一种机器人手指装置的制作方法
本发明涉及机器人,具体而言,涉及一种机器人手指装置。
背景技术:
1、随着现代工业自动化的发展,机器人在多个行业的飞速发展过程中起到了不可或缺的重要作用,并且随着技术的不断革新,不仅各行各业对机器人有了越来越多的功能需求,而且需要进行生产加工的工件种类也越来越多。
2、现有技术中,在利用机器人对工件进行抓取时,通常会基于工件的形状、尺寸等参数设计不同的机器人手指装置。例如,对于具有内孔的工件进行抓取时,如果希望抓取位置位于工件内孔的孔壁上的话,需要设计出一种机器人手指装置;如果希望抓取位置位于工件的外壁上的话,需要设计出另一种机器人手指装置。因此现有技术中由于机器人手指装置的功能相对较为单一,不能通用于对多种类型的工件的抓取,使得对于机器人手指装置的生产销售方而言,为了满足客户的实际使用需求,通常需要设计制造不同种类的机器人手指装置,否则产品的市场销售会明显受限;对于机器人手指装置的使用方而言,为了满足实际使用需求,需要花费较大时间和精力去选购及装配不同的机器人手指装置,一定程度上提高了其产品的生产制造成本。
技术实现思路
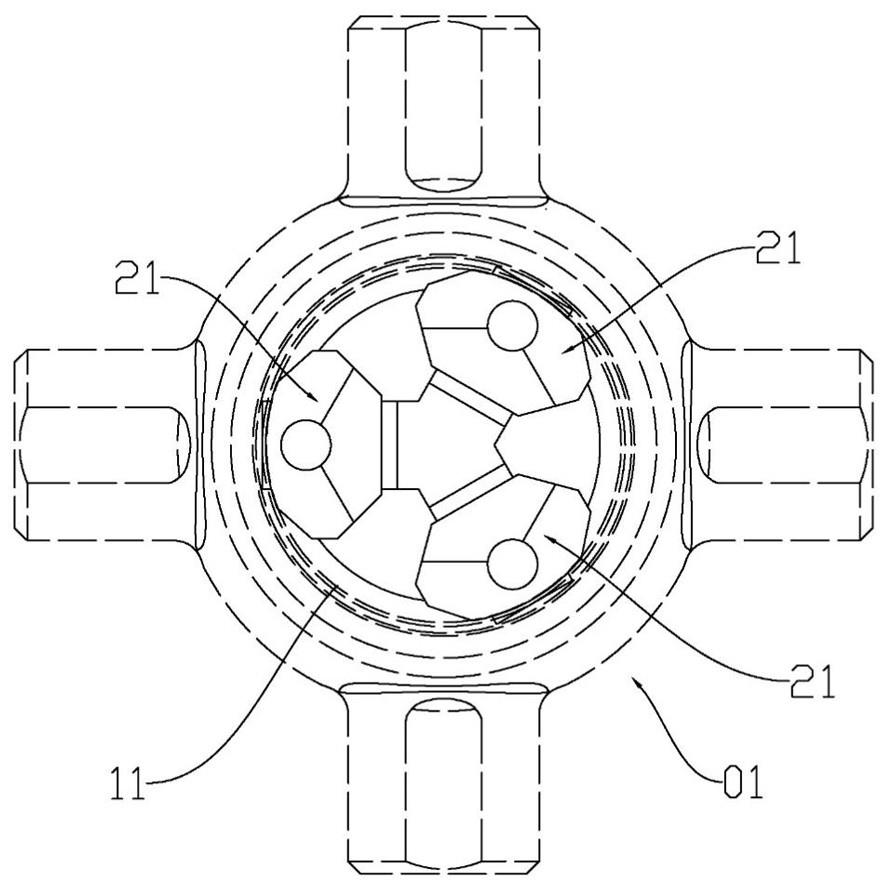
1、为解决现有技术中,单一机器人手指装置所适用的工件种类较少的问题,本发明提供了一种机器人手指装置,所述机器人手指装置包括手指机构、基座和驱动机构;其中,
2、所述手指机构的数量大于或者等于3,均与所述驱动机构连接,且均活动连接在所述基座沿高度方向的一侧;
3、每个所述手指机构的外侧均设有第一抓取面,内侧均设有第二抓取面;全部所述手指机构的所述第一抓取面为形状和尺寸相同的弧面;
4、当全部所述手指机构在所述驱动机构的驱动下相对于所述基座由内向外运动时,全部所述第一抓取面用于分别抵紧有内孔的工件的孔壁;
5、当全部所述手指机构在所述驱动机构的驱动下相对于所述基座由外向内运动时,全部所述第二抓取面用于分别抵紧工件的外壁。
6、在一些实施例中,所述第二抓取面包括第三夹持面;所述机器人手指装置还包括由弹性材料制成的缓冲垫;所述缓冲垫安装在所述手指机构上,所述缓冲垫的部分外壁面形成所述第三夹持面;
7、当全部所述手指机构在所述驱动机构的驱动下相对于所述基座由外向内运动时,所述第三夹持面抵紧工件的外壁。
8、在一些实施例中,所述手指机构上设有沿所述高度方向延伸的安装孔,所述缓冲垫至少部分嵌设于所述安装孔中。
9、在一些实施例中,所述第二抓取面还包括镜像对称设置的第一夹持面和第二夹持面;所述第三夹持面位于所述第一夹持面和所述第二夹持面之间;
10、当全部所述手指机构在所述驱动机构的驱动下相对于所述基座由外向内运动时,所述第一夹持面和所述第二夹持面均抵紧工件的外壁。
11、在一些实施例中,所述第一夹持面和所述第二夹持面均为平面,且所述第一夹持面所在平面和所述第二夹持面所在平面的夹角大于115度且小于125度。
12、在一些实施例中,沿所述高度方向,所述安装孔和所述缓冲垫的横截面均为圆形;所述第一夹持面所在平面和所述第二夹持面所在平面的交线与所述安装孔的轴线不相交。
13、在一些实施例中,所述第一抓取面为圆弧面。
14、在一些实施例中,每个所述手指机构的所述第一抓取面和所述第二抓取面之间还设有至少一个过渡面;所述过渡面上所有的点相较于所述第一抓取面上所有的点均更靠近于所述手指机构的内侧。
15、在一些实施例中,每个所述手指机构的内侧均设有第一限位面;所述第一限位面垂直于所述高度方向,且与所述第二抓取面相交;沿所述高度方向上,全部所述第一限位面位于同一平面上。
16、在一些实施例中,每个所述手指机构的外侧均设有第二限位面;所述第二限位面垂直于所述高度方向,且与所述第一抓取面相交;沿所述高度方向上,全部所述第二限位面位于同一平面上。
17、在一些实施例中,所述基座上设有与所述手指机构数量相同的多个直线滑槽,每个所述手指机构上均连接有与所述直线滑槽形状和尺寸适配的滑块。
18、在一些实施例中,全部所述直线滑槽的中心线相交于同一点。
19、在一些实施例中,所述机器人手指装置还包括与所述手指机构数量相同的多个连接手柄,所述滑块连接在所述连接手柄沿所述高度方向的第一端,所述手指机构可拆卸连接在所述连接手柄沿所述高度方向的第二端。
20、在一些实施例中,所述手指机构的数量为3。
21、本发明实施例提供的机器人手指装置包括手指机构、基座和驱动机构;其中,手指机构的数量大于或者等于3,均与驱动机构连接,且均活动连接在基座沿高度方向的一侧;每个手指机构的外侧均设有第一抓取面,内侧均设有第二抓取面;全部手指机构的第一抓取面为形状和尺寸相同的弧面;当全部手指机构在驱动机构的驱动下相对于基座由内向外运动时,全部第一抓取面用于分别抵紧有内孔的工件的孔壁;当全部手指机构在驱动机构的驱动下相对于基座由外向内运动时,全部第二抓取面用于分别抵紧工件的外壁。由于手指机构具有不同的抓取面,并通过控制驱动机构驱动手指机构相对基座的运动方向,手指机构不同的抓取面与工件内孔或外壁抵紧,较于现有技术而言,本申请实施例提供的机器人手指装置不仅可从工件的孔壁对工件进行抓取,而且还可从工件的外壁对工件进行抓取,从而可适用于对不同尺寸、不同形状的工件进行抓取,扩大了机器人手指装置的适用范围。
技术特征:
1.一种机器人手指装置,其特征在于,所述机器人手指装置包括手指机构、基座和驱动机构;其中,
2.根据权利要求1所述的机器人手指装置,其特征在于,所述第二抓取面包括第三夹持面;所述机器人手指装置还包括由弹性材料制成的缓冲垫;所述缓冲垫安装在所述手指机构上,所述缓冲垫的部分外壁面形成所述第三夹持面;
3.根据权利要求2所述的机器人手指装置,其特征在于,所述手指机构上设有沿所述高度方向延伸的安装孔,所述缓冲垫至少部分嵌设于所述安装孔中。
4.根据权利要求3所述的机器人手指装置,其特征在于,所述第二抓取面还包括镜像对称设置的第一夹持面和第二夹持面;所述第三夹持面位于所述第一夹持面和所述第二夹持面之间;
5.根据权利要求4所述的机器人手指装置,其特征在于,所述第一夹持面和所述第二夹持面均为平面,且所述第一夹持面所在平面和所述第二夹持面所在平面的夹角大于115度且小于125度。
6.根据权利要求4所述的机器人手指装置,其特征在于,沿所述高度方向,所述安装孔和所述缓冲垫的横截面均为圆形;所述第一夹持面所在平面和所述第二夹持面所在平面的交线与所述安装孔的轴线不相交。
7.根据权利要求1所述的机器人手指装置,其特征在于,每个所述手指机构的所述第一抓取面和所述第二抓取面之间还设有至少一个过渡面;所述过渡面上所有的点相较于所述第一抓取面上所有的点均更靠近于所述手指机构的内侧。
8.根据权利要求1所述的机器人手指装置,其特征在于,每个所述手指机构的内侧均设有第一限位面;所述第一限位面垂直于所述高度方向,且与所述第二抓取面相交;沿所述高度方向上,全部所述第一限位面位于同一平面上。
9.根据权利要求1所述的机器人手指装置,其特征在于,每个所述手指机构的外侧均设有第二限位面;所述第二限位面垂直于所述高度方向,且与所述第一抓取面相交;沿所述高度方向上,全部所述第二限位面位于同一平面上。
10.根据权利要求1所述的机器人手指装置,其特征在于,所述基座上设有与所述手指机构数量相同的多个直线滑槽,每个所述手指机构上均连接有与所述直线滑槽形状和尺寸适配的滑块。
技术总结
本发明涉及一种机器人手指装置,包括手指机构、基座和驱动机构;其中,手指机构的数量大于或者等于3,均与驱动机构连接,且均活动连接在基座沿高度方向的一侧;每个手指机构的外侧均设有第一抓取面,内侧均设有第二抓取面;全部手指机构的第一抓取面为形状和尺寸相同的弧面。当全部手指机构在驱动机构的驱动下相对于基座由内向外运动时,全部第一抓取面用于分别抵紧有内孔的工件的孔壁;当全部手指机构在驱动机构的驱动下相对于基座由外向内运动时,全部第二抓取面用于分别抵紧工件的外壁。相较于现有技术而言,本发明公开的机器人手指装置可对更多种类的工件进行抓取。
技术研发人员:袁国庆,牛杰
受保护的技术使用者:万向钱潮股份公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!