一种人工智能教育机器人的平衡结构
本发明属于教育机器人配件,特别是涉及一种人工智能教育机器人的平衡结构。
背景技术:
1、随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多,在教育领域,尤其是儿童教育范畴,也出现一系列的含有教育功能的机器人,教育机器人不光用于儿童的启蒙教育,同时也是儿童的玩伴,但现有的教育机器人在实际的使用中存在以下的不足:
2、1.因为教育机器人含有一定的精密器件,而儿童又处于多动的年纪,在使用的时候,儿童往往会因为好奇而去拨弄机器人,极易造成机器人的损害,同时儿童自身也存在一定的安全隐患(如误吞零件等);
3、2.因为教育机器人含有一定的交互配件(如显示屏等),而很多教育机器人又设置有自动移动状态,在机器人移动的过程中,极易出现磕碰、倾覆,从而导致交互配件的损坏;
4、因此,有必要对现有技术进行改进,以解决上述技术问题。
技术实现思路
1、本发明的目的在于提供一种安全性好且行走稳定的人工智能教育机器人的平衡结构,解决了现有的教育机器人在使用时存在安全性低和行走稳定性差的问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
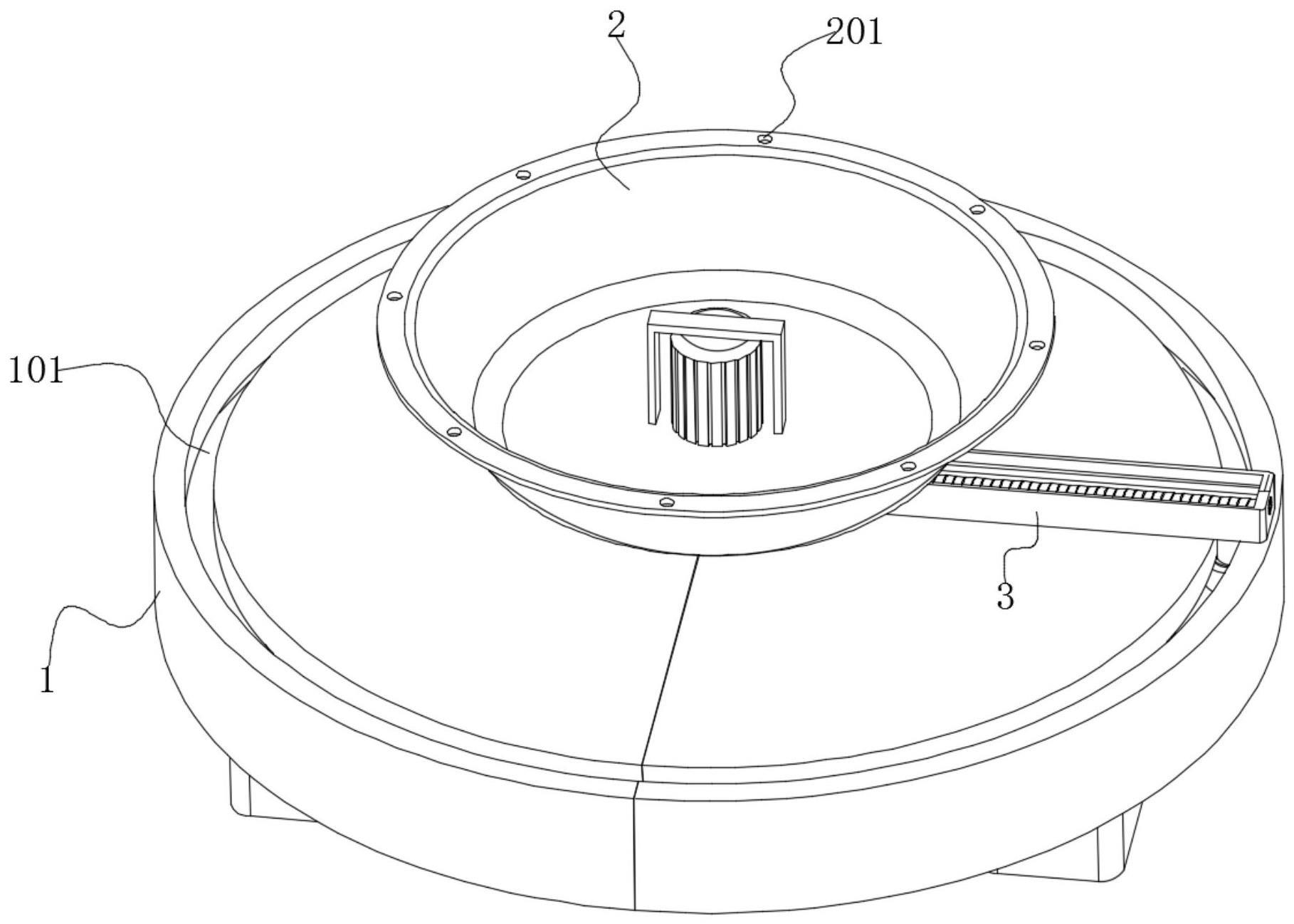
3、本发明为一种人工智能教育机器人的平衡结构,包括从下往上呈同轴设置的底座盘和连接盘,底座盘的上方还沿径线方向设置调节杆,且调节杆的顶面上开设有调节槽,调节槽中沿长侧边方向设置有螺丝杆,且螺丝杆的两端均通过滚动轴承转动连接在调节杆上,螺丝杆上螺旋配合有活动块,且活动块间隙配合在调节槽中;调节杆的底面一侧固定连接有第一转动轴,且第一转动轴的下端嵌合在第一电机的输出端中,底座盘的中心位置开设有用于第一转动轴滑动穿过的通孔,且底座盘的底面上开设有用于第一电机放置的矩形凹槽;活动块的顶面上固设有第二转动轴,第二转动轴的上端滑动穿过连接盘底板嵌合在第二电机的输出端中,且第二电机固定连接在连接盘内底面上。
4、进一步地,螺丝杆的一端延伸至调节杆外侧嵌合在第三电机的输出端中,且第三电机固定连接在调节杆的端面上。
5、进一步地,螺丝杆两侧的调节槽中呈对称设置有导向条,活动块上开设有用于导向条间隙配合的导向槽。
6、进一步地,相对于设置有第一转动轴的调节杆另一端底面上固设有转动柱,转动柱的下端通过滚动轴承转动连接有滚轮,底座盘的顶面上沿周向开设有用于滚轮间隙配合的导轨槽。
7、进一步地,第二转动轴外侧的活动块顶面上固设有支撑套,支撑套的顶面上固设有限位环,连接盘的底面上开设有用于限位环间隙配合的限位槽。
8、进一步地,支撑套的下端外侧壁上沿周向阵列固设有多个加强楞,且加强楞与活动块的顶面固定连接。
9、进一步地,连接盘的顶面外沿边上沿周向阵列开设有多个安装孔。
10、进一步地,底座盘由两个呈对称的半圆板组成,第一电机上固定套接有矩形框,矩形框呈对称的两侧均设置有支撑板,支撑板的上下端分别滑动套接有第一连接柱和第二连接柱,第一连接柱的两端均通过第一连接片固定连接在矩形框上,第二连接柱的两端均通过第二连接片固定连接在半圆板上;其中一个半圆板的底面上固设有电动推杆,且电动推杆的伸缩端上固设有固定片,固定片固定连接在另一个半圆板的底面上。
11、进一步地,支撑板两侧的第一连接柱和第二连接柱上均滑动套接有复位弹簧,复位弹簧的两端分别固定连接在支撑板和第一连接片或第二连接片上。
12、进一步地,其中一个半圆板位于矩形凹槽的两侧位置均固设有插板,另一个半圆板上开设有用于插板间隙配合的插槽;半圆板的底面上还固定安装有驱动轮组。
13、本发明具有以下有益效果:
14、1、本发明在使用时,机器人的交互及主控装置安装在连接盘上,通过第一电机的工作,可以实现调节杆以第一转动轴为轴进行转动,通过第三电机的工作,可以实现活动块沿螺丝杆的轴线方向上进行移动,通过上述设置的配合,可以实现机器人的主体在水平方向上的位置移动,再配合以机器人主体上的红外感应装置的设置,可以在儿童手部碰触装置之前,机器人的主体会根据情况进行自动避让,避免儿童对机器人主体的触摸,在保护机器人的同时,可以降低儿童自身的安全隐患。
15、2、本发明在使用时,通过电动推杆的伸出,可以实现两个半圆板向相反的方向移动,因为支撑板两端分别与第一连接柱和第二连接柱滑动套接的设置,在两个半圆板向相反方向移动时,整个第一电机会向下移动,进而实现机器人主体的向下移动,从而在移动时,降低整个机器人的重心,保证输送时的稳定性,提高装置的使用寿命。
技术特征:
1.一种人工智能教育机器人的平衡结构,包括从下往上呈同轴设置的底座盘(1)和连接盘(2),其特征在于:所述底座盘(1)的上方还沿径线方向设置调节杆(3),且调节杆(3)的顶面上开设有调节槽,所述调节槽中沿长侧边方向设置有螺丝杆(301),且螺丝杆(301)的两端均通过滚动轴承转动连接在调节杆(3)上,所述螺丝杆(301)上螺旋配合有活动块(5),且活动块(5)间隙配合在调节槽中;
2.如权利要求1所述的一种人工智能教育机器人的平衡结构,其特征在于:所述螺丝杆(301)的一端延伸至调节杆(3)外侧嵌合在第三电机(3011)的输出端中,且第三电机(3011)固定连接在调节杆(3)的端面上。
3.如权利要求2所述的一种人工智能教育机器人的平衡结构,其特征在于:所述螺丝杆(301)两侧的所述调节槽中呈对称设置有导向条(304),所述活动块(5)上开设有用于导向条(304)间隙配合的导向槽(503)。
4.如权利要求1或3所述的一种人工智能教育机器人的平衡结构,其特征在于:相对于设置有第一转动轴(3031)的所述调节杆(3)另一端底面上固设有转动柱(3021),所述转动柱(3021)的下端通过滚动轴承转动连接有滚轮(302),所述底座盘(1)的顶面上沿周向开设有用于滚轮(302)间隙配合的导轨槽(101)。
5.如权利要求4所述的一种人工智能教育机器人的平衡结构,其特征在于:所述第二转动轴(5011)外侧的所述活动块(5)顶面上固设有支撑套(502),所述支撑套(502)的顶面上固设有限位环(5021),所述连接盘(2)的底面上开设有用于限位环(5021)间隙配合的限位槽(202)。
6.如权利要求5所述的一种人工智能教育机器人的平衡结构,其特征在于:所述支撑套(502)的下端外侧壁上沿周向阵列固设有多个加强楞(5022),且加强楞(5022)与活动块(5)的顶面固定连接。
7.如权利要求1所述的一种人工智能教育机器人的平衡结构,其特征在于:所述连接盘(2)的顶面外沿边上沿周向阵列开设有多个安装孔(201)。
8.如权利要求1、3、6或7所述的一种人工智能教育机器人的平衡结构,其特征在于:所述底座盘(1)由两个呈对称的半圆板(106)组成,所述第一电机(303)上固定套接有矩形框(4),所述矩形框(4)呈对称的两侧均设置有支撑板(401),所述支撑板(401)的上下端分别滑动套接有第一连接柱(402)和第二连接柱(1041),所述第一连接柱(402)的两端均通过第一连接片(4021)固定连接在矩形框(4)上,所述第二连接柱(1041)的两端均通过第二连接片(1042)固定连接在半圆板(106)上;
9.如权利要求8所述的一种人工智能教育机器人的平衡结构,其特征在于:所述支撑板(401)两侧的第一连接柱(402)和第二连接柱(1041)上均滑动套接有复位弹簧(403),所述复位弹簧(403)的两端分别固定连接在支撑板(401)和第一连接片(4021)或第二连接片(1042)上。
10.如权利要求9所述的一种人工智能教育机器人的平衡结构,其特征在于:其中一个半圆板(106)位于矩形凹槽(104)的两侧位置均固设有插板(1061),另一个半圆板(106)上开设有用于插板(1061)间隙配合的插槽(1062);
技术总结
本发明公开了一种人工智能教育机器人的平衡结构,涉及教育机器人配件技术领域。本发明包括从下往上呈同轴设置的底座盘和连接盘,底座盘的上方还沿径线方向设置调节杆,且调节杆的顶面上开设有调节槽,调节槽中沿长侧边方向设置有螺丝杆,且螺丝杆的两端均通过滚动轴承转动连接在调节杆上,螺丝杆上螺旋配合有活动块,且活动块间隙配合在调节槽中;调节杆的底面一侧固定连接有第一转动轴,且第一转动轴的下端嵌合在第一电机的输出端中,底座盘的中心位置开设有用于第一转动轴滑动穿过的通孔。本发明在使用时,可以对儿童的动作进行及时避让,提高使用的安全性,同时本装置整体在移动时稳定性好,使用寿命长。
技术研发人员:介启源
受保护的技术使用者:河海大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!