一种煤堆深层测温机器人的控制方法与流程
本发明涉及测温,更确切地说,它涉及一种煤堆深层测温机器人的控制方法。
背景技术:
1、目前发电厂都将发电用的煤堆放在开放或者封闭的仓库中,煤堆因内部氧化释放热量,容易发生内部自燃,故而定时监测煤堆内部的温度以防自燃十分重要,但煤堆仓库面积巨大,环境恶劣,通过人工的方式获得煤堆内部温度耗时又费力。
2、目前已有的技术,包括人工手持红外传感器获得煤堆表面温度、使用巡检机器人或无人机拍摄图片获得煤堆表面温度,以及使用巡检机器人搭载测温杆探测煤堆内部的温度等。在已有的这些技术中,大多是基于硬件的设计构建一个能完成煤堆测温的机器人实体,或者是基于若干实体构建一个监控的系统,而关于控制各个子模块与传感器完成煤堆测温的控制方法,目前还没有专利提及。
技术实现思路
1、本发明的目的是针对现有技术的不足,提出了一种煤堆深层测温机器人的控制方法。
2、第一方面,提供了一种煤堆深层测温机器人,包括:
3、底盘、测温杆、3d激光雷达、可见光摄像头、红外摄像头、有害气体传感器和工控机;
4、所述可见光摄像头提供机器人正前方的实时视频流;所述红外摄像头提供视场角范围内的物体实时表面温度;所述激光雷达在机器人运动时,实时扫描周围的障碍信息;所述有害气体传感器实时获取测温机器人所处环境中的各种气体的浓度。
5、作为优选,所述激光雷达具备水平方向270°以上、垂直方向70°以上的视场角范围。
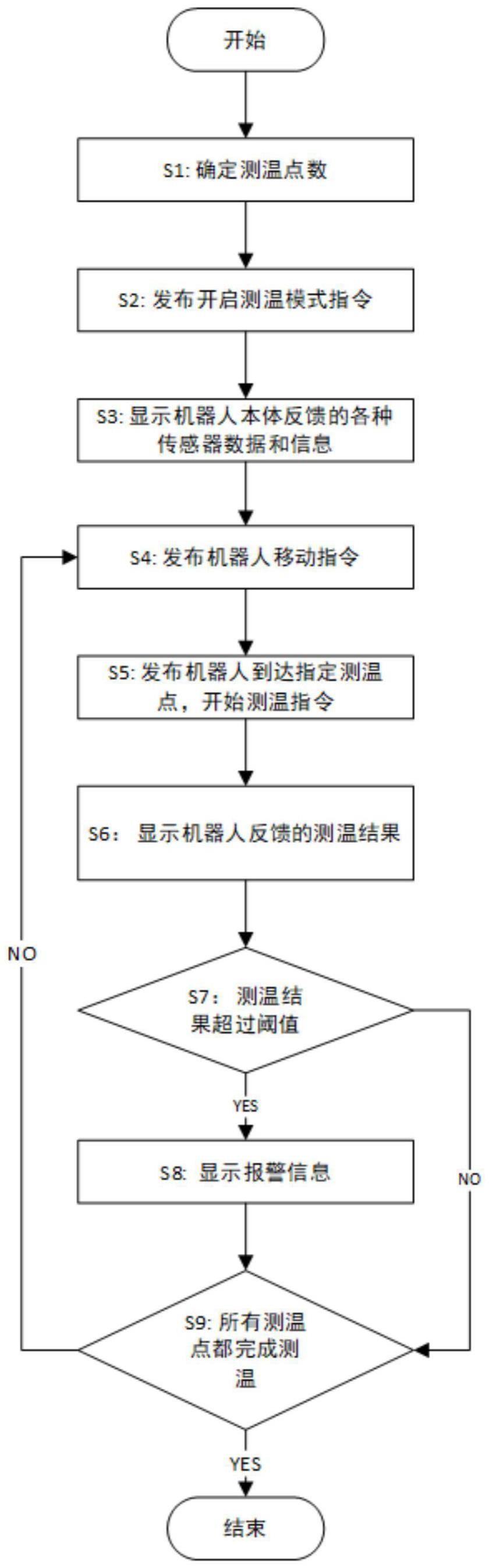
6、第二方面,提供了如第一方面所述煤堆深层测温机器人的控制方法,由客户端执行,包括:
7、s1、确定测温点数;
8、s2、发布开始测温模式的指令;
9、s3、显示机器人反馈的传感器信息,包括可见光视频流、红外视频流和障碍信息;
10、s4、发布机器人移动指令,驱动机器人到达测温点;
11、s5、用户判断机器人到达指定测温点后,发布开始测温指令;
12、s6、显示机器人反馈的测温结果;
13、s7、判断反馈的温度值是否超过了既定的阈值;
14、s8、如果反馈的温度值超过了阈值,则在界面上显示告警信息;
15、s9、判断是否完成了所有测温点的温度测量,若未完成,则返回到s4,进行下一测温点的测温操作,直至完成所有点的测温,并发布结束测温模式指令,结束整个测温流程。
16、作为优选,s4中,客户端定时多次发送机器人移动指令。
17、作为优选,s6中,客户端保存了每次机器人反馈的测温结果数据,并提供获取历次测温数据的接口。
18、第三方面,提供了一种如第一方面所述煤堆深层测温机器人的控制方法,由机器人执行,包括:
19、s1、接收来自客户端的测温指令;
20、s2、启动各种传感器的驱动,同时,开启可见光和红外的线程,实时往客户端传递相关视频流,并在本地执行视频流分析操作,判断是否有告警信息要传输到客户端;
21、s3、接收机器人移动指令,并根据指令和环境情况,选择执行或丢弃相关指令;
22、s4、到达指定测温点后,接收开始测温指令;
23、s5、驱动测温杆进行测温操作;
24、s6、向客户端反馈测温过程中所测量到的最高温度;
25、s7、判断是否收到来自客户端的结束测温模式的指令,若否,说明还有其他测温点待测量,则回到s3,继续执行测温相关操作;若是,则关闭传感器,结束整个测温流程。
26、作为优选,s2中,在启动可见光摄像头时,同时启动一个定时器,每隔一个时间间隔,从摄像头里取一张图像,然后将图片进行烟雾检测,如果检测结果有白烟,则进行报警处理,将当前的白烟图像及巡检机器人的位置上报到后台;
27、在启动红外摄像头时,启动一个定时器,每隔一个时间间隔,从摄像头里取一张红外图像,根据图像的热力情况,判断是否有超出阈值的部位,若有,则进行报警处理,将当前的红外图像及巡检机器人的位置上报到后台;
28、在启动激光雷达时,同步基于激光雷达障碍数据筛选算法,进行有效障碍数据筛选,用以辅助机器人前进。
29、作为优选,s3中,机器人遍历筛选出来的有效激光雷达点云数据,取出每个点云的空间坐标,计算其在水平面上与机器人的欧式距离,当某个数据点与机器人的欧氏距离小于既定的阈值,则丢弃远程下发的该方向上速度指令,并反馈丢弃原因,表明该方向禁止运动以避免碰撞发生,但允许反方向的速度指令执行,以扩大底盘与障碍物的距离。
30、作为优选,机器人和客户端基于websocket协议进行指令和数据传输,指令和数据传输遵循json格式。
31、本发明的有益效果是:
32、1.本发明远程控制测温机器人测温,远程即可看到相关视角和环境信息,使用者不需要进入恶劣的煤堆环境即可获得煤堆内部温度和周围环境数据。
33、2.本发明数据记录工作由客户端完成,无需人工进行数据记录,简化了数据持久化的过程。
34、3.本发明使用激光雷达辅助避障,激光雷达能感知周围空间的环境,捕获最近的障碍,协助避障,可识别空间范围内的障碍。
技术特征:
1.一种煤堆深层测温机器人,其特征在于,包括底盘、测温杆、3d激光雷达、可见光摄像头、红外摄像头、有害气体传感器和工控机;
2.根据权利要求1所述的煤堆深层测温机器人,其特征在于,所述激光雷达具备水平方向270°以上、垂直方向70°以上的视场角范围。
3.一种如权利要求1所述煤堆深层测温机器人的控制方法,其特征在于,由客户端执行,包括:
4.根据权利要求3所述的煤堆深层测温机器人的控制方法,其特征在于,s4中,客户端定时多次发送机器人移动指令。
5.根据权利要求4所述的煤堆深层测温机器人的控制方法,其特征在于,s6中,客户端保存了每次机器人反馈的测温结果数据,并提供获取历次测温数据的接口。
6.一种如权利要求1所述煤堆深层测温机器人的控制方法,其特征在于,由机器人执行,包括:
7.根据权利要求6所述的煤堆深层测温机器人的控制方法,其特征在于,s2中,在启动可见光摄像头时,同时启动一个定时器,每隔一个时间间隔,从摄像头里取一张图像,然后将图片进行烟雾检测,如果检测结果有白烟,则进行报警处理,将当前的白烟图像及巡检机器人的位置上报到后台;
8.根据权利要求7所述的煤堆深层测温机器人的控制方法,其特征在于,s3中,机器人遍历筛选出来的有效激光雷达点云数据,取出每个点云的空间坐标,计算其在水平面上与机器人的欧式距离,当某个数据点与机器人的欧氏距离小于既定的阈值,则丢弃远程下发的该方向上速度指令,并反馈丢弃原因,表明该方向禁止运动以避免碰撞发生,但允许反方向的速度指令执行,以扩大底盘与障碍物的距离。
9.根据权利要求8所述的煤堆深层测温机器人的控制方法,其特征在于,机器人和客户端基于websocket协议进行指令和数据传输,指令和数据传输遵循json格式。
技术总结
本发明涉及一种煤堆深层测温机器人的控制方法,包括:确定测温点数;发布开始测温模式的指令;显示机器人反馈的传感器信息;发布机器人移动指令,驱动机器人到达测温点;用户判断机器人到达指定测温点后,发布开始测温指令;显示机器人反馈的测温结果;判断反馈的温度值是否超过了既定的阈值;判断是否完成了所有测温点的温度测量,若未完成,则进行下一测温点的测温操作,直至完成所有点的测温,并发布结束测温模式指令,结束整个测温流程。本发明的有益效果是:本发明远程控制测温机器人测温,远程即可看到相关视角和环境信息,使用者不需要进入恶劣的煤堆环境即可获得煤堆内部温度和周围环境数据。
技术研发人员:徐燕君,李炳辰,林清,高峰,陈杰敏,王战,俞荣栋
受保护的技术使用者:浙江浙能数字科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!