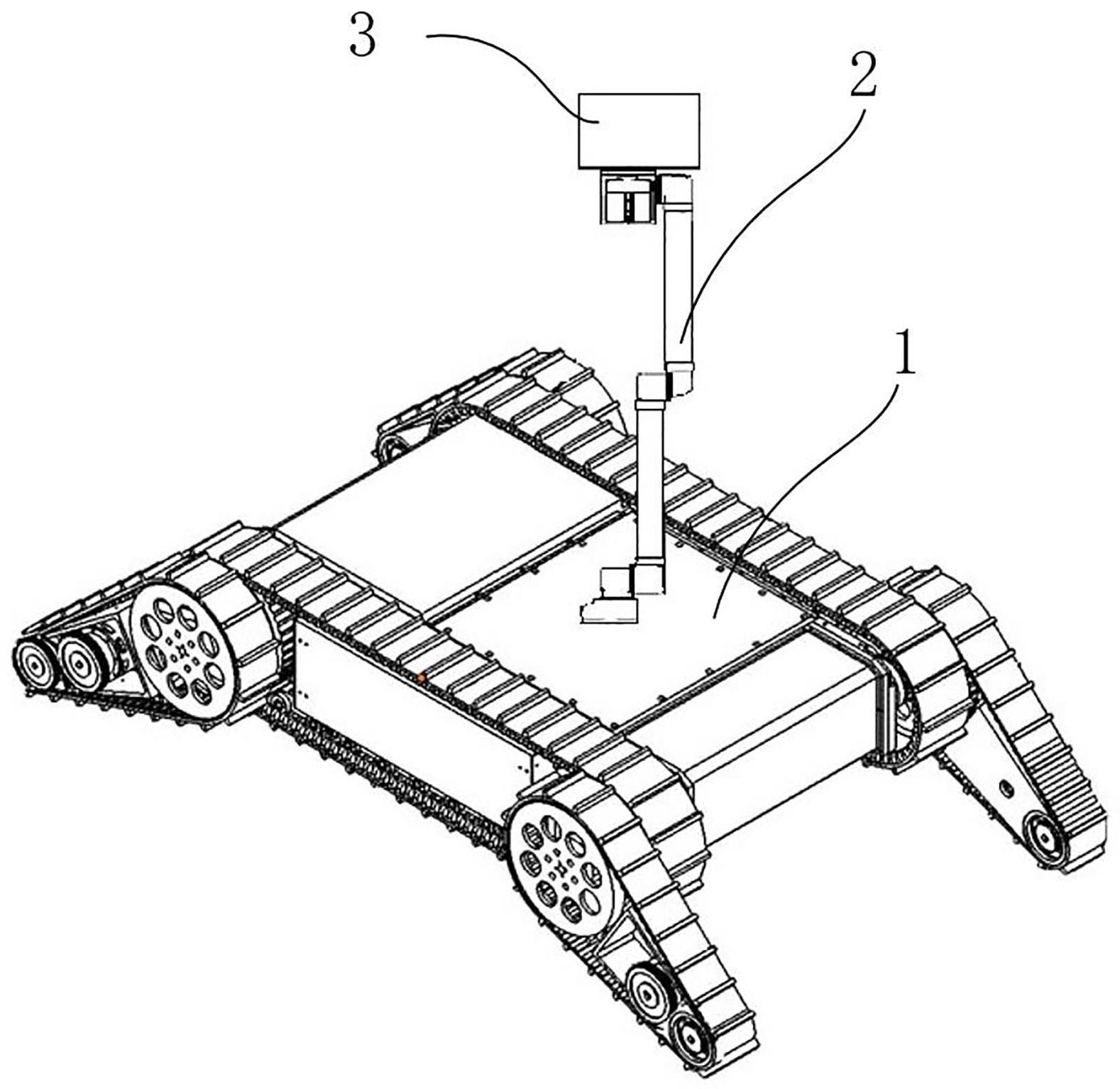
2、本发明提供一种危险电力场景下电力设备状态探测机器人,包括:车体;机械臂,一端安装在上述车体上方,上述车体带动上述机械臂移动;以及探测装置,安装在上述机械臂的另一端上,上述探测装置包括特高频传感器,在上述车体带动上述探测装置靠近危险电力场景中的电力设备的情况下,上述机械臂带动上述特高频传感器与上述电力设备中的放电设备接触,进而获取上述电力设备的放电数据。
3、可选的,上述机械臂包括:多个连杆,相邻上述连杆之间转动连接,通过控制上述连杆转动的角度,带动上述特高频传感器与上述放电设备接触。
4、可选的,上述探测装置还包括:安装座,上述特高频传感器可拆卸的安装在上述安装座上;热成像传感器,安装在上述安装座上,上述热成像传感器被配置为获取上述危险电力场景的第一图像数据;以及音频传感器,安装在上述安装座上,上述音频传感器被配置为获取上述危险电力场景的音频数据。
5、可选的,上述特高频传感器包括:凹槽,形成在上述特高频传感器远离上述放电设备的一侧,上述凹槽与上述安装座上的卡扣配合,以将上述特高频传感器固定在上述安装座上。
6、可选的,上述车体包括:底盘;以及两个行走机构,分别设置在上述底盘两侧,每个上述行走机构包括:支撑架;第一电机,安装在上述支撑架上;行走主动轮,安装在上述支撑架上,并与上述第一电机的输出轴连接;以及行走从动轮,安装在上述支撑架上,与上述行走主动轮传动连接。
7、可选的,两个上述第一电机基于底盘的中心对称设置,以使上述车体的重心位于上述车体的中心。
8、可选的,上述车体还包括摆臂机构,上述摆臂机构包括:两个第一摆臂,安装在上述底盘的前端并位于行走机构的两侧,其中一个上述第一摆臂与其中一个上述行走机构的行走主动轮同轴连接,另一个上述第一摆臂与另一个上述行走机构的行走从动轮同轴转动连接;以及两个第二摆臂,安装在上述底盘的后端并位于行走机构的两侧,其中一个上述第二摆臂与其中一个上述行走机构的行走主动轮同轴连接,另一个上述第二摆臂与另一个上述行走机构的行走从动轮同轴转动连接。
9、可选的,危险电力场景下电力设备状态探测机器人还包括:两个摄像装置,分别安装在上述车体的前端和后端,上述摄像装置被配置为获取上述危险电力场景的第二图像数据。
10、可选的,危险电力场景下电力设备状态探测机器人还包括:处理器,安装在上述探测装置上,上述处理器被配置为基于上述第一图像数据、上述第二图像数据、上述音频数据和上述放电数据控制上述机械臂中各连杆转动的角度。
11、可选的,上述处理器基于上述第一图像数据、上述第二图像数据、上述音频数据和上述放电数据控制上述第一摆臂和/或上述第二摆臂摆动的角度。
12、根据本发明实施例,通过在车体上设置机械臂,并在机械臂上设置探测装置,可以带动探测装置进入危险电力场景,通过在探测装置上安装特高频传感器,可以控制特高频传感器与电力设备中的放电设备接触,进而获取电力设备的放电数据,无需技术人员进入危险电力场景内,即可获取危险电力场景的放电状态,可以提高危险电力场景检测的安全性和准确性。
技术特征:
1.一种危险电力场景下电力设备状态探测机器人,其特征在于,包括:
2.根据权利要求1所述的危险电力场景下电力设备状态探测机器人,其特征在于,所述机械臂包括:
3.根据权利要求2所述的危险电力场景下电力设备状态探测机器人,其特征在于,所述探测装置还包括:
4.根据权利要求1所述的危险电力场景下电力设备状态探测机器人,其特征在于,所述车体包括:
5.根据权利要求4所述的危险电力场景下电力设备状态探测机器人,其特征在于,两个所述第一电机基于所述底盘的中心对称设置,以使所述车体的重心位于所述车体的中心。
6.根据权利要求5所述的危险电力场景下电力设备状态探测机器人,其特征在于,所述车体还包括摆臂机构,所述摆臂机构包括:
7.根据权利要求3所述的危险电力场景下电力设备状态探测机器人,其特征在于,还包括:两个摄像装置,分别安装在所述车体的前端和后端,所述摄像装置被配置为获取所述危险电力场景的第二图像数据。
8.根据权利要求7所述的危险电力场景下电力设备状态探测机器人,其特征在于,还包括:
9.根据权利要求8所述的危险电力场景下电力设备状态探测机器人,其特征在于,所述处理器基于所述第一图像数据、所述第二图像数据、所述音频数据和所述放电数据控制所述第一摆臂和/或所述第二摆臂摆动的角度。
技术总结
本发明提供一种危险电力场景下电力设备状态探测机器人,包括:车体;机械臂,一端安装在车体上方,车体带动机械臂移动;探测装置,安装在机械臂的另一端上,探测装置包括安装座;特高频传感器,可拆卸的安装在安装座上,在车体带动探测装置靠近危险电力场景中的电力设备的情况下,机械臂带动特高频传感器与放电设备接触,进而检测电力设备的放电数据;特高频传感器包括凹槽;卡扣包括:定压块和调整座,分别设置在安装座上;动压块,设置在定压块和调整座之间,动压块和定压块形成有相对设置的凸起,通过凸起与凹槽的配合将特高频传感器安装在安装座上;调整杆,与调整座连接,通过转动调整杆,固定或拆卸特高频传感器。
技术研发人员:杨磊,贺春,李松原,王鑫峰,苗树国,张玉涛,郭俊龙,张黎明,宫博仁,李旭,黄朝,李博,姚颖,梁刚,黄天诚
受保护的技术使用者:国网天津市电力公司电力科学研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!