一种电力机器人多传感器融合模块的制作方法
本发明属于电力机器人,尤其是一种电力机器人多传感器融合模块。
背景技术:
1、电力设备在运行维护过程中,常常需要确认电力设备的状态,特别是当电力设备存在安全隐患时,需要由机器人搭载相关的传感器前往设备附近进行探测。一般机器人搭载的传感器主要以视频、声音等为主,其他还有如红外、有害气体等传感器,机器人搭载的传感器数量越多,设计难度就越大,因为要考虑重量、体积、信号融合等问题。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提出一种电力机器人多传感器融合模块,通过将特高频传感器、音频传感器和红外传感器更加合理紧凑地布置于专用外壳内,并可通过快拆装置更换不同各类的特高频传感器,统一了供电方式和信号输出方式,可以更好地适应电力机器人对机械臂末端传感器功能全面且小巧的要求。
2、本发明解决其技术问题是采取以下技术方案实现的:
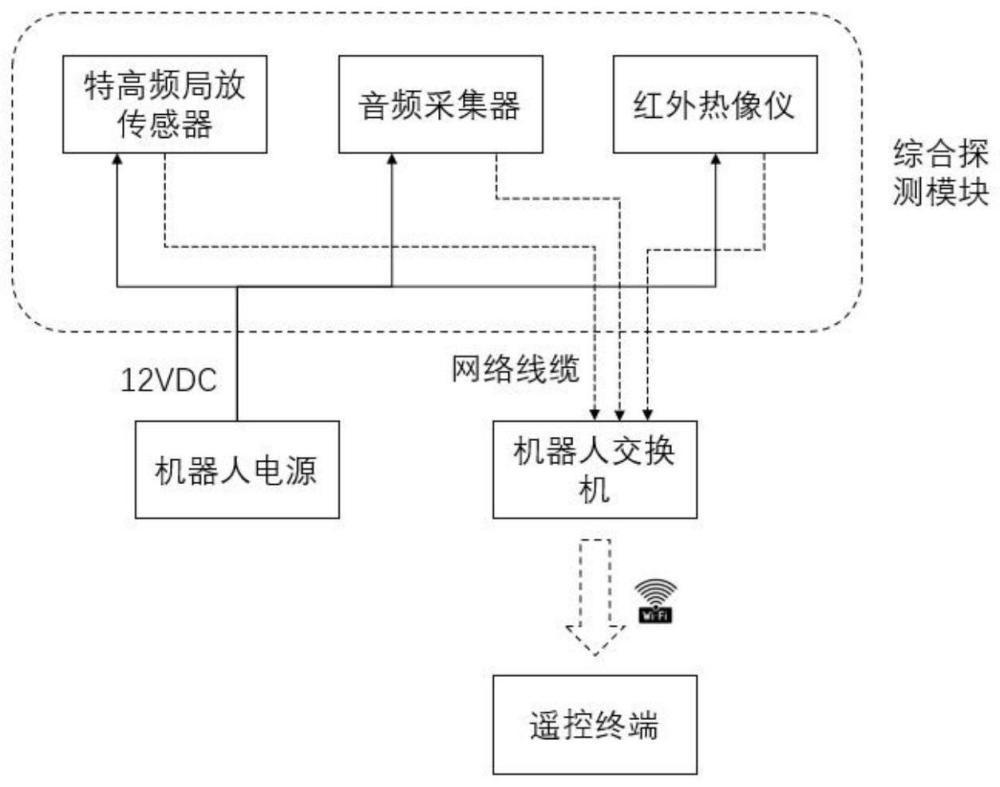
3、一种电力机器人多传感器融合模块,安装在电力机器人上,包括外壳、特高频传感器、音频采集器和红外传感器,其中,特高频传感器、音频采集器和红外传感器安装在外壳上,特高频传感器、音频采集器和红外传感器分别连接机器人的电源,特高频传感器、音频传感器和红外传感器分别通过网络线缆连接机器人交换机,机器人交换机通过无线网络与遥控终端建立网络连接,特高频传感器数据在遥控终端以图谱的形式绘制,音频采集器采集的音频数据在遥控终端由音频播放器进行播放,红外热像仪采集的数据在遥控终端以连续播放的热图形式呈现。
4、而且,所述外壳包括传感器安装座和机械臂连接座,其中特高频传感器、音频采集器和红外传感器安装在传感器安装座表面上,传感器安装座的通过螺钉连接机械臂连接座,机械臂连接座通过销轴连接机器人末端的连接轴。
5、而且,所述特高频传感器包括平面式特高频传感器和弧面式特高频传感器,其中平面式特高频传感器用于测量开关柜形式的平面设备,弧面式特高频传感器用于测量gis管道形式的弧面设备。
6、而且,所述特高频传感器的表面置出连接平台,连接平台与高频传感器的表面的连接处为v型槽,特高频传感器通过连接平台和快拆机构固定在外壳上。
7、而且,所述快拆机构包括定压块、动压块、调整座、导向杆、调整杆和弹簧,其中,定压块通过螺钉固定在传感器安装座上,调整座通过螺钉固定在传感器安装座上,调整座设两个导向通孔和一个调整螺纹孔,弹簧设置在导向杆上,导向杆穿过导向孔,导向杆的一端与动压块相连,导向杆的另一端通过压缩弹簧与调整座相连,调整杆上设螺纹,调整杆与调整螺纹孔耦合相连,定压块和动压块设有v形接触面并与特高频传感器v形槽耦合。
8、本发明的优点和积极效果是:
9、本发明通过特高频传感器、音频采集器和红外传感器安装在外壳上构成电力机器人专用多传感器探测模块。并且本发明通过将特高频传感器、音频传感器和红外传感器更加合理紧凑地布置于专用外壳内,同时可通过快拆装置更换不同各类的特高频传感器,统一了供电方式和信号输出方式,可以更好地适应电力机器人对机械臂末端传感器功能全面且小巧的要求。本发明与现有技术相比缩小了体积和重量,同时不同于现有的分散化布局,使布局更加集中,可以作为机械臂末端执行器来执行探测任务,优化了机器人方案布局。
技术特征:
1.一种电力机器人多传感器融合模块,安装在电力机器人上,其特征在于:包括外壳、特高频传感器、音频采集器和红外传感器,其中,特高频传感器、音频采集器和红外传感器安装在外壳上,特高频传感器、音频采集器和红外传感器分别连接机器人的电源,特高频传感器、音频传感器和红外传感器分别通过网络线缆连接机器人交换机,机器人交换机通过无线网络与遥控终端建立网络连接,特高频传感器数据在遥控终端以图谱的形式绘制,音频采集器采集的音频数据在遥控终端由音频播放器进行播放,红外热像仪采集的数据在遥控终端以连续播放的热图形式呈现。
2.根据权利要求1所述的一种电力机器人多传感器融合模块,其特征在于:所述外壳包括传感器安装座和机械臂连接座,其中特高频传感器、音频采集器和红外传感器安装在传感器安装座表面上,传感器安装座通过螺钉连接机械臂连接座,机械臂连接座通过销轴连接机器人末端的连接轴。
3.根据权利要求1所述的一种电力机器人多传感器融合模块,其特征在于:所述特高频传感器包括平面式特高频传感器和弧面式特高频传感器,其中平面式特高频传感器用于测量开关柜形式的平面设备,弧面式特高频传感器用于测量gis管道形式的弧面设备。
4.根据权利要求1所述的一种电力机器人多传感器融合模块,其特征在于:所述特高频传感器的表面置出连接平台,连接平台与高频传感器的表面的连接处为v型槽,特高频传感器通过连接平台和快拆机构固定在外壳上。
5.根据权利要求4所述的一种电力机器人多传感器融合模块,其特征在于:所述快拆机构包括定压块、动压块、调整座、导向杆、调整杆和弹簧,其中,定压块通过螺钉固定在传感器安装座上,调整座通过螺钉固定在传感器安装座上,调整座设两个导向通孔和一个调整螺纹孔,弹簧设置在导向杆上,导向杆穿过导向孔,导向杆的一端与动压块相连,导向杆的另一端通过压缩弹簧与调整座相连,调整杆上设螺纹,调整杆与调整螺纹孔耦合相连,定压块和动压块设有v形接触面并与特高频传感器v形槽耦合。
技术总结
本发明涉及一种电力机器人多传感器融合模块,通过特高频传感器、音频采集器和红外传感器安装在外壳上构成电力机器人专用多传感器探测模块。并且本发明通过将特高频传感器、音频传感器和红外传感器更加合理紧凑地布置于专用外壳内,同时可通过快拆装置更换不同各类的特高频传感器,统一了供电方式和信号输出方式,可以更好地适应电力机器人对机械臂末端传感器功能全面且小巧的要求。本发明与现有技术相比缩小了体积和重量,同时不同于现有的分散化布局,使布局更加集中,可以作为机械臂末端执行器来执行探测任务,优化了机器人方案布局。
技术研发人员:杨磊,李松原,苗树国,王鑫峰,贺春,张黎明,张玉涛,郭俊龙,宫博仁,黄朝,梁刚,李博,姚颖,黄天诚,李旭
受保护的技术使用者:国网天津市电力公司电力科学研究院
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!