基于时间卷积网络的工业机器人能耗预测方法
本发明属于工业机器人,具体的为一种基于时间卷积网络的工业机器人能耗预测方法。
背景技术:
1、工业机器人的能耗计算需要先获得其机械臂惯性参数,如质量、重心、惯性张量;传动系统摩擦系数,如库伦摩擦系数、粘滞摩擦系数;以及驱动系统的电学参数,如永磁同步电机的电枢电感、反电动势常数、电机转矩常数、转子转到惯量,整流器和逆变器的导通和开关损耗系数等。但由于工业机器人的商用特性,用户往往无法获得相应的参数。因此,在工程应用中,上述工业机器人能耗计算所需的电学及动力学参数必须通过复杂的参数实验辨识来获得,这使得工业机器人能耗计算工作量大且存在较大偏差。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种基于时间卷积网络的工业机器人能耗预测方法,通过运行多条机器人关节轨迹并采集其能耗值和关节运动变量值,在无需获取任何机器人电学及动力学参数的条件下,完成对预设任务下工业机器人关节轨迹不同时间缩放规律下的能耗预测。
2、为达到上述目的,本发明提供如下技术方案:
3、一种基于时间卷积网络的工业机器人能耗预测方法,所述时间卷积网络包括关节轨迹变时间尺度缩放模块、数据预处理层、时间卷积层以及功率输出和积分模块;所述方法包括如下步骤:
4、步骤一:利用关节轨迹变时间尺度缩放模块将参考关节轨迹qr(tr)和均匀时间间隔序列δ转换为变时间尺度缩放轨迹qs(t)和变时间尺度缩放时间间隔序列hk;基于变时间尺度缩放轨迹qs(t)和变时间尺度缩放时间间隔序列hk构建得到工业机器人功率及能耗方程:
5、
6、
7、其中,pac(t)表示工业机器人的功率;eac(t)表示工业机器人的能耗;表示非线性因果关系函数;qs(t)表示变时间尺度缩放轨迹,即关节位置;表示变时间尺度缩放轨迹qs(t)对时间t的一阶导数,即关节速度;表示变时间尺度缩放轨迹qs(t)对时间t的二阶导数,即关节加速度;n为时间轴上控制段的数量;
8、步骤二:以hk、qs(t)、和作为输入,利用数据预处理层对输入数据序列进行标准化、归一化处理,按照能耗水平以分层采样方式将数据序列划分为训练集、验证集和测试集;
9、步骤三:将训练集输入时间卷积层以提取变时间尺度缩放轨迹qs(t)、关节速度和关节加速度的特征信息以及工业机器人的功率及能耗与关节轨迹qs(t)、速度加速度之间的因果关系;
10、步骤四:功率输出和积分模块根据时间卷积层提取得到的因果关系得到功率的预测值,进而得到工业机器人功率预测序列和能耗预测序列;
11、步骤五:基于工业机器人功率预测序列和能耗预测序列分别判断功率及能耗的预测值与真实值之间的误差是否均小于设定阈值:若是,则执行步骤七;若否,则执行步骤六;
12、步骤六:采用反向传播算法更新时间卷积网络的权重,执行步骤三;
13、步骤七:分别以验证集和测试集对功率及能耗的预测精度进行验证和测试;
14、步骤八:取任意期望执行的工业机器人的关节轨迹qs(t),利用时间卷积网络预测工业机器人执行该轨迹时的功率及能耗。
15、进一步,所述步骤一中,将参考关节轨迹qr(tr)和均匀时间间隔序列δ转换为变时间尺度缩放轨迹qs(t)和变时间尺度缩放时间间隔序列hk的方法步骤为:
16、11)对参考关节轨迹qr(tr)在时间轴tr上均匀设置u0,u1,u2,…,un-1,un共n+1个控制时刻点,并将时间轴均分为n个控制段,令δ=uk+1-uk,0≤k≤n,则δ为常数;
17、12)对控制段[uk,uk+1]上的关节参考轨迹qr(tr)进行变时间尺度动态缩放,缩放前后的函数关系为:
18、tr=u(t),
19、qs(t)=qr(tr)=qr(u(t)),
20、
21、
22、其中,u为变时间尺度缩放函数;和分别为u对t的一阶导数和二阶导数;t为缩放后的关节轨迹执行时间变量;
23、13)令在控制段[uk,uk+1]内为常数,则u、t在控制段[uk,uk+1]上满足时间缩放状态空间表达式:
24、
25、其中,hk表示变时间尺度缩放时间间隔序列,且:
26、hk=tk+1-tk
27、其中,tk为uk经变时间尺度缩放后得到的控制时刻点。
28、进一步,所述时间卷积层有n个残差块串联构成,每个残差块包括因果空洞卷积、权重归一化函数、relu激活函数、dropout随机失活机制和1×1卷积。
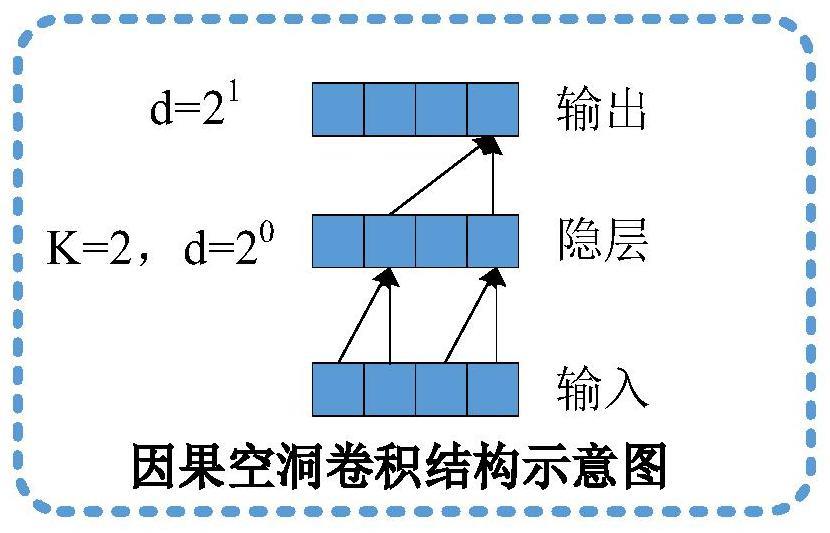
29、进一步,所述因果空洞卷积的原理为:
30、
31、其中,f=(f1,f2,...,fm)为卷积核,fi为第i个卷积核,i=1,2,…,m;x=(x0,x1,...,xk)为输入数据,xk表示第tk时刻的输入数据;*为卷积运算符;m为卷积核大小,d为膨胀因子。
32、进一步,所述时间卷积层采用并行计算方式提取变时间尺度缩放轨迹qs(t)、关节速度和关节加速度的特征信息以及工业机器人的功率及能耗与关节轨迹、速度、加速度之间的因果关系。
33、进一步,所述步骤五中,以均方差mse表征功率预测误差:
34、
35、其中,pac(tk)为控制时刻点tk的实测功率值,为时间卷积网络预测得到的控制时刻点tk的功率预测值;l为变时间尺度轨迹样本个数;n为时间轴上控制段的数量;
36、以平均绝对百分比误差mape表征能耗预测误差:
37、
38、其中,eac,i为第i条轨迹的总能耗值;为时间卷积网络输出的第i条轨迹的总能耗值。
39、本发明的有益效果在于:
40、本发明基于时间卷积网络的工业机器人能耗预测方法,通过构建包括关节轨迹变时间尺度缩放模块、数据预处理层、时间卷积层以及功率输出和积分模块的时间卷积网络,利用关节轨迹变时间尺度缩放模块将参考关节轨迹qr(tr)和均匀时间间隔序列δ转换为变时间尺度缩放轨迹qs(t)和变时间尺度缩放时间间隔序列hk,从而实现将功率及能耗方程进行离散化表示,得出功率及能耗与关节位置qs(t)、关节速度和关节加速度之间具有非线性因果关系,如此,以关节位置qs(t)、关节速度关节加速度以及变时间尺度缩放时间间隔序列hk作为输入,利用时间卷积层提取功率及能耗与关节轨迹qs(t)、速度加速度之间的因果关系,从而可以得到工业机器人功率及能耗的预测值;即本发明基于时间卷积网络的工业机器人能耗预测方法,通过运行多条机器人关节轨迹并采集其能耗值和关节运动变量值,在无需获取任何机器人电学及动力学参数的条件下,完成对预设任务下工业机器人关节轨迹不同时间缩放规律下的能耗预测。
技术特征:
1.一种基于时间卷积网络的工业机器人能耗预测方法,其特征在于:所述时间卷积网络包括关节轨迹变时间尺度缩放模块、数据预处理层、时间卷积层以及功率输出和积分模块;所述方法包括如下步骤:
2.根据权利要求1所述基于时间卷积网络的工业机器人能耗预测方法,其特征在于:所述步骤一中,将参考关节轨迹qr(tr)和均匀时间间隔序列δ转换为变时间尺度缩放轨迹qs(t)和变时间尺度缩放时间间隔序列hk的方法步骤为:
3.根据权利要求1所述基于时间卷积网络的工业机器人能耗预测方法,其特征在于:所述时间卷积层有n个残差块串联构成,每个残差块包括因果空洞卷积、权重归一化函数、relu激活函数、dropout随机失活机制和1×1卷积。
4.根据权利要求2所述基于时间卷积网络的工业机器人能耗预测方法,其特征在于:所述因果空洞卷积的原理为:
5.根据权利要求2所述基于时间卷积网络的工业机器人能耗预测方法,其特征在于:所述时间卷积层采用并行计算方式提取变时间尺度缩放轨迹qs(t)、关节速度和关节加速度的特征信息以及工业机器人的功率及能耗与关节轨迹、速度、加速度之间的因果关系。
6.根据权利要求1所述基于时间卷积网络的工业机器人能耗预测方法,其特征在于:所述步骤五中,以均方差mse表征功率预测误差:
技术总结
本发明公开了一种基于时间卷积网络的工业机器人能耗预测方法,利用关节轨迹变时间尺度缩放模块将参考关节轨迹q<subgt;r</subgt;(t<subgt;r</subgt;)和均匀时间间隔序列Δ转换为变时间尺度缩放轨迹q<subgt;s</subgt;(t)和变时间尺度缩放时间间隔序列h<subgt;k</subgt;,实现将功率及能耗方程进行离散化表示,得出功率及能耗与关节位置q<subgt;s</subgt;(t)、关节速度和关节加速度之间具有非线性因果关系,如此,以q<subgt;s</subgt;(t)、以及h<subgt;k</subgt;作为输入,利用时间卷积层提取与功率及能耗的因果关系,从而可以得到功率及能耗的预测值;即本发明基于时间卷积网络的工业机器人能耗预测方法,通过运行多条机器人关节轨迹并采集其能耗值和关节运动变量值,在无需获取任何机器人电学及动力学参数的条件下,完成对预设任务下工业机器人关节轨迹不同时间缩放规律下的能耗预测。
技术研发人员:江沛,王作学,李孝斌,尹超,郑嘉骏,杨博栋
受保护的技术使用者:重庆大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!