一种多机器人协同作业的任务分配方法与流程
本发明属于多机器人协同作业,具体涉及一种多机器人协同作业的任务分配方法。
背景技术:
1、随着工业机器人技术的不断发展和实际应用的需要,多机器人系统越来越多的应用到生产当中。多机器人系统具有智能高效、功能性强和鲁棒性高等特点,在船舶分段制造、管法兰组对焊接等业务领域有很好的应用前景,为保证多机器人系统稳定高效的工作,如何进行多机器人任务分配使机器人之间合作达到最优是多机器人协作的关键。多机器人任务分配要考虑多机器人协同作业、防止碰撞、路径规划、时序约束等要素问题,并根据不同机器人的能力将一定的任务分配给机器人,实现多机器人协同作业。传统的多机器人分配方法在均衡任务和多目标优化问题求解方面存在一定局限性,无法满足既要合理分配任务,又要机器人路径最短及多机器人之间协调避碰等约束条件。针对目前多机器人协同作业任务分配不均衡、存在空间时间冲突、效率低等多目标优化问题,提出一种多机器人协同作业的任务分配方法,实现各机器人的最佳任务点选择和冲突消解,提高多机器人系统工作效率,对汽车、船舶等工业领域多机器人协同制造的高效任务分配具有重要意义。
技术实现思路
1、为解决上述技术问题,本发明提供一种多机器人协同作业的任务分配方法,实现多机器人系统工作效率提高的同时避免碰撞发生。
2、本发明的目的是通过以下技术方案实现的,一种多机器人协同作业的任务分配方法,包括以下步骤:
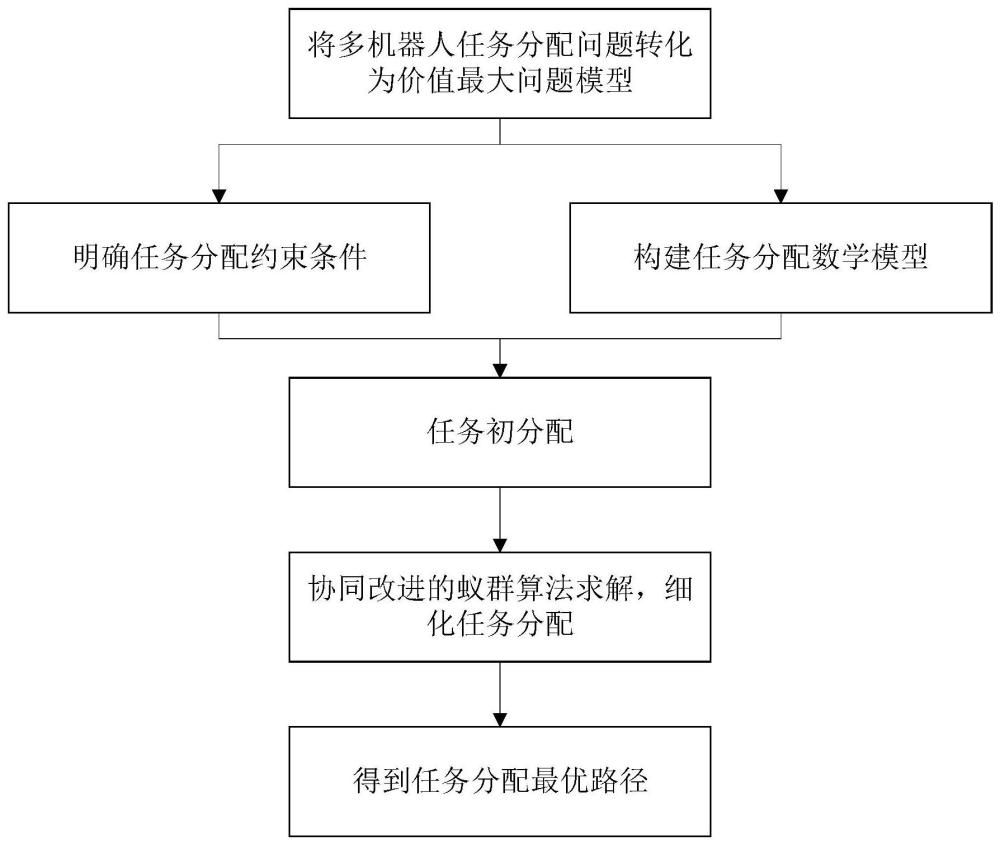
3、步骤1:对多机器人任务分配进行问题描述,将多机器人任务分配转化为多背包价值最大的问题,使机器人系统完成任务的价值最高,且满足任务分配的约束条件;建立以各机器人完成任务价值最高为目标的任务分配数学模型,并抽象为不平衡任务指派模型;
4、步骤2:将任务初分配复杂问题划分为几个子种群;
5、步骤3:采用协同改进蚁群算法对多机器人任务分配数学模型进行求解,对多机器人任务进行细化最终得到多机器人任务分配的全局最优解。
6、优选的,步骤1中,各机器人完成任务价值最高为目标的任务分配数学模型如式(1)所示:
7、
8、其中m为机器人个数,n为机器人任务交叉点,vpq为任务p与机器人q之间的价值向量,保证任务点分配给机器人时价值最大,vpq为0-1变量,保证任务点只能分配给一个机器人。tpq为任务p与机器人q之间的价值,式(1)中数学模型的解即为任务点与机器人之间的价值集合。
9、抽象后的不平衡任务指派模型可表示为式(2):
10、minda=dtvpq (2)
11、其中,d为效益矩阵,表示任务点到各机器人起点的距离;da为任务点到各机器人起点的总价值。
12、优选的,在步骤1中,各机器人任务分配的约束条件包括路径最短,总时间最少、防碰撞和任务分配均衡。
13、优选的,任务分配约束条件的分配原则如下:
14、每个任务点不能重复分配给多个机器人;
15、每个机器人被分配的任务数不能超过总任务数;
16、每个机器人任务数差异在一定偏差内。
17、优选的,步骤2中,任务初分配遵循以下原则:在每个子种群内各机器人在自身路径最短的基础上,保证各机器人遍历所有任务点只经过一次,如式(3)所示:
18、
19、式中,dij为每两个任务点之间的距离;vij为决策变量,其取值在最优时为1,否则为0;ds为单机器人所走路径的距离之和。
20、优选的,步骤3中具体包括以下步骤:
21、步骤3.1:对每个子种群进行参数初始化;
22、步骤3.2:对参数初始化后的子种群建立其目标函数;
23、步骤3.3:根据信息素选取各子种群的自身变量;
24、步骤3.4:对选取的自身变量进行适应度评估;
25、步骤3.5:根据适应度评估结果独立更新各子种群信息素,并对更新后的子种群进行评估,如评估结果满足最优解条件,则进行任务分配并计算各机器人间路径总距离,在所有结果中取最小值;如评估结果不满足最优解条件,则返回步骤3.3。
26、优选的,在步骤3.1中采用启发函数μij进行参数初始化,当子种群数为m,任务数为n,其启发函数μij如式(4)所示:
27、
28、优选的,在步骤3.2中:以各子种群路径距离以及其他子种群合作路径的总距离为目标函数,建立加权多目标函数,如式(5)所示:
29、
30、式中,ω1和ω2为加权系数,l表示相邻两个机器人对应任务点之间的距离。
31、优选的,在步骤3.3中,根据信息素选取各子种群的自身变量的方法为:将各子种群任务编号,设置所有蚁群路径起点相同及初始信息素浓度相同,计算t时刻下m1从任务点i移动到任务点j的概率p:
32、
33、其中,γ表示信息素因子,ε表示启发函数因子,s表示从待访问集合中选取的任务点,τij表示任务点i到任务点j的信息素浓度。
34、优选的,步骤3.5具体包括以下步骤:
35、步骤3.5.1:根据适应度评估结果独立更新各子种群信息素,各子种群独立更新,互不影响,如式(7)所示:
36、
37、其中:
38、
39、
40、式中,q为信息素增加系数,l为个体经过路径的总长度,δτij为在任务点i和任务点j间增加的信息素浓度;
41、步骤3.5.2:对更新后的子种群进行评估,如评估结果满足最优解条件,则进行任务分配并计算各机器人间路径总距离,在所有结果中取最小值,如式(10)所示:
42、dt=min{d1,d2,…,dm} (10)
43、式中,dt为任务分配结果中机器人间的总距离;d1,d2,…,dm分别表示各子种群作为发起者而其他种群作为合作者的最短距离。
44、与现有技术相比,本发明具备以下优点:
45、本发明提供的一种多机器人协同作业的任务分配方法,通过将总分配任务划分为多个子种群进行初分配,以各机器人路径最短、总时间最少和防止碰撞多的目标适应度函数为指标进行多子种群合作交流,然后采用协同改进的蚁群算法对多机器人任务分配进行优化,在提高多机器人系统工作效率的同时避免碰撞发生,实现各机器人的最佳任务点选择和冲突消解,提高多机器人系统工作效率。
技术特征:
1.一种多机器人协同作业的任务分配方法,其特征在于:所述方法包括以下步骤:
2.如权利要求1所述的一种多机器人协同作业的任务分配方法,其特征在于:在所述步骤1中,各机器人任务分配的约束条件包括路径最短,总时间最少、防碰撞和任务分配均衡。
3.如权利要求2所述的一种多机器人协同作业的任务分配方法,其特征在于:所述步骤1中,各机器人完成任务价值最高为目标的任务分配数学模型如式(1)所示:
4.如权利要求3所述的一种多机器人协同作业的任务分配方法,其特征在于:任务分配约束条件的分配原则如下:
5.如权利要求4所述的一种多机器人协同作业的任务分配方法,其特征在于:所述步骤2中,任务初分配遵循以下原则:在每个子种群内各机器人在自身路径最短的基础上,保证各机器人遍历所有任务点只经过一次,如式(3)所示:
6.如权利要求5所述的一种多机器人协同作业的任务分配方法,其特征在于:所述步骤3中具体包括以下步骤:
7.如权利要求6所述的一种多机器人协同作业的任务分配方法,其特征在于:在所述步骤3.1中,采用启发函数μij进行参数初始化,当子种群数为m,任务数为n,其启发函数μij如式(4)所示:
8.如权利要求7所述的一种多机器人协同作业的任务分配方法,其特征在于:在所述步骤3.2中:以各子种群路径距离以及其他子种群合作路径的总距离为目标函数,建立加权多目标函数,如式(5)所示:
9.如权利要求8所述的一种多机器人协同作业的任务分配方法,其特征在于:在所述步骤3.3中,根据信息素选取各子种群的自身变量的方法为:将各子种群任务编号,设置所有蚁群路径起点相同及初始信息素浓度相同,计算t时刻下m1从任务点i移动到任务点j的概率p:
10.如权利要求9所述的一种多机器人协同作业的任务分配方法,其特征在于:所述步骤3.5具体包括以下步骤:
技术总结
本发明公开了一种多机器人协同作业的任务分配方法,首先对多机器人任务分配进行问题描述,使机器人系统完成任务的价值最高,并建立以各机器人完成任务价值最高为目标的任务分配数学模型;然后将任务初分配问题划分为几个子种群;最后采用协同改进蚁群算法对任务分配数学模型进行求解,对任务进行细化最终得到多机器人任务分配的最优解。本发明通过将总分配任务划分为多个子种群进行初分配,以各机器人路径最短、总时间最少和防止碰撞多的目标适应度函数为指标进行多子种群合作交流,采用蚁群算法对多机器人任务分配进行优化,在提高多机器人系统工作效率的同时避免碰撞发生,实现各机器人的最佳任务点选择和冲突消解,提高多机器人系统工作效率。
技术研发人员:牛延丹,王旭,吴治翰,姜军,周文鑫,沈文轩,韩炯,张涛
受保护的技术使用者:上海船舶工艺研究所(中国船舶集团有限公司第十一研究所)
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!