一种协作机器人智能控制系统的制作方法
本发明涉及变频器领域,具体为一种协作机器人智能控制系统。
背景技术:
1、焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术,现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等,焊接是工业机器人的最主要应用领域之一。
2、传统的工业机器人焊接产品切换频繁,需不断更新示教编程,且编程难度大、设备调试耗时长,无法短时间投入正常生产,焊接设备对操作者要求较高,需具备专业的焊接能力和编程知识,存在提升空间。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种协作机器人智能控制系统,来解决上述问题。
3、(二)技术方案
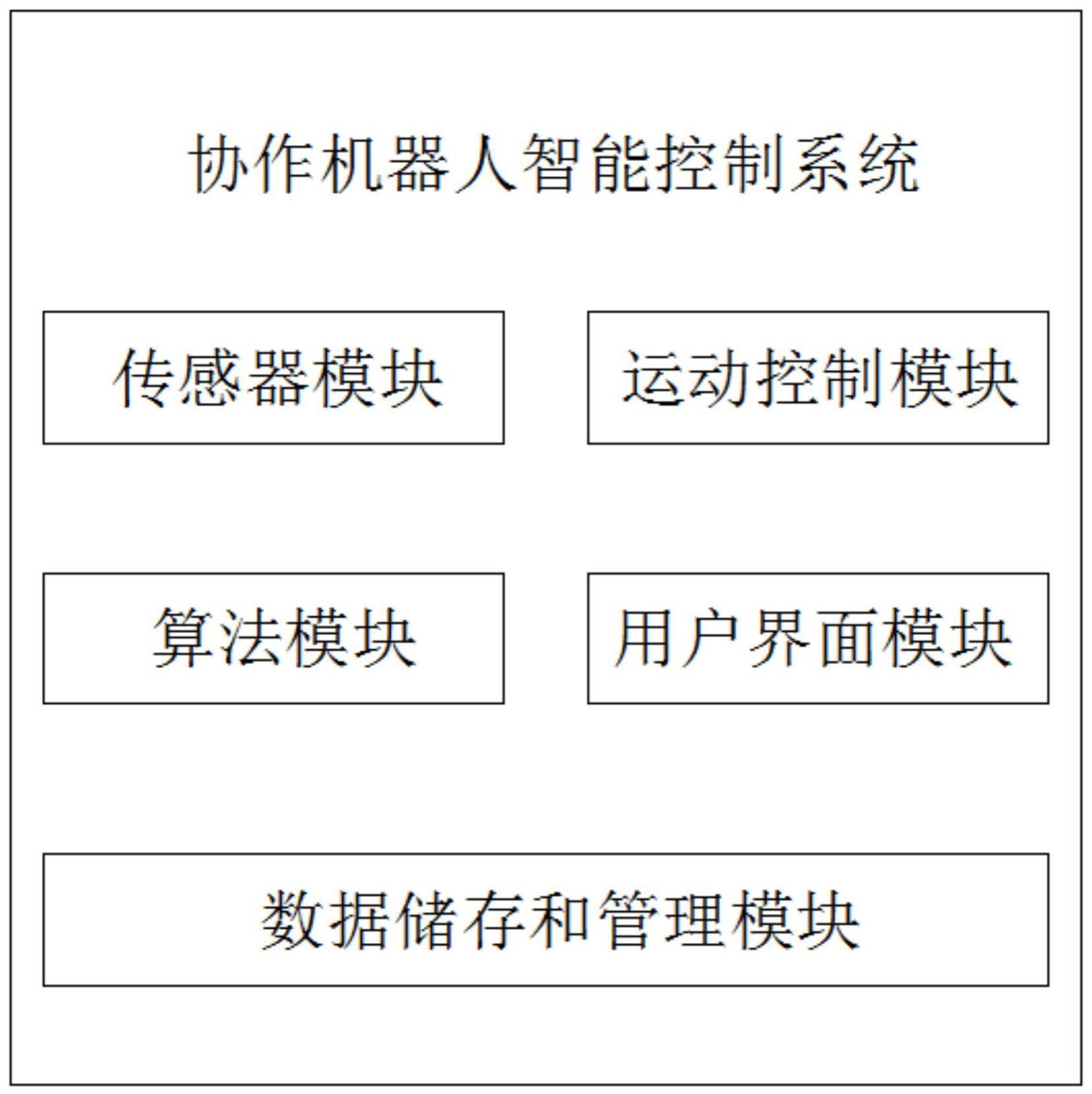
4、为实现上述目的,本发明提供如下技术方案:一种协作机器人智能控制系统,包括:传感器模块,所述传感器模块用于感知环境和焊接工件的状态,收集焊接过程中的实时数据,并将其传递给其他模块进行处理;运动控制模块,所述运动控制模块控制焊接机器人的运动,使其按照预定的路径和速度进行移动;算法模块,所述算法模块用于分析和处理传感器数据,并根据需要生成焊接路径和参数;用户界面模块,所述用户界面模块提供与操作人员交互的界面,使其能够输入焊接任务的参数、监控焊接过程,并对机器人进行调试和故障排除;数据存储和管理模块,所述数据存储和管理模块用于存储和管理焊接任务的参数、传感器数据以及历史记录,并将数据保存到本地或者云端数据库,提供查询和分析功能。
5、优选的,所述传感器模块包括视觉传感器、压力传感器、温度传感器。
6、优选的,所述运动控制模块与机器人的底层控制系统进行通信,通过发送指令来实现运动控制。
7、优选的,所述算法模块基于机器学习、计算机视觉、力学模型技术实现自适应的焊接控制策略。
8、优选的,所述用户界面模块为图形化界面或者命令行界面。
9、优选的,所述用户界面模块引入可视化编程工具,操作人员通过拖拽和连接图形化的程序块来创建焊接任务的控制逻辑
10、根据本发明实施例的另一方面,提供了一种协作机器人智能控制系统的使用方法,包括以下步骤:
11、启动系统,首先需要启动协作焊接机器人智能控制系统,确保所有硬件设备正确连接并处于正常工作状态。
12、配置焊接任务参数,通过用户界面模块,输入焊接任务参数,使用可视化编程工具拖拽和连接图形化的程序块来创建焊接任务的控制逻辑。
13、开始焊接任务,点击开始按钮或命令系统启动焊接任务,系统将焊接任务参数和控制逻辑发送给运动控制模块和算法模块。
14、运动控制与路径规划,运动控制模块接收到焊接任务的参数后,根据预定的路径和速度控制焊接机器人的运动,同时,路径规划算法使机器人在复杂的焊接环境中自动规划最优的运动轨迹。
15、传感器数据采集与处理,焊接过程中,传感器模块实时采集焊接工件的状态数据,所述状态数据经过算法模块的处理,控制焊接过程的实时调整。
16、监控与调试,通过用户界面模块,实时监视焊接任务的进展,并对机器人进行调试和故障排除。
17、完成任务与数据管理,焊接任务完成后,系统将相关的参数、传感器数据和历史记录保存到数据存储和管理模块中,以便后续的查询、分析和回顾。
18、优选的,所述焊接任务参数包括焊接路径、焊接速度、焊接电流。
19、(三)有益效果
20、与现有技术相比,本发明提供了一种协作机器人智能控制系统,具备以下有益效果:
21、该一种协作机器人智能控制系统,可以自动执行各种任务和操作,从而减轻人工劳动的负担,它可以快速、准确地完成一系列复杂的计算和处理,提高工作效率,并且协作机器人采用拖动式编程模式,可极大的降低编程难度,降低操作人员所需技术水平,由于系统具有高度的计算能力和实时响应性,因此它能够迅速回答用户的问题或提供所需的信息,这样可以节省用户的时间,并提供即时的帮助,并且此系统可以用于各种不同的领域和用途,它可以用于客户服务、技术支持、数据分析、语言翻译等方面,这种多功能性使得系统在各种情境下都非常有用。
技术特征:
1.一种协作机器人智能控制系统,其特征在于,包括:传感器模块,所述传感器模块用于感知环境和焊接工件的状态,收集焊接过程中的实时数据,并将其传递给其他模块进行处理;运动控制模块,所述运动控制模块控制焊接机器人的运动,使其按照预定的路径和速度进行移动;算法模块,所述算法模块用于分析和处理传感器数据,并根据需要生成焊接路径和参数;用户界面模块,所述用户界面模块提供与操作人员交互的界面,使其能够输入焊接任务的参数、监控焊接过程,并对机器人进行调试和故障排除;数据存储和管理模块,所述数据存储和管理模块用于存储和管理焊接任务的参数、传感器数据以及历史记录,并将数据保存到本地或者云端数据库,提供查询和分析功能。
2.根据权利要求1所述的协作机器人智能控制系统,其特征在于:所述传感器模块包括视觉传感器、压力传感器、温度传感器。
3.根据权利要求1所述的协作机器人智能控制系统,其特征在于:所述运动控制模块与机器人的底层控制系统进行通信,通过发送指令来实现运动控制。
4.根据权利要求1所述的协作机器人智能控制系统,其特征在于:所述算法模块基于机器学习、计算机视觉、力学模型技术实现自适应的焊接控制策略。
5.根据权利要求1所述的协作机器人智能控制系统,其特征在于:所述用户界面模块为图形化界面或者命令行界面。
6.根据权利要求1所述的协作机器人智能控制系统,其特征在于:所述用户界面模块引入可视化编程工具,操作人员通过拖拽和连接图形化的程序块来创建焊接任务的控制逻辑。
7.一种协作机器人智能控制系统的使用方法,其特征在于,包括以下步骤:
8.根据权利要求7所述的协作机器人智能控制系统的使用方法,其特征在于:所述焊接任务参数包括焊接路径、焊接速度、焊接电流。
技术总结
本发明涉及变频器领域,且公开了一种协作机器人智能控制系统,包括:传感器模块,所述传感器模块用于感知环境和焊接工件的状态,收集焊接过程中的实时数据,并将其传递给其他模块进行处理;运动控制模块,所述运动控制模块控制焊接机器人的运动,使其按照预定的路径和速度进行移动;算法模块,所述算法模块用于分析和处理传感器数据,并根据需要生成焊接路径和参数。本发明所述的一种协作机器人智能控制系统,可以自动执行各种任务和操作,从而减轻人工劳动的负担,它可以快速、准确地完成一系列复杂的计算和处理,提高工作效率,并且协作机器人采用拖动式编程模式,可极大的降低编程难度,降低操作人员所需技术水平。
技术研发人员:刘吉庆,王卫东
受保护的技术使用者:新蔚来智能科技(山东)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!