用于车门自动拆装的轨道车辆车门自适应定位方法及系统与流程
本发明属于轨道车辆检修,尤其涉及一种用于车门拆装的轨道车辆车门定位方法及系统。
背景技术:
1、为了保障城市轨道交通车辆运行的可靠性和安全性,在运行一段时间后,车辆必须返回车辆段或停车场进行维修或保养。在实际车辆的维修保养中,车门维修的工作量占到了很大的比例。
2、针对实际的车门拆卸、安装工作,通常的做法是人工对车门紧固件手工松动之后,再人工进行拆卸和安装,以此对地铁车门相关部件进行检修、维护等工作。在操作期间,工人身体负荷较大,不仅效率低下,且极易产生疲劳,诱发风险。
3、轨道车辆在进行大修时,需要对其进行解编。所谓解编是指让车厢与车厢之间脱离。车厢在解编后,相邻车厢间的间距变得较为随机,使得在进行车门拆装时定位车门的难度增大。
4、为了解决上述问题,申请人申请的发明专利cn202310422578.5公开了一种轨道车辆车门自动拆装装置及方法,包括:驱动小车行驶至待拆装车门的门洞处;对门洞位置进行定位;消除定位获得的门洞位置与实际门洞位置之间的误差;根据消除误差后的门洞位置进行车门的拆装。
5、实质上,上述专利中进行门洞定位的方法是一种示教方法,需要人工将手持的移动终端移动到车门旁才能成功定位。在实际使用的时候无法做到完全自动化。
技术实现思路
1、有鉴于此,本发明提供一种用于车门自动拆装的轨道车辆车门自适应定位方法及系统,能够快速定位待检修轨道列车上车门的位置,并且无需人工示教。
2、为解决以上技术问题,本发明的技术方案为采用一种用于车门自动拆装的轨道车辆车门自适应定位方法,包括:
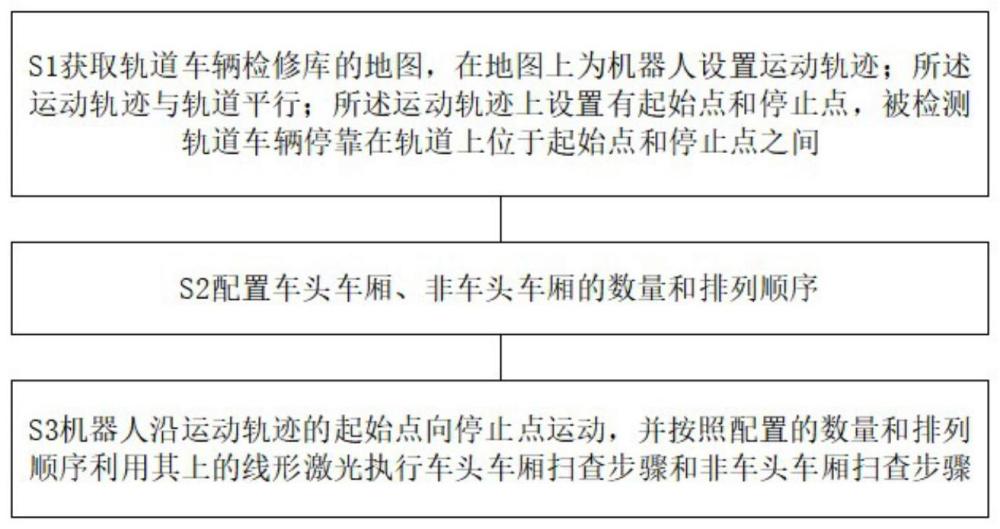
3、获取轨道车辆检修库的地图,在地图上为机器人设置运动轨迹;所述运动轨迹与轨道平行;所述运动轨迹上设置有起始点和停止点,被检测轨道车辆停靠在轨道上位于起始点和停止点之间;
4、配置车头车厢、非车头车厢的数量和排列顺序;
5、机器人沿运动轨迹的起始点向停止点运动,并按照配置的数量和排列顺序利用其上的线形激光执行车头车厢扫查步骤和非车头车厢扫查步骤;
6、所述车头车厢扫查步骤包括:判断扫查获得的激光信号是否有突变,若有则将激光发生突变的位置记作车头车厢的车头位置;将机器人从车头位置行进a米后的位置记作车门位置,所述a米为车头与第一对车门的中心距;将机器人从第一对车门位置开始行进(n-1)*b米中每隔b米记录一个车门位置,所述b米为相邻车门中心距的间距,n为车头车厢车门数量;当激光信号发生第二次突变时,车头车厢车门位置定位结束;
7、所述非车头车厢扫查步骤包括,判断扫查获得的激光信号是否有突变,若有则将激光发生突变的位置记作非车头车厢的连接点位置;将机器人从连接点位置行进c米后的位置记作车门位置,所述c米为连接点与第一对车门的中心距;将机器人从第一对车门位置开始行进(m-1)*b米中每隔b米记录一个车门位置,所述b米为相邻车门中心距的间距,m为非车头车厢车门数量;当激光信号发生第二次突变时,非车头车厢车门位置定位结束。
8、作为一种改进,所述轨道车辆检修库地图的y轴或者x轴与轨道平行。
9、作为一种改进,所述突变为激光信号在扫查方向行进0.01m范围内,线形激光检测到车体侧面有超过0.2m的深度变化。
10、作为一种进一步的改进,所述机器人上的线形激光的敏感范围x满足s<x<s+n,所述机器人运动轨迹与待检测轨道车辆相邻车侧的距离为s,所述轨道的宽度为n。
11、作为另一种更进一步的改进,在进行车门装配时,对于车头车厢忽略第二次至第n+1次激光信号突变,对于非车头车厢忽略第二次至第m次激光信号突变。
12、作为一种改进,判断激光信号突变位置是否与车门位置重合,若重合则忽略该次激光信号突变。
13、本发明还提供一种用于车门自动拆装的轨道车辆车门自适应定位系统,包括:
14、机器人,所述机器人上设置有激光扫查装置,用于对待检测轨道车辆侧面进行扫查;
15、上位机,用于判断待检测列车上车门的位置。
16、作为一种改进,所述上位机包括:
17、地图获取模块,用于获取轨道车辆检修库的地图,在地图上为机器人设置运动轨迹;所述运动轨迹与轨道平行;所述运动轨迹上设置有起始点和停止点;
18、配置模块,用于配置车头车厢、非车头车厢的数量和排列顺序;
19、车头车厢车门位置定位模块,用于对车头车厢上的车门位置进行定位;
20、非车头车厢车门位置定位模块,用于对非车头车厢上的车门位置进行定位。
21、作为一种进一步的改进,所述车头车厢车门位置定位模块包括:
22、激光信号突变判断模块,用于判断扫查获得的激光信号是否发生突变,并根据激光信号突变判断车头车厢的车头位置和车厢结束位置;
23、车门位置确定模块,用于将机器人从车头位置行进a米后的位置记作车门位置,所述a米为车头与第一对车门的中心距;将机器人从第一对车门位置开始行进(n-1)*b米中每隔b米记录一个车门位置,所述b米为相邻车门中心距的间距,n为车头车厢车门数量。
24、作为一种进一步的改进,所述非车头车厢车门位置定位模块包括:
25、激光信号突变判断模块,用于判断扫查获得的激光信号是否发生突变,并根据激光信号突变判断车头车厢的车头位置和车厢结束位置;
26、车门位置确定模块,将机器人从连接点位置行进c米后的位置记作车门位置,所述c米为连接点与第一对车门的中心距;将机器人从第一对车门位置开始行进(m-1)*b米中每隔b米记录一个车门位置,所述b米为相邻车门中心距的间距,m为非车头车厢车门数量。
27、本发明的有益之处在于:
28、本发明在通过激光扫查的方式判断车厢头尾位置的基础上,利用车门的数量和位置固定的原则,计算出车门的所在位置。摒弃了现有技术中通过示教寻位,或者通过3d点云实例分割的方式获得车门位置的繁琐方法。使得机器人可快速定位到车门位置。由于在实际应用中,机器人作为承载机械臂进行车门拆装的设备,并不需要定位非常准确,只需要定位到机械臂的工作范围内即可。因此本发明通过一种较为经济的方式满足了车位位置的定位需要。并且本发明提供的定位方法以车厢为单位进行车门的定位,因此对于解编的车厢来说,尽管车厢间的间距是随机的,其仍然可以自适应地对每节车厢上的车门进行准确的定位。
技术特征:
1.一种用于车门自动拆装的轨道车辆车门自适应定位方法,其特征在于包括:
2.根据权利要求1所述的一种用于车门自动拆装的轨道车辆车门自适应定位方法,其特征在于:所述轨道车辆检修库地图的y轴或者x轴与轨道平行。
3.根据权利要求1所述的一种用于车门自动拆装的轨道车辆车门自适应定位方法,其特征在于:所述突变为激光信号在扫查方向行进0.01m范围内,线形激光检测到车体侧面有超过0.2m的深度变化。
4.根据权利要求1所述的一种用于车门自动拆装的轨道车辆车门自适应定位方法,其特征在于:所述机器人上的线形激光的垂直于轨道的敏感范围x满足s<x<s+n,所述机器人运动轨迹与待检测轨道车辆相邻车侧的距离为s,所述轨道的宽度为n。
5.根据权利要求1所述的一种用于车门自动拆装的轨道车辆车门自适应定位方法,其特征在于:在进行车门装配时,对于车头车厢忽略第二次至第n+1次激光信号突变,对于非车头车厢忽略第二次至第m次激光信号突变。
6.根据权利要求1所述的一种用于车门自动拆装的轨道车辆车门自适应定位方法,其特征在于:判断激光信号突变位置是否与车门位置重合,若重合则忽略该次激光信号突变事件。
7.一种用于车门自动拆装的轨道车辆车门自适应定位系统,其特征在于包括:
8.根据权利要求7所述的一种用于车门自动拆装的轨道车辆车门自适应定位系统,其特征在于所述上位机包括:
9.根据权利要求8所述的一种用于车门自动拆装的轨道车辆车门自适应定位系统,其特征在于所述车头车厢车门位置定位模块包括:
10.根据权利要求8所述的一种用于车门自动拆装的轨道车辆车门自适应定位系统,其特征在于所述非车头车厢车门位置定位模块包括:
技术总结
本发明公开了一种用于车门自动拆装的轨道车辆车门自适应定位方法及系统,属于轨道车辆检修技术领域,该方法包括获取轨道车辆检修库的地图,在地图上为机器人设置运动轨迹;配置车头车厢、非车头车厢的数量和排列顺序;机器人沿运动轨迹的起始点向停止点运动,并按照配置的数量和排列顺序利用其上的线形激光执行车头车厢扫查步骤和非车头车厢扫查步骤;本发明能够快速定位待检修轨道列车上车门的位置,并且无需人工示教。
技术研发人员:杨峰,刘锦程
受保护的技术使用者:北京市轨道交通运营管理有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!