一种工业机器人轨迹规划方法及控制器与流程
本申请涉及机器人运动规划,特别涉及一种工业机器人轨迹规划方法及控制器。
背景技术:
1、轨迹规划是机器人控制系统研究的重要内容之一,机器人运动过程中的轨迹平滑性是衡量机器人运动规划性能的重要指标,它对机器人性能的提高起着关键性的作用。因此,机器人的轨迹规划问题也是机器人的研究重点。
2、机器人的轨迹规划包括笛卡尔空间轨迹规划和关节空间轨迹规划。通常,为保证机器人的轨迹平滑,工业机器人常采用s型速度规划或者梯形速度规划方法。机器人轨迹规划常用方法s型曲线规划方法,如文献《六自由度机器人s型曲线速度规划[j]》(刘蕾,曾辉,柳贺,等.计算机技术与自动化,2015,34(2):42-45),相比于梯形轨迹规划方式,保证了机器人路径上加速度连续,但是路径上的加加速度曲线仍然不连续,依然会带来机械上的冲击。其他常用的轨迹规划方式有《基于正弦加减速控制算法的工业机器人位姿轨迹规划研究[j]》(黄忠明,陈爱文,黄凤良.制造业自动化,2019,041(002):31-34)中的正弦加减速控制算法,虽然保证了加速度、加加速度曲线在启动阶段、匀速运行阶段及停止阶段间光滑过渡,但是在减加速度段还不够平缓,这种规划方法在机器人的停止阶段对本体仍有一定的冲击。
技术实现思路
1、本申请提供了一种工业机器人轨迹规划方法及控制器,其优点是通过调整工业机器人轨迹规划中各个阶段的占比,尤其是减速段的占比,从而降低整个运动过程中由轨迹规划带来的对机器人本体的冲击。
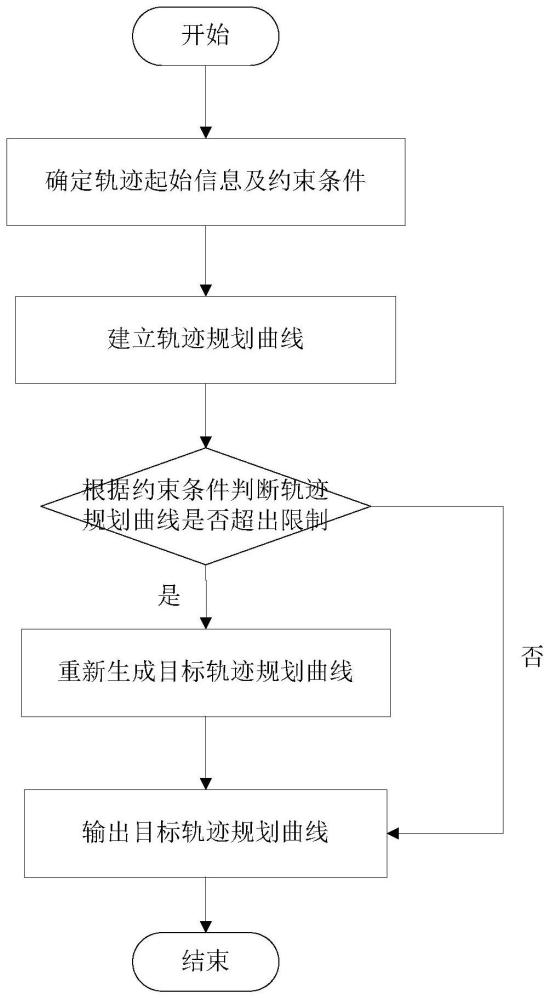
2、一方面,本申请提供一种工业机器人轨迹规划方法,包括以下步骤:
3、获取工业机器人运动轨迹相关参数,包括轨迹的起始位移s0、速度v0、加速度a0,终止位移se、速度ve以及加速度ae,设定轨迹速度、轨迹加速度、轨迹加加速度的约束条件;
4、划分机器人的轨迹模型:将机器人的轨迹模型分为5个阶段s1-s5,分别为加速段包括加加速度阶段s1和减加速度阶段s2,匀速段包括匀速段s3、减速段包括加加速度段s4以及减加速度段s5;
5、根据轨迹模型建立加速度规划模型:对5个阶段的机器人轨迹模型建立分段的加速度规划模型;
6、根据约束条件求解轨迹最优参数:判断速度、加速度、加加速度函数规划曲线是否满足约束条件,若否,重新计算;
7、生成机器人运动轨迹:对加速度公式重新积分得到轨迹位置规划模型。
8、进一步的,机器人轨迹模型的加速度规划模型采用指数加速度函数,加速度规划模型分段指数加速度函数的公式为:
9、
10、其中,aacc和adec分别为轨迹加加速度最值和减加速度最值,t3为加加速度段起始时间,t5为减加速度段停止时间,μ和σ分别为加加速度段结束时间和比例系数;对加速度公式推导得到位置、速度以及加加速度分段函数公式,将给定的轨迹参数条件代入计算求得等式中未知参数的值,得到的轨迹位置、速度、加速度和加加速度的分段函数轨迹公式。
11、进一步的,机器人的运动轨迹通过以下条件确定:
12、s(t0)=0,
13、s(te)=se,
14、其中t0为轨迹s起始时刻,te为轨迹s终止时刻,为轨迹路径速度,为轨迹路径加速度,为轨迹路径加加速度。
15、进一步的,所述机器人的轨迹模型按照时间顺序分为:
16、
17、进一步的,所述轨迹速度、轨迹加速度、轨迹加加速度的约束条件包括最大轨迹速度vmax、最大轨迹加速度amax、最大轨迹加加速度jmax,其中,
18、
19、进一步的,当计算出的aacc或adec大于|amax|,另aacc或adec的值等于|amax|,代入公式(1)中重新计算;
20、当计算出的加加速度的值大于jmax,令加加速度的值等于jmax重新计算加速度参数的值。
21、另一方面,本申请提供一种工业机器人控制器,包括存储器和处理器,所述存储器用于存储计算机程序,所述处理调用并运行存储器中存储的计算机程序时,执行上述的工业机器人轨迹规划方法。
22、综上所述,本申请的有益效果有:
23、1.本申请提出的基于分段函数的加速度规划方法,可以通过调节工业机器人轨迹规划中各个阶段的占比,尤其是减速段的占比,通过调节减速段的占比来改变加速度的极值,减速段占比越大,加速度的最大值就会越小,从而降低整个运动过程中由轨迹规划带来的对机器人本体的冲击;
24、2.本申请在分段基础上提出的指数函数工业机器人轨迹规划方法,相较于常用的梯形规划和s型轨迹规划模型,指数函数规划运动曲线更加平滑,可以保证轨迹起止点间位置、速度、加速度和加加速度均连续,机器人运行过程更加平稳。
技术特征:
1.一种工业机器人轨迹规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的工业机器人轨迹规划方法,其特征在于,机器人轨迹模型的加速度规划模型采用指数加速度函数,加速度规划模型分段指数加速度函数的公式为:
3.根据权利要求1所述的工业机器人轨迹规划方法,其特征在于,机器人的运动轨迹通过以下条件确定:
4.根据权利要求1所述的工业机器人轨迹规划方法,其特征在于,所述机器人的轨迹模型按照时间顺序分为:
5.根据权利要求2所述的工业机器人轨迹规划方法,其特征在于,所述轨迹速度、轨迹加速度、轨迹加加速度的约束条件包括最大轨迹速度vmax、最大轨迹加速度amax、最大轨迹加加速度jmax,其中,
6.根据权利要求5所述的工业机器人轨迹规划方法,其特征在于,当计算出的aacc或adec大于|amax|,令aacc或adec的值等于|amax|,代入公式(1)中重新计算;
7.一种工业机器人控制器,其特征在于,包括存储器和处理器,所述存储器用于存储计算机程序,所述处理调用并运行存储器中存储的计算机程序时,执行如权利要求1-6任意一项所述的方法。
技术总结
本申请公开了一种工业机器人轨迹规划方法及控制器,方法包括以下步骤:获取工业机器人运动轨迹相关参数,确定轨迹起始信息及约束条件;划划分机器人的轨迹模型并根据轨迹模型建立加速度规划模型;根据约束条件求解轨迹最优参数,对加速度公式重新积分得到轨迹位置规划模型。其中,采用分段指数型轨迹规划方法对机器人轨迹进行规划。本申请优点是通过调整工业机器人轨迹规划中各个阶段的占比,尤其是减速段的占比,从而降低整个运动过程中由轨迹规划带来的对机器人本体的冲击。
技术研发人员:夏颖,王继虎,汪允鹤
受保护的技术使用者:南京埃斯顿机器人工程有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!