提升关节峰值速度的控制方法、机器人及电子设备与流程
本发明涉及机器人,更具体地说,涉及一种提升关节峰值速度的控制方法、机器人及电子设备。
背景技术:
1、近年来,串联弹性驱动器(serial elastic actuator,sea)在服务机器人、协作机器人、外骨骼机器人及人形机器人中的应用越来越广。通过在动力的输出端串联机械柔性部件,可以提升与环境交互的柔顺性,有效缓解冲击。柔性部件本身具有储能特性,在适当时机释放能量,可以提升关节的峰值速度,产生爆发运动。然而,针对如何利用该特性的学术研究仍较少,且缺乏有效的技术方案。
2、目前仅有少数论文提出基于最优控制的方法,通过求解柔性关节速度优化问题,得到电机速度控制输入,但不足在于:1.没有考虑电机本身的特性,特别是高速工况下由于反电动势增加导致转速无法继续提升的问题;2.没有考虑关节转动角度的限制;3.以电机速度控制输入作为优化变量,实际效果很大程度上将收到电机速度闭环控制特性的影响。
3、因此,有必要提供一种控制方法,可以实现如下效果:1.利用柔性关节的能量储放特性提升关节峰值速度;2.兼顾电机性能及关节运动的约束;3.通过直接控制电机转矩以提高响应速度。
技术实现思路
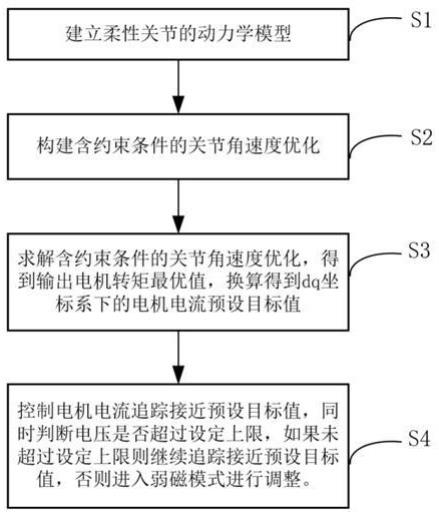
1、为了解决上述问题,本发明提供了一种提升关节峰值速度的控制方法,应用于机器人,至少包括以下步骤:步骤s1:建立柔性关节的动力学模型;步骤s2:构建含约束条件的关节角速度优化方程;步骤s3:求解含约束条件的关节角速度优化方程,得到电机输出转矩最优值,换算得到dq-坐标系下的电机电流预设目标值;步骤s4:控制电机电流追踪接近预设目标值,同时判断电压是否超过设定上限,如果未超过设定上限则继续追踪接近预设目标值,否则进入弱磁模式进行调整。
2、本发明还提供了一种机器人,采用上述的控制方法去提升关节峰值速度。
3、本发明还提供了一种存储介质,存储有计算机程序,当所述计算机程序被运行时,执行上述的提升关节峰值速度的控制方法。
4、与现有技术相比较,本发明带来的有益效果是:本发明提供的基于带约束的速度最优控制方法,通过建立柔性关节的动力学模型,在关节速度优化问题中增加关节角度的约束条件,并将电机转矩作为优化变量,求解出电机转矩最优值实现最大化关节速度,进一步的换算得到电机电流预设目标值。然后,利用矢量控制法追踪转矩输入控制电机电流追踪接近预设目标值,同时结合弱磁模式的控制方法,维持高转速下的转矩输出,从而进一步提升关节的峰值速度。
技术特征:
1.一种提升关节峰值速度的控制方法,应用于机器人,其特征在于,至少包括以下步骤:
2.根据权利要求1所述的控制方法,其特征在于,所述步骤s1中建立柔性关节的动力学模型是指建立包括电机转子、减速机和连杆的动力学模型,所述动力学模型为:
3.根据权利要求1所述的控制方法,其特征在于,所述步骤s2中构建含约束条件的关节角速度优化方程,是指通过调整电机输出转矩,使得在时刻t连杆达到目标位置的同时连杆的角速度达到最大化,并且电机输出转矩不超过其最大承受能力。
4.根据权利要求3所述的控制方法,其特征在于,所述步骤s2中构建含约束条件的关节角速度优化方程中的约束条件为:
5.根据权利要求1所述的控制方法,其特征在于,所述步骤s3中的电机输出转矩最优值,是指为得到最大化连杆在时刻的速度对应的电机输出转矩。
6.根据权利要求5所述的控制方法,其特征在于,所述步骤s3中换算得到dq坐标系下的电机电流预设目标值,换算公式如下所示:,= 0
7.根据权利要求1所述的控制方法,其特征在于,所述步骤s4中判断电压是否超过设定上限,判断公式如下所示:
8.根据权利要求1所述的控制方法,其特征在于,所述步骤s4中控制电机电流追踪接近预设目标值,当判断电压超过设定上限时进入弱磁模式调整电机电流预设目标值,再次控制电机电流追踪接近预设目标值。
9.一种机器人,其特征在于,采用如权利要求1-8任一项所述的控制方法去提升关节峰值速度。
10.一种存储介质,其特征在于,存储有计算机程序,当所述计算机程序被运行时,执行如权利要求1-8任一项所述的提升关节峰值速度的控制方法。
技术总结
本发明公开了一种提升关节峰值速度的控制方法、机器人及电子设备,其中提升关节峰值速度的控制方法包括以下步骤:步骤S1:建立柔性关节的动力学模型;步骤S2:构建含约束条件的关节角速度优化方程;步骤S3:求解含约束条件的关节角速度优化方程,得到电机输出转矩最优值,换算得到dq坐标系下的电机电流预设目标值;步骤S4:控制电机电流追踪接近预设目标值,同时判断电压是否超过设定上限,如果未超过设定上限则继续追踪接近预设目标值,否则进入弱磁模式进行调整。
技术研发人员:吴珉,孙恺,曹宇男
受保护的技术使用者:苏州艾利特机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!