一种基于足底传感器的下肢外骨骼自适应速度方法与流程
本发明涉及外骨骼领域,特别涉及一种基于足底传感器的下肢外骨骼自适应速度方法。
背景技术:
1、可穿戴外骨骼机器人是通过人机交互实现运动控制的机器人,在军事国防、农业生产、医疗康复、工业生产等方面都有着广泛的实际应用需求。外骨骼机器人是基于仿生学和人体过程学设计的可穿戴式机械装置,由于人类体能与身体疲劳的限制,人类可承受外界负载界限以及持续工作的范围都有一定的限制,而外骨骼机器人可以通过传感器完成对穿戴者活动状态的检测,通过计算后完成对各个驱动关节的控制,从而使得穿戴者承受更大范围的负载而不损耗自身体能或者耗损很小,帮助穿戴者长时间作业。
2、目前下肢外骨骼存在的运动控制算法追踪人体髋关节和膝关节期望轨迹时存在误差。国外加州伯克利大学研究团队采用位置控制和灵敏度放大控制的混合控制算法研制的下肢外骨骼;日本筑波大学采集人体皮肤上的生物电流判断穿戴者的运动意图,控制外骨骼机器人随佩戴者一起运动等;都存在人机跟随性能差的问题。
技术实现思路
1、本发明的目的在于提供一种基于足底传感器的下肢外骨骼自适应速度方法,提高下肢外骨骼的人机跟随性能。
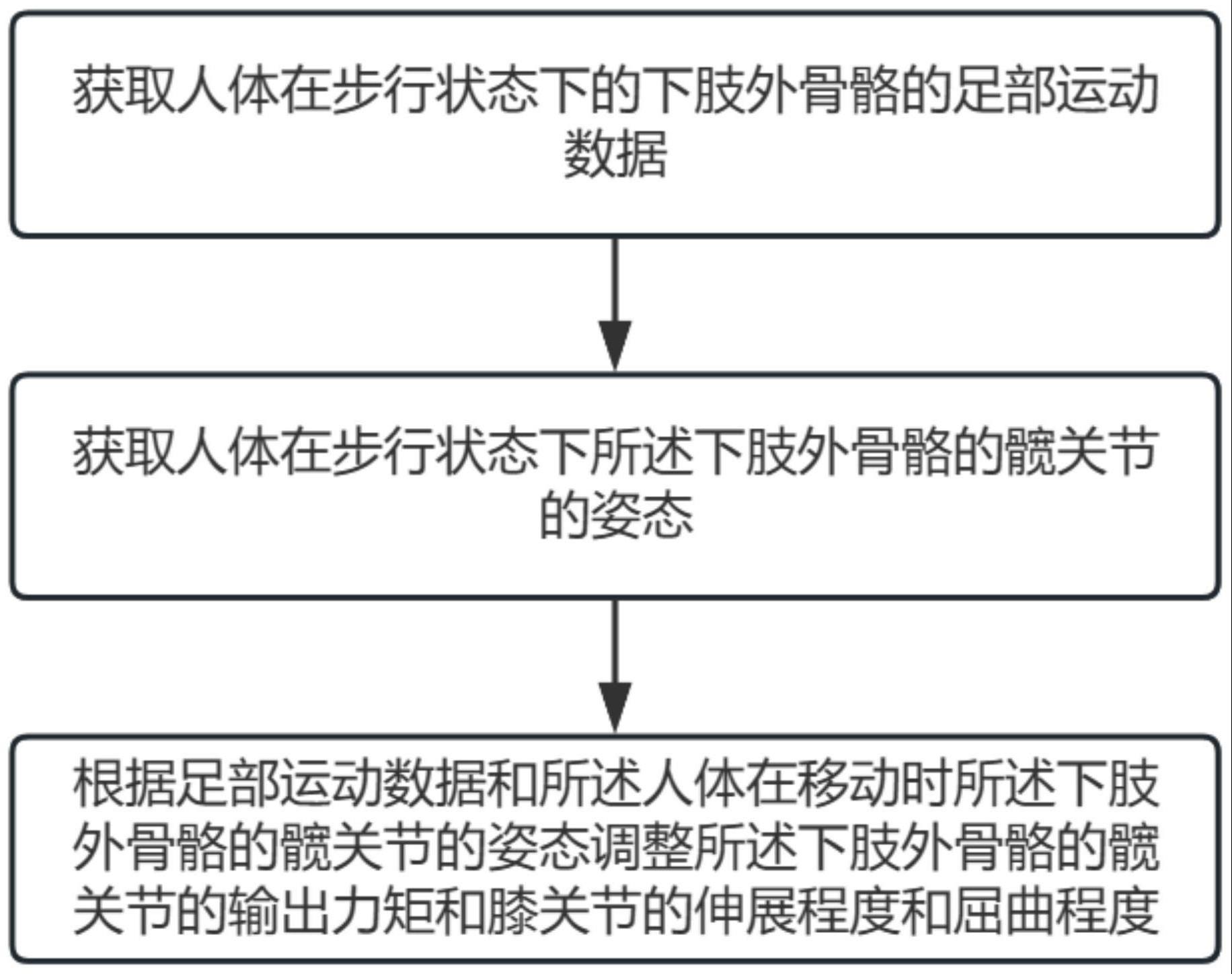
2、为了实现上述目的,本发明提供如下技术方案:一种基于足底传感器的下肢外骨骼自适应速度方法,下肢外骨骼具有配合人体髋部运动的髋关节和配合人体腿部运动的膝关节,包括:s1:获取人体在步行状态下的下肢外骨骼的足部运动数据;s2:获取人体在步行状态下所述髋关节的姿态;s3:根据足部运动数据和所述髋关节的姿态调整所述髋关节的输出力矩和膝关节的伸展程度和屈曲程度;所述步骤s3包括:s31:基于所述足部运动数据计算出人体当前的步行周期;s32:根据当前的步行周期中所述髋关节在各个时刻的角度计算出所述膝关节的伸展程度和屈曲程度参考量;s33:根据当前所述步行周期的时间长度确定在下一个所述步行周期中所述髋关节的输出力矩,并根据所述膝关节的伸展程度和屈曲程度参考量控制所述下肢外骨骼的膝关节在下一个所述步行周期中各个时刻的活动程度。
3、进一步地,所述下肢外骨骼的双脚均设有传感器,所述传感器能够检测所述下肢外骨骼的足部与地面的接触状态。
4、进一步地,所述足部运动数据包括:同一侧的所述下肢外骨骼的脚部从触地到下一次离地所经过的时间。
5、进一步地,所述髋关节的姿态包括:人体在步行状态下的所述下肢外骨骼的髋关节在各个时刻的角度。
6、进一步地,还包括继电器模块,所述继电器模块能够将所述传感器采集到的压力值转换为脉冲信号。
7、分析可知,本发明公开一种基于足底传感器的下肢外骨骼自适应速度方法,本方法能够保证在现有的控制基础上正常使用,同时又提高了人机交互的跟随性,从而有效的使下肢外骨骼适应人体速度。
技术特征:
1.一种基于足底传感器的下肢外骨骼自适应速度方法,下肢外骨骼具有配合人体髋部运动的髋关节和配合人体腿部运动的膝关节,其特征在于,包括:
2.根据权利要求1所述的一种基于足底传感器的下肢外骨骼自适应速度方法,其特征在于,所述下肢外骨骼的双脚均设有传感器,所述传感器能够检测所述下肢外骨骼的足部与地面的接触状态。
3.根据权利要求2所述的一种基于足底传感器的下肢外骨骼自适应速度方法,其特征在于,所述足部运动数据包括:同一侧的所述下肢外骨骼的脚部从触地到下一次离地所经过的时间。
4.根据权利要求3所述的一种基于足底传感器的下肢外骨骼自适应速度方法,其特征在于,所述髋关节的姿态包括:人体在步行状态下的所述下肢外骨骼的髋关节在各个时刻的角度。
5.根据权利要求4所述的一种基于足底传感器的下肢外骨骼自适应速度方法,其特征在于,所述步骤s3包括:
6.根据权利要求5所述的一种基于足底传感器的下肢外骨骼自适应速度方法,其特征在于,还包括继电器模块,所述继电器模块能够将所述传感器采集到的压力值转换为脉冲信号。
技术总结
本发明提供一种基于足底传感器的下肢外骨骼自适应速度方法,下肢外骨骼具有配合人体髋部运动的髋关节和配合人体腿部运动的膝关节,包括:S1:获取人体在步行状态下的下肢外骨骼的足部运动数据;S2:获取人体在步行状态下所述髋关节的姿态;S3:根据足部运动数据和所述髋关节的姿态调整所述髋关节的输出力矩和膝关节的伸展程度和屈曲程度,本发明公开一种基于足底传感器的下肢外骨骼自适应速度方法,本方法能够保证在现有的控制基础上正常使用,同时又提高了人机交互的跟随性,从而有效的使下肢外骨骼适应人体速度。
技术研发人员:张楠,黄显道,芮岳峰,曹文洁,陈浩,张嘉梁,王春雷,崔朕铭,姬厚召
受保护的技术使用者:上海微电机研究所(中国电子科技集团公司第二十一研究所)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!