工业用机器人的制作方法
本发明涉及一种工业用机器人。
背景技术:
1、专利文献1中记载了一种基板处理装置,包括处理区块,所述处理区块包含表面清洗单元及背面清洗单元作为处理单元,所述表面清洗单元进行基板的表面清洗处理,所述背面清洗单元进行基板的背面清洗处理,所述基板处理装置包括:分度器区块,包含载置有收容多张基板的载体的载体载置部,且包含在与所述载体载置部的所述载体之间搬送基板的分度器机器人;反转路径区块,配置于所述分度器区块与所述处理区块之间,包括载置基板的多层搁板,并且具备使基板的表面及背面反转的反转功能;以及搬送区块,包括在所述各处理单元与所述反转路径区块之间对基板进行搬送的中心机器人。
2、[现有技术文献]
3、[专利文献]
4、[专利文献1]日本专利特开2021-034686号公报
技术实现思路
1、[发明所要解决的问题]
2、在具有对搬送对象物进行搬送的搬送部的工业用机器人中,设置有引导搬送部的移动的导轨。在连结多个导轨的结构的工业用机器人中,有时在将多个导轨分割的状态下进行运输。在所述运输时,要求防止导轨的破损。
3、本发明的目的在于提供一种可防止运输过程中的破损的工业用机器人。
4、[解决问题的技术手段]
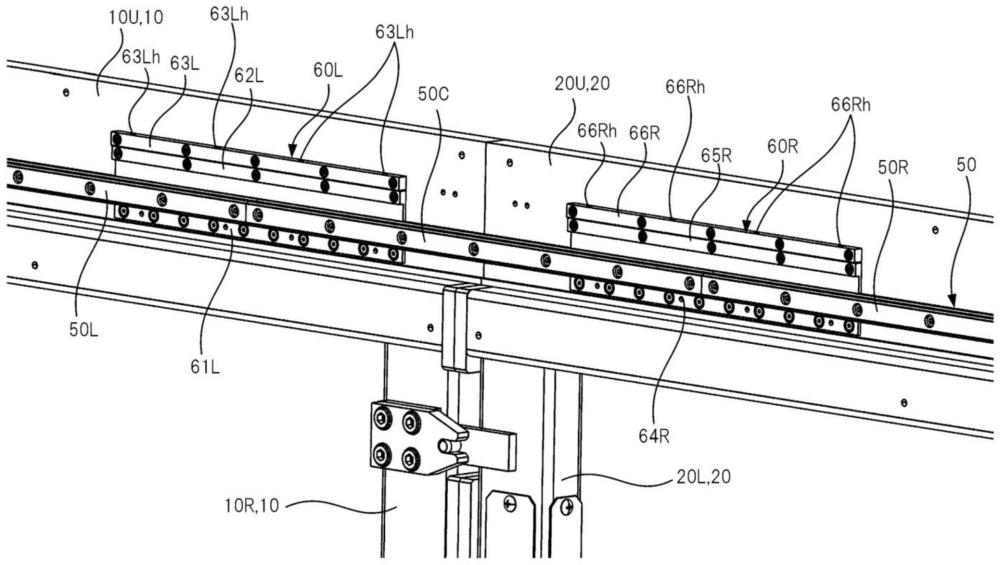
5、本发明的一实施例的工业用机器人包括:导轨,引导对搬送对象物进行搬送的搬送部向第一方向的移动;以及框架,对所述导轨进行支撑,所述导轨包含在所述第一方向上排列的多个轨构件,所述框架包含在所述第一方向上排列的多个框架构件,将相邻的两个所述框架构件中的其中一个框架构件设为第一框架构件,将另一个框架构件设为第二框架构件,所述第一框架构件对作为所述多个轨构件中的任一个的第一轨构件进行支撑,所述第二框架构件对所述多个轨构件中的与所述第一轨构件不同的第二轨构件进行支撑,所述第一轨构件的第二框架构件侧的第一端缘位于比所述第一框架构件与所述第二框架构件的边界更靠第一框架构件侧处,所述第二轨构件的所述第一框架构件侧的第二端缘位于比所述边界更靠所述第二框架构件侧处,所述多个轨构件中所述第一轨构件与所述第二轨构件之间的第三轨构件被所述第一框架构件与所述第二框架构件支撑。
6、[发明的效果]
7、通过本发明,可防止运输过程中的破损。
技术特征:
1.一种工业用机器人,包括:导轨,引导对搬送对象物进行搬送的搬送部向第一方向的移动;以及
2.根据权利要求1所述的工业用机器人,其中,
3.根据权利要求2所述的工业用机器人,其中,
4.根据权利要求3所述的工业用机器人,其中,
5.根据权利要求2所述的工业用机器人,其中,
6.根据权利要求5所述的工业用机器人,其中,
7.根据权利要求6所述的工业用机器人,其中,
技术总结
本发明提供一种可防止运输过程中的破损的工业用机器人。工业用机器人(100)包括:导轨(50),引导搬送部(40)向左右方向的移动;以及框架(FL),对导轨进行支撑,导轨包含在左右方向上排列的左轨构件(50L)、右轨构件(50R)以及中央轨构件(50C),框架包含在左右方向上排列的左框架构件(10)及右框架构件(20),左框架构件对左轨构件进行支撑,右框架构件对右轨构件进行支撑,左轨构件的右端缘(50Le)位于比左框架构件与右框架构件的边界更靠左侧处,右轨构件的左端缘(50Re)位于比所述边界更靠右侧处,中央轨构件被左框架构件与右框架构件支撑。
技术研发人员:细川正己,小林敏之
受保护的技术使用者:尼得科仪器株式会社
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!