一种设施番茄用田间管理多功能机器人及其使用方法
本发明属于机器人,具体涉及一种设施番茄用田间管理多功能机器人及其使用方法。
背景技术:
1、针对于设施农业而言,设施农业近年来在我国得到的较大的发展,设施农业通过工程技术手段,实现了标准化种植,以实现作物的高效生产。
2、其中设施番茄为吊生生长,番茄果实形状基本固定且成熟后果实颜色变化明显,且番茄茎的生长状态由于捆绑吊生,茎秆较直且结果位置相对较低,相比于其他果蔬而言,设施番茄更容易实现机械化采摘,随着设施番茄种植面积的逐渐扩大,单纯的人力劳作已经难以满足田间的管理、采收等需求,因此需要一种番茄田间管理机器人解决上述问题。
技术实现思路
1、为了解决上述现有技术中存在的问题,本发明提供了一种设施番茄用田间管理多功能机器人及其使用方法,通过本发明的使用方法使用机器人,可以实现设施番茄的机械化采摘与田间管理,减少人力成本,降低工作人员的劳动量。
2、本发明采用的具体技术方案是:
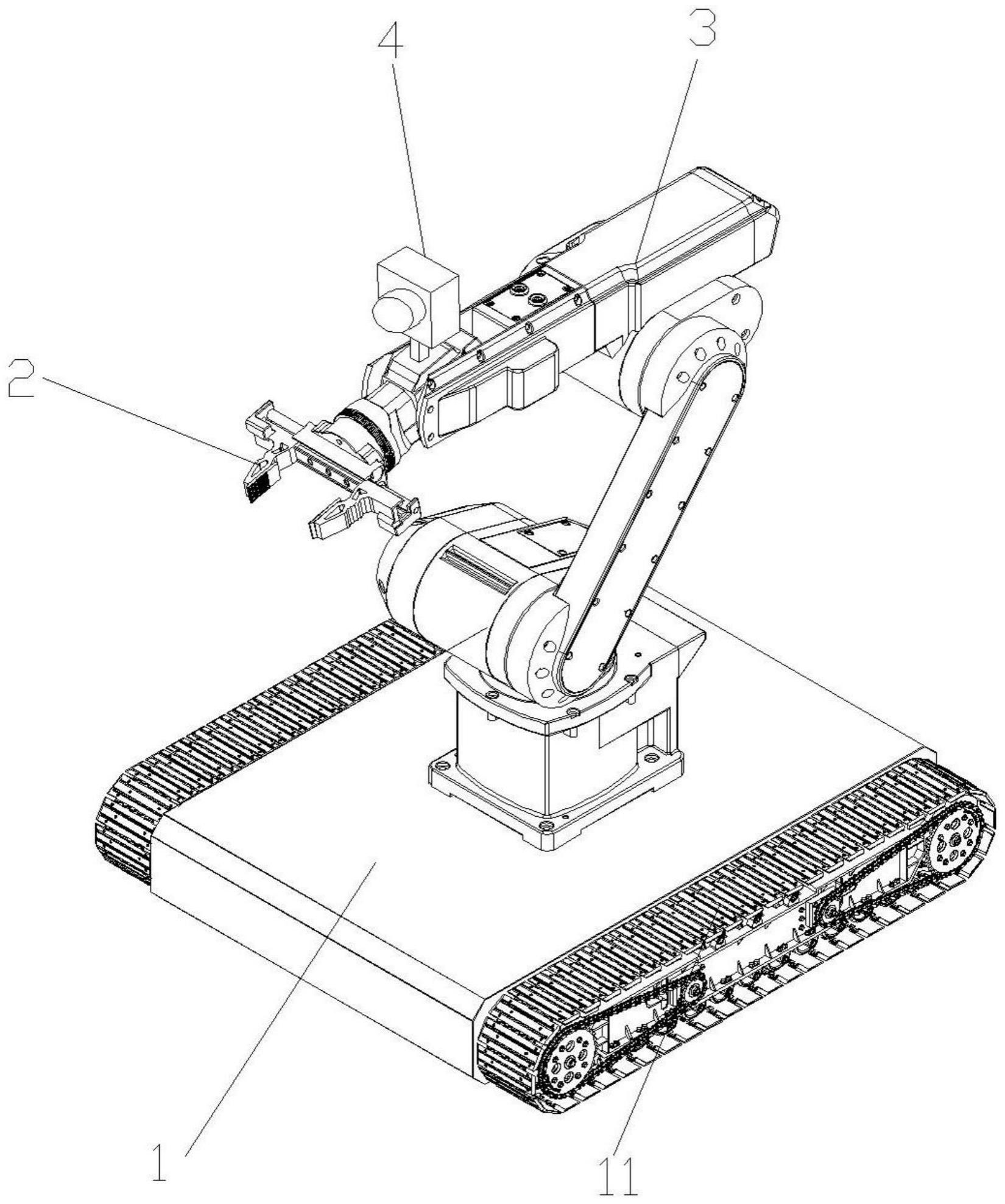
3、一种设施番茄用田间管理多功能机器人,包括移动底盘,还包括采收模块和喷药模块,所述采收模块包括采收爪以及机械臂,所述机械臂与移动底盘固定连接,所述采收爪设置在机械臂的自由端,所述采收模块还包括摄像头和吸盘,所述摄像头设置在机械臂的自由端,所述吸盘借助设置在机械臂自由端的伸缩缸具有相对机械臂自由端伸缩的自由度。
4、所述喷药模块包括固定架、储药桶和喷枪,所述固定架与储药桶分别与移动底盘固定,所述固定架包括一对竖直方向的支撑杆,所述支撑杆与移动底盘固定,所述固定架还包括横架于支撑杆上方的横杆以及固定于横杆两侧的竖直方向的辅助杆,所述横杆与辅助杆均呈中空结构,所述喷枪借助辅助杆固定并与辅助杆的中空腔连通,所述储药桶内还设置有水泵,所述水泵的输出端借助连接管与横杆的中空腔连通。
5、所述喷枪于固定架两侧对称设置有两组,每组喷枪包括分别位于辅助杆上方和位于辅助杆下方的两个喷枪,所述两个喷枪的方向对称,所述喷枪与辅助杆所在直线的锐角呈40°-60°。
6、所述辅助杆上设置有多个截止阀,所述截止阀位于喷枪与横杆之间的辅助杆上,所述喷枪借助截止阀打开或关闭。
7、所述移动底盘两侧设置有履带,所述移动底盘借助履带移动。
8、所述机械臂为六轴机械臂。
9、基于上述的一种设施番茄用田间管理多功能机器人的使用方法,包括以下步骤:
10、s1、视觉定位,在田间巡视期间,借助摄像头对位于机器人一侧的待采收的番茄植株进行图像采集,获取第一图像,根据预设的成熟果实颜色,对植株上待采果实定位,若发现待采收果实,则机器人停止巡视,进入采收动作;
11、s2、采收动作,借助移动底盘和机械臂移动采收爪,根据步骤s1中待采果实的定位参数,移动采收爪对齐至待采果实图像中心所在高度平面;
12、s3、驱动采收爪将待采果实夹持固定;
13、s4、借助摄像头对待采果实进行二次图像采集,获取第二图像,确定所抓取的待采果实与其果柄连接处的坐标;
14、s5、以待采果实与其果柄连接处坐标为圆心,借助机械臂旋转采收爪,通过采收爪带动待采果实旋转扭断果柄,将果实置入收集篮内,完成采收。
15、步骤s2对待采果实夹持固定前对其进行遮挡判定,当第一图像显示待采果实形状呈浑圆状时,则判定无果柄或茎叶遮挡果实,采收爪伸出将待采果实固定夹持;
16、当第一图像中待采果实非浑圆状时,则判定有果柄或茎叶遮挡果实,若第一图像中待采果实暴露区域面积大于吸盘面积,此时吸盘伸出并吸附待采果实的该暴露区域,然后借助吸盘后撤拉拽待采果实,摄像头获取修正图像,若待采果实恢复至浑圆状,此时重新判定无果柄或茎叶遮挡果实,采收爪将待采果实固定夹持。
17、本发明的有益效果是:
18、1、本发明的机器人在对成熟果实进行采收时,由于番茄茎的生长状态由于捆绑吊生,茎秆较直且结果位置相对较低,因此机器人的采收爪可以较为容易的抓取番茄,在采收时利用机械臂带动采收爪以番茄茎与果实连接处为中心旋转,利用旋转的方式将番茄果实折断。
19、2、本发明的机器人在采收过程中,可能会出现果柄或茎叶位于采收爪与待采收果实之间的情况,导致在采收爪旋转的过程中,会拉拽果柄或茎叶,使番茄植株遭到破坏,因此本发明还设置有摄像头和吸盘,通过摄像头判定待采果实是否被果柄或茎叶遮挡,若待采果实被遮挡,则利用吸盘吸住待采果实,并利用伸缩缸使吸盘与果实后撤,使果实避开果柄或茎叶,从而避免采收爪采收的过程中拉拽果柄或茎叶,防止番茄植株遭到破坏。
20、3、本发明中机器人使用方法系统的阐述了机器人在采收过程中的使用方法及判定方法,可以适用于设施番茄在采摘过程中发生的多种情况,通过多次图像获取,保证机器人所摘取的番茄为成熟的,且摘取过程中借助判定方法及吸盘,保证采收过程中不会拉拽、旋转茎叶,避免番茄植株受损,影响后续产量。
21、4、本发明中的机器人除了采收模块还设置有喷药模块,可以实现对设施番茄的田间多功能管理,喷药模块结构简单,其横杆与辅助杆均采用pvc管,不仅价格低廉,并在起到固定作用的同时还起到了水管的作用。
技术特征:
1.一种设施番茄用田间管理多功能机器人,包括移动底盘(1),其特征在于,还包括采收模块和喷药模块,所述采收模块包括采收爪(2)以及机械臂(3),所述机械臂(3)与移动底盘(1)固定连接,所述采收爪(2)设置在机械臂(3)的自由端,所述采收模块还包括摄像头(4)和吸盘(5),所述摄像头(4)设置在机械臂(3)的自由端,所述吸盘(5)借助设置在机械臂(3)自由端的伸缩缸(6)具有相对机械臂(3)自由端伸缩的自由度。
2.根据权利要求1所述的一种设施番茄用田间管理多功能机器人,其特征在于,所述喷药模块包括固定架、储药桶(7)和喷枪(8),所述固定架与储药桶(7)分别与移动底盘(1)固定,所述固定架包括一对竖直方向的支撑杆(9),所述支撑杆(9)与移动底盘(1)固定,所述固定架还包括横架于支撑杆(9)上方的横杆(13)以及固定于横杆(13)两侧的竖直方向的辅助杆(10),所述横杆(13)与辅助杆(10)均呈中空结构,所述喷枪(8)借助辅助杆(10)固定并与辅助杆(10)的中空腔连通,所述储药桶(7)内还设置有水泵(12),所述水泵(12)的输出端借助连接管与横杆(13)的中空腔连通。
3.根据权利要求2所述的一种设施番茄用田间管理多功能机器人,其特征在于,所述喷枪(8)于固定架两侧对称设置有两组,每组喷枪(8)包括分别位于辅助杆(10)上方和位于辅助杆(10)下方的两个喷枪(8),所述两个喷枪(8)的方向对称,所述喷枪(8)与辅助杆(10)所在直线的锐角呈40°-60°。
4.根据权利要求2所述的一种设施番茄用田间管理多功能机器人,其特征在于,所述辅助杆(10)上设置有多个截止阀(14),所述截止阀(14)位于喷枪(8)与横杆(13)之间的辅助杆(10)上,所述喷枪(8)借助截止阀(14)打开或关闭。
5.根据权利要求1所述的一种设施番茄用田间管理多功能机器人,其特征在于,所述移动底盘(1)两侧设置有履带(11),所述移动底盘(1)借助履带(11)移动。
6.根据权利要求1所述的一种设施番茄用田间管理多功能机器人,其特征在于,所述机械臂(3)为六轴机械臂。
7.基于权利要求1所述一种设施番茄用田间管理多功能机器人的使用方法,其特征在于,包括以下步骤:
8.根据权利要求7所述一种设施番茄用田间管理多功能机器人的使用方法,其特征在于,步骤s2对待采果实夹持固定前对其进行遮挡判定,当第一图像显示待采果实形状呈浑圆状时,则判定无果柄或茎叶遮挡果实,采收爪(2)伸出将待采果实固定夹持;
技术总结
本发明属于机器人技术领域,具体涉及一种设施番茄用田间管理多功能机器人,包括移动底盘,还包括采收模块和喷药模块,所述采收模块包括采收爪以及机械臂,所述机械臂与移动底盘固定连接,所述采收爪设置在机械臂的自由端,所述采收模块还包括摄像头和吸盘,所述摄像头设置在机械臂的自由端,所述吸盘借助设置在机械臂自由端的伸缩缸具有相对机械臂自由端伸缩的自由度。本发明还提供了一种设施番茄用田间管理多功能机器人的使用方法,通过本发明的机器人及其使用方法,可以实现设施番茄的机械化采摘与田间管理,减少人力成本,降低工作人员的劳动量。
技术研发人员:张岳魁,付珂,李娟,褚云霞,李志祥,李尧,张军,贾子恒,师建华,王丹丹
受保护的技术使用者:石家庄学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!