一种用于空间受限非结构化环境的气动软体机器人
本申请涉及软体机器人,尤其是一种用于空间受限非结构化环境的气动软体机器人。
背景技术:
1、软体机器人设计通常需要仿生学的参与。由于其独特的移动机制,尺蠖是软体机器人设计中常用的仿生对象。尺蠖的身体由若干体节构成,可在肌肉作用下伸展为蜷缩为“ω”形,从而实现伸缩,身体前后各有一组足,用于锚定自身。尺蠖前进时,先蜷缩身体,再将后足锚定,随后伸展身体,锚定前足,最后解除后足锚定,再次蜷缩身体,从而实现整体的前移。
2、现有的多种管道软体机器人都是对这一结构的复现。每个此类机器人的最小单体都由一个锚定机构,一个伸缩机构和另一个锚定机构依次连接而成,并按上述尺蠖运动的过程驱动锚定机构与伸缩机构,从而实现机器人在管道中的运动。
3、与其他方案相比,基于尺蠖仿生的管道软体机器人对管道有更好的适应能力,能够初步解决管道作业中存在的问题。然而,受其设计目的和机械结构的限制,这类管道软体机器人在空间受限的非结构化环境中的应用存在一定的困难,其无法适用更多的变化的环境。因此,相关技术中仍存在需要解决的技术问题。
技术实现思路
1、本申请的目的在于至少一定程度上解决现有技术中存在的技术问题之一。
2、为此,本申请实施例的一个目的在于提供一种用于空间受限非结构化环境的气动软体机器人;该机器人可以适应变化的环境具有更好的实用性。
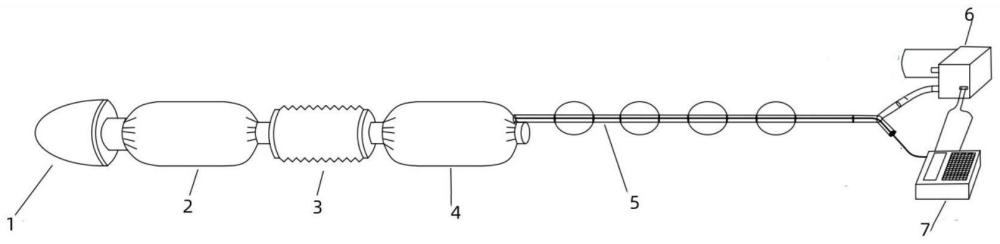
3、为了达到上述技术目的,本申请实施例所采取的技术方案包括:一种用于空间受限非结构化环境的气动软体机器人,包括依次设置的载荷平台、前锚定单元、伸缩单元、后锚定单元、气电一体管线、气源及控制器;所述前锚定单元包括前锚定单元电磁阀;所述后锚定单元包括后锚定单元电磁阀;所述前锚定单元通过所述前锚定单元电磁阀与所述伸缩单元实现气路的连接;所述前锚定单元通过所述后锚定单元电磁阀以及所述气电一体管线与所述气源实现气路的连接;所述气源以及所述控制器用于通过所述气电一体管线共同调整所述前锚定单元、所述伸缩单元以及所述后锚定单元的体积和形状。
4、另外,根据本发明中上述实施例的一种用于空间受限非结构化环境的气动软体机器人,还可以有以下附加的技术特征:
5、进一步地,本申请实施例中,所述气电一体管线包括纺锤形光面泡沫块;所述纺锤形光面泡沫块在所述气电一体管线上间隔设置。
6、进一步地,本申请实施例中,所述前锚定单元以及所述后锚定单元均还包括保护层、气球以及摩擦垫片;所述保护层包裹所述气球,所述保护层用于保护所述气球被环境损坏;所述摩擦垫片设置于保护层上;所述气球用于接收气体膨胀自身,以膨胀所述前锚定单元以及所述后锚定单元;所述摩擦垫片用于增加所述前锚定单元以及所述后锚定单元的表面摩擦力。
7、进一步地,本申请实施例中,所述荷载平台包括热成像模块,气体传感器,温湿度传感器,摄像头和麦克风模块。
8、进一步地,本申请实施例中,所述前锚定单元以及所述后锚定单元未膨胀时在轴向上的直径小于载荷平台在轴向上的最大直径。
9、进一步地,本申请实施例中,所述伸缩单元包括波纹管、第一气路接头以及第二气路接头;所述第一气路接头用于与所述后锚定单元电磁阀连接;所述第二气路接头用于与所述前锚定单元电磁阀连接。
10、进一步地,本申请实施例中,所述后锚定单元电磁阀以及所述前锚定单元电磁阀均包括常闭端、常开端以及进气端。
11、进一步地,本申请实施例中,所述控制器包括微处理器、微型屏幕、配置面板和固态继电器。
12、进一步地,本申请实施例中,所述保护层的材料为超高分子量聚乙烯纤维。
13、另一方面,本申请实施例还提供一种机器人控制方法,用于控制上述前面任一项所述的用于空间受限非结构化环境的气动软体机器人,方法包括:
14、控制器打开后锚定单元电磁阀通过气源控制后锚定单元膨胀并获取机器人的第一检测数据;根据所述第一检测数据,控制器确定障碍检测单元的第一检测结果;所述第一检测结果用于供控制器判断机器人是否第一次锚定成功;所述第一检测数据包括所述后锚定单元膨胀期间的气压与时间关系;当机器人第一次锚定成功,控制器关闭所述后锚定单元电磁阀以及关闭所述前锚定单元电磁阀,并控制气源为所述伸缩单元充气以及控制伸缩单元轴向延展预设距离,使所述软体机器人第一次重心前移;控制器打开所述前锚定单元电磁阀,并控制气源为所述前锚定单元充气使前锚定单元膨胀并获取机器人的第二检测数据;根据所述第二检测数据,控制器得到障碍检测单元的第二检测结果;所述第二检测结果用于供控制器检测机器人是否第二次锚定成功;所述第二检测数据包含所述前锚定单元膨胀期间的气压与时间关系;当机器人第二次锚定成功,控制器关闭所述前锚定单元电磁阀,并控制所述气源输出负压,使所述前锚定单元恢复膨胀前的状态。
15、本申请的优点和有益效果将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实践了解到:
16、本申请可以通过载荷平台、前锚定单元、伸缩单元、后锚定单元、气电一体管线、气源及控制器通过两次锚定实现软体机器人的整体移动,而且本申请的前锚定单元、伸缩单元、后锚定单元只进行轴向运动,而不需蜷缩为“ω”形,可以适应更多的应用场景,可以提高软体机器人的环境适应能力,提高软体机器人的实用性。
技术特征:
1.一种用于空间受限非结构化环境的气动软体机器人,其特征在于,包括:
2.根据权利要求1所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述气电一体管线包括纺锤形光面泡沫块;所述纺锤形光面泡沫块在所述气电一体管线上间隔设置。
3.根据权利要求1所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述前锚定单元以及所述后锚定单元均还包括保护层、气球以及摩擦垫片;所述保护层包裹所述气球,所述保护层用于保护所述气球被环境损坏;所述摩擦垫片设置于保护层上;所述气球用于接收气体膨胀自身,以膨胀所述前锚定单元以及所述后锚定单元;所述摩擦垫片用于增加所述前锚定单元以及所述后锚定单元的表面摩擦力。
4.根据权利要求1所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述荷载平台包括热成像模块,气体传感器,温湿度传感器,摄像头和麦克风模块。
5.根据权利要求1所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述前锚定单元以及所述后锚定单元未膨胀时在轴向上的直径小于载荷平台在轴向上的最大直径。
6.根据权利要求5所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述伸缩单元包括波纹管、第一气路接头以及第二气路接头;所述第一气路接头用于与所述后锚定单元电磁阀连接;所述第二气路接头用于与所述前锚定单元电磁阀连接。
7.根据权利要求1所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述后锚定单元电磁阀以及所述前锚定单元电磁阀均包括常闭端、常开端以及进气端。
8.根据权利要求1所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述控制器包括微处理器、微型屏幕、配置面板和固态继电器。
9.根据权利要求3所述一种用于空间受限非结构化环境的气动软体机器人,其特征在于,所述保护层的材料为超高分子量聚乙烯纤维。
10.一种用于空间受限非结构化环境的气动软体机器人控制方法,其特征在于,用于控制上述权利要求1-9任一项所述的用于空间受限非结构化环境的气动软体机器人,方法包括:
技术总结
本申请公开了一种用于空间受限非结构化环境的气动软体机器人及控制方法,其中机器人包括:依次设置的载荷平台、前锚定单元、伸缩单元、后锚定单元、气电一体管线、气源及控制器;所述前锚定单元包括前锚定单元电磁阀;所述后锚定单元包括后锚定单元电磁阀;所述前锚定单元通过所述前锚定单元电磁阀与所述伸缩单元实现气路的连接;所述前锚定单元通过所述后锚定单元电磁阀以及所述气电一体管线与所述气源实现气路的连接;所述气源以及所述控制器用于通过所述气电一体管线共同调整所述前锚定单元、所述伸缩单元以及所述后锚定单元的体积和形状。本机器人适应变化的环境具有更好的实用性。本申请可广泛应用于软体机器人技术领域。
技术研发人员:罗宗富,赵子曰,侯宛廷,殷茵,庄琪,张涛,张传富
受保护的技术使用者:中山大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!