集成式关节及机器人的制作方法
本申请涉及机器人领域,尤其涉及一种集成式关节及机器人。
背景技术:
1、在相关技术中,随着机器人技术的不断发展,其越来越多地作为家庭娱乐、教育消费品以及其他消费品大量涌入市场。同时,伴随着大量进入市场的机器人,人们对于机器人的要求也越来越高。其中,对机器人灵活的运动方式对于肢体和关节的体积和重量也提出了更高的要求。
2、而将传动系统与肢体结构和关节结构相融合,提高机器人肢体和关节的集成度,成为减小机器人的体积和重量的有效途径。但是目前的集成式的机器人关节存在尺寸较大,以及反向驱动能力较弱,容易在冲击载荷下容易损坏的问题。
技术实现思路
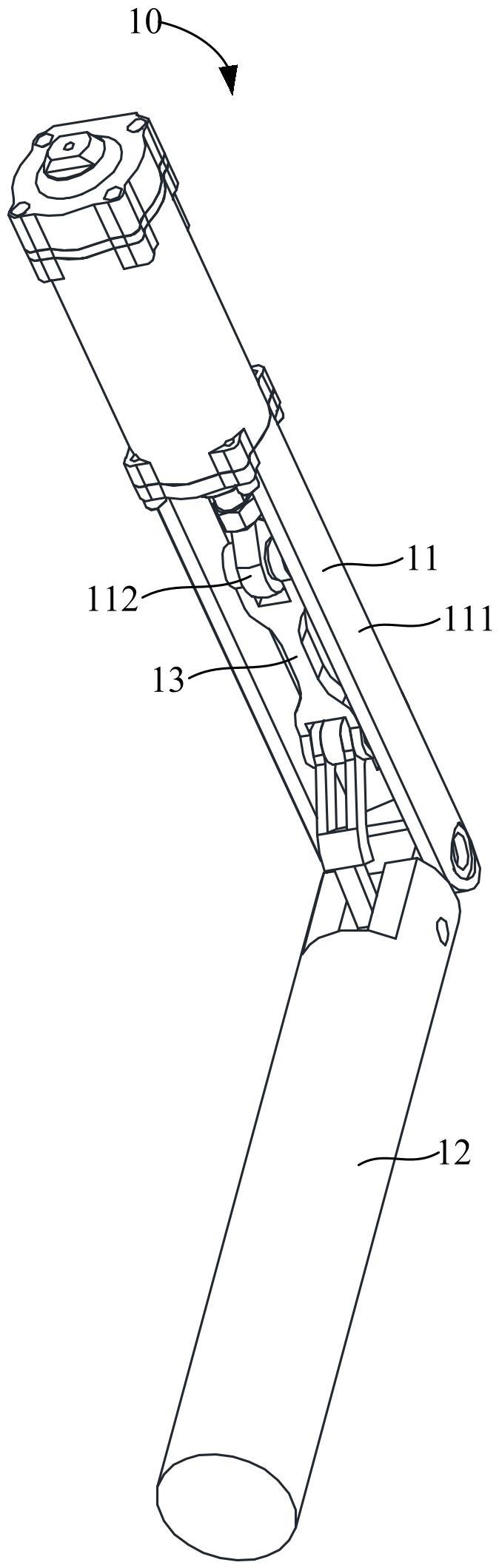
1、根据本申请实施例的第一方面,提供一种集成式关节,包括:驱动关节部与从动关节部;
2、所述驱动关节部的一端与所述从动关节部的一端互相铰接;
3、所述驱动关节部包括驱动关节壳体,以及位于所述驱动关节壳体内的驱动组件;所述驱动组件与所述驱动关节壳体相固定,且所述驱动组件的长度方向与所述驱动关节壳体的长度方向相同;所述驱动组件连接至连杆组,所述连杆组连接至所述驱动关节壳体与所述从动关节部;所述驱动组件用于在运行时通过所述连杆组驱动所述从动关节部。
4、根据上述实施例可知,通过将驱动组件集成于驱动关节部内,并使驱动组件通过连杆组的方式驱动从动关节部,从而,可以在避免将驱动相关的结构集成于关节处,即驱动关节部与从动关节部的铰接部分的同时,通过固定于驱动关节壳体内的驱动组件的结构实现对驱动关节壳体的结构强度的增加,进而,可以通过将驱动组件集成于驱动关节部内,实现增强驱动关节部的结构强度的同时,减少驱动组件所占用的集成式关节的空间,尤其是减少在驱动关节部与从动关节部的铰接处占用的空间。为在集成式关节上设置其他结构,尤其是在驱动关节部与从动关节部的铰接处设置其他结构预留出空间。
5、而由于驱动组件的长度方向与驱动关节壳体的长度方向相同,即在驱动关节壳体的长度方向上的为驱动组件投影面积较小的面。因此,可以更好地将驱动组件集成在驱动关节部内,以进一步减少驱动组件占用的集成式关节的空间。
6、在一些实施例中,所述驱动组件包括定子、转子、滚动柱与螺杆;所述定子固定于所述驱动关节壳体内,且所述定子与所述驱动关节壳体同轴设置;所述转子位于所述定子内,且与所述定子同轴设置;所述转子用于在所述驱动组件运行时,相对所述定子产生转动;所述螺杆位于所述转子内,且与所述转子同轴设置;所述滚动柱以可绕所述螺杆旋转的方式设置于所述螺杆与所述转子之间;所述滚动柱的表面设置有用于与所述螺杆的螺纹相啮合螺纹;所述转子朝向所述螺杆的表面设置有用于与所述滚动柱表面的螺纹相啮合螺纹。
7、在一些实施例中,所述驱动组件还包括至少两个滚柱托盘;所述滚动柱包括齿槽;所述螺杆包括齿轮;
8、所述滚柱托盘与所述螺杆同轴设置,且套设于所述螺杆上;至少两个所述滚柱托盘还对应至少套设于所述滚动柱的两端;所述齿槽与所述齿轮互相啮合。
9、在一些实施例中,所述驱动组件包括至少两个所述滚动柱;且在所述螺杆的长度方向上,所述滚动柱的间距相同。
10、在一些实施例中,所述驱动组件还包括:导向套、活塞杆与套杆;
11、所述导向套与所述螺杆同轴设置,且在所述螺杆的长度方向上,所述导向套的中央设有导向孔;所述活塞杆的一端与所述螺杆固定连接,另一端穿过所述导向孔与所述套杆固定连接;所述套杆与所述连杆组铰接。
12、在一些实施例中,所述驱动组件还包括:限位盘与限位柱;
13、所述限位盘位于所述定子与所述导向套之间,且同时抵接于所述定子与所述导向套;所述限位柱位于所述转子远离所述从动关节部的一侧,且固定于所述驱动关节壳体;
14、所述限位盘朝向所述定子的一侧设有限位槽与限位孔;在所述螺杆的长度方向上,所述限位孔位于所述限位槽的中央;所述活塞杆穿过所述限位孔;所述转子朝向所述限位盘的一端位于所述限位槽内;
15、所述转子与所述限位柱同轴设置;所述转子远离所述限位盘的一端以可旋转的方式与所述限位柱连接。
16、在一些实施例中,所述定子与所述驱动关节壳体的内壁相贴合固定。
17、在一些实施例中,所述转子包括转子部与转子螺纹部;所述转子螺纹部位于所述转子朝向所述螺杆的一侧;
18、所述转子部用于在所述驱动组件运行时,相对所述定子产生转动;所述转子螺纹部远离所述转子的一侧设有用于与所述螺杆的螺纹相啮合的螺纹。
19、在一些实施例中,还包括:角度传感器;所述角度传感器包括测量转子与测量定子,所述测量转子位于所述测量定子内,且与所述测量定子同轴设置;
20、所述测量转子与所述转子固定连接,所述测量定子与所述驱动关节壳体固定连接;所述角度传感器用于根据所述测量转子相对所述测量定子发生的偏转测定所述驱动关节部与所述从动关节部之间的角度。
21、根据本申请的第二方面,提供一种机器人,包括上述任一种集成式关节;且所述机器人还包括躯干体;所述驱动关节部远离所述从动关节部的一端与所述躯干体相连接;所述驱动组件位于所述驱动关节部远离所述从动关节部的一端。
22、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种集成式关节,其特征在于,包括:驱动关节部与从动关节部;
2.根据权利要求1所述的集成式关节,其特征在于,所述驱动组件包括定子、转子、滚动柱与螺杆;所述定子固定于所述驱动关节壳体内,且所述定子与所述驱动关节壳体同轴设置;所述转子位于所述定子内,且与所述定子同轴设置;所述转子用于在所述驱动组件运行时,相对所述定子产生转动;所述螺杆位于所述转子内,且与所述转子同轴设置;所述滚动柱以可绕所述螺杆旋转的方式设置于所述螺杆与所述转子之间;所述滚动柱的表面设置有用于与所述螺杆的螺纹相啮合螺纹;所述转子朝向所述螺杆的表面设置有用于与所述滚动柱表面的螺纹相啮合螺纹。
3.根据权利要求2所述的集成式关节,其特征在于,所述驱动组件还包括至少两个滚柱托盘;所述滚动柱包括齿槽;所述螺杆包括齿轮;
4.根据权利要求3所述的集成式关节,其特征在于,所述驱动组件包括至少两个所述滚动柱;且在所述螺杆的长度方向上,所述滚动柱的间距相同。
5.根据权利要求2所述的集成式关节,其特征在于,所述驱动组件还包括:导向套、活塞杆与套杆;
6.根据权利要求5所述的集成式关节,其特征在于,所述驱动组件还包括:限位盘与限位柱;
7.根据权利要求2所述的集成式关节,其特征在于,所述定子与所述驱动关节壳体的内壁相贴合固定。
8.根据权利要求2所述的集成式关节,其特征在于,所述转子包括转子部与转子螺纹部;所述转子螺纹部位于所述转子朝向所述螺杆的一侧;
9.根据权利要求2所述的集成式关节,其特征在于,还包括:角度传感器;所述角度传感器包括测量转子与测量定子,所述测量转子位于所述测量定子内,且与所述测量定子同轴设置;
10.一种机器人,其特征在于,包括权利要求1至9任一项所述的集成式关节;且所述机器人还包括躯干体;所述驱动关节部远离所述从动关节部的一端与所述躯干体相连接;所述驱动组件位于所述驱动关节部远离所述从动关节部的一端。
技术总结
本申请涉及一种集成式关节及机器人。其中,集成式关节包括:驱动关节部与从动关节部。所述驱动关节部的一端与所述从动关节部的一端互相铰接。所述驱动关节部包括驱动关节壳体,以及位于所述驱动关节壳体内的驱动组件。所述驱动组件与所述驱动关节壳体相固定,且所述驱动组件的长度方向与所述驱动关节壳体的长度方向相同。所述驱动组件连接至连杆组,所述连杆组连接至所述驱动关节壳体与所述从动关节部。所述驱动组件用于在运行时通过所述连杆组驱动所述从动关节部。根据本申请的实施例,可以减少驱动组件占用的集成式关节的空间,为驱动关节部与从动关节部的铰接处设置其他结构预留出空间。
技术研发人员:赵鹏宇,谢安桓,穆玉康,陈思远,孔令雨
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!