一种绳牵引并联机器人的控制方法、装置、设备和介质
本发明涉及绳牵引并联机器人控制,具体而言,涉及一种绳牵引并联机器人的控制方法、装置、设备和介质。
背景技术:
1、工业机器人作为智能制造和制造业产业升级的重要载体,其在工业制造业领域中,被广泛用于重物搬运、码垛、装配、加工等场合。国内目前应用最为广泛的搬运机器人为四轴、六轴串联机械臂。然而无论是四轴还是六轴搬运机器人应用场景均受限于结构、速度和承载能力很难兼顾,且串联机器人广泛存在累计误差大、定位精度差等不足,在高精度场合下并不适用。
2、因此,绳牵引并联机器人凭借其优越的机构特性,得到了广泛应用。绳驱并联机器人是将传统并联机器人的刚性连杆用柔性材料替代。相比传统并联机器人工作空间小等不足之处,绳索机器人兼具并联机器人负载能力强、运动速度快以及柔性材料惯性小、机构易重组,成本低等优点,已被国内外研究人员广泛应用于天文学、航空航天、物流、医学康复、运动模拟等工业和技术领域。
3、目前绳牵引并联机器人存在一定的控制误差,并且在移动时容易产生较大的抖动。有鉴于此,申请人在研究了现有的技术后特提出本申请。
技术实现思路
1、本发明提供了一种绳牵引并联机器人的控制方法、装置、设备和介质,以改善上述技术问题中的至少一个。
2、第一方面
3、本发明实施例提供了一种绳牵引并联机器人的控制方法,其包含:
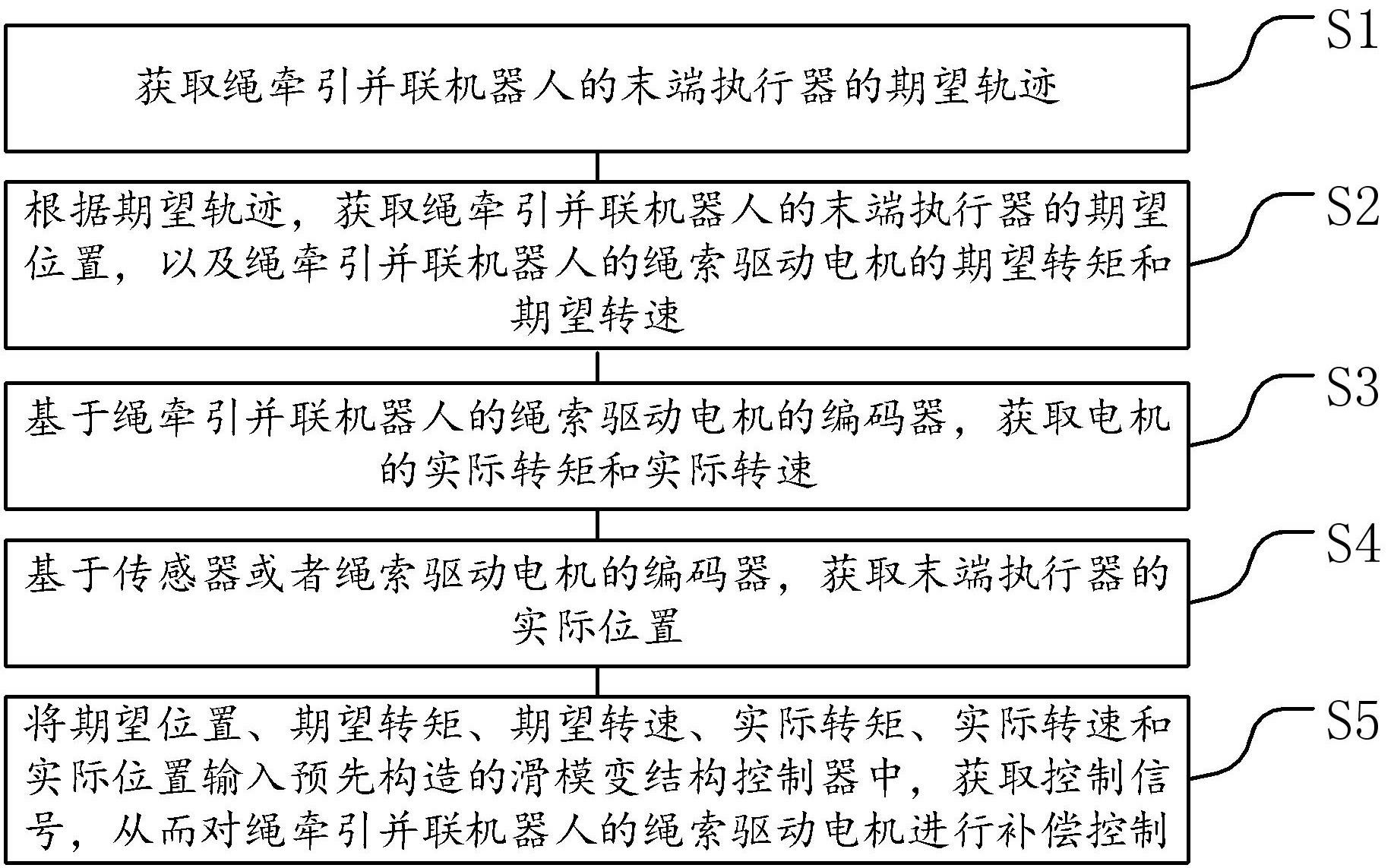
4、s1、获取绳牵引并联机器人的末端执行器的期望轨迹。其中,期望轨迹为以时间为自变量的轨迹函数。
5、s2、根据期望轨迹,获取绳牵引并联机器人的末端执行器的期望位置,以及绳牵引并联机器人的绳索驱动电机的期望转矩和期望转速。
6、s3、基于绳牵引并联机器人的绳索驱动电机的编码器,获取电机的实际转矩和实际转速。
7、s4、基于传感器或者绳索驱动电机的编码器,获取末端执行器的实际位置。
8、s5、将期望位置、期望转矩、期望转速、实际转矩、实际转速和实际位置输入预先构造的滑模变结构控制器中,获取控制信号,从而对绳牵引并联机器人的绳索驱动电机进行补偿控制。其中,滑模变结构控制器如下:
9、
10、
11、
12、
13、式中,为滑模变结构控制器的控制律、为名义模型控制项、为比例积分项、为补偿非线性动态模型误差和外部扰动的鲁棒项、为系统的惯量矩阵、为末端执行器的坐标、为末端执行器的速度、为参考速度矢量、为参考加速度矢量、为系统的哥氏力矩阵、为公式简化符号、为绞盘半径、为重力矢量、为比例增益矩阵、为基于滑膜函数的位置误差量、为积分增益矩阵、为时间、为鲁棒增益系数矩阵、为饱和函数。
14、第二方面
15、本发明实施例提供了一种绳牵引并联机器人的控制装置,其包含:
16、期望轨迹获取模块,用于获取绳牵引并联机器人的末端执行器的期望轨迹。其中,期望轨迹为以时间为自变量的轨迹函数。
17、期望值计算模块,用于根据期望轨迹,获取绳牵引并联机器人的末端执行器的期望位置,以及绳牵引并联机器人的绳索驱动电机的期望转矩和期望转速。
18、第一实际参数获取模块,用于基于绳牵引并联机器人的绳索驱动电机的编码器,获取电机的实际转矩和实际转速。
19、第二实际参数获取模块,用于基于传感器或者绳索驱动电机的编码器,获取末端执行器的实际位置。
20、补偿控制模块,用于将期望位置、期望转矩、期望转速、实际转矩、实际转速和实际位置输入预先构造的滑模变结构控制器中,获取控制信号,从而对绳牵引并联机器人的绳索驱动电机进行补偿控制。其中,滑模变结构控制器如下:
21、
22、
23、
24、
25、式中,为滑模变结构控制器的控制律、为名义模型控制项、为比例积分项、为补偿非线性动态模型误差和外部扰动的鲁棒项、为系统的惯量矩阵、为末端执行器的坐标、为末端执行器的速度、为参考速度矢量、为参考加速度矢量、为系统的哥氏力矩阵、为公式简化符号、为绞盘半径、为重力矢量、为比例增益矩阵、为基于滑膜函数的位置误差量、为积分增益矩阵、为时间、为鲁棒增益系数矩阵、为饱和函数。
26、第三方面
27、本发明实施例提供了一种绳牵引并联机器人的控制设备,其包括处理器、存储器,以及存储在存储器内的计算机程序。计算机程序能够被处理器执行,以实现如第一方面任意一段的绳牵引并联机器人的控制方法。
28、第四方面
29、本发明实施例提供了一种计算机可读存储介质,计算机可读存储介质包括存储的计算机程序,其中,在计算机程序运行时控制计算机可读存储介质所在设备执行如第一方面任意一段的绳牵引并联机器人的控制方法。
30、通过采用上述技术方案,本发明可以取得以下技术效果:
31、本发明的绳牵引并联机器人的控制方法结合从编码器得来的电机转矩和转速信息,考虑到了绳索的拉力、非线性摩擦力以及外部时变扰动等因素,结合改善过抖振效果的滑模控制算法,形成全闭环位置控制回路,可以有效地克服外界扰动,解决系统建模误差问题,从而达到提高绳索机器人的控制精度。
技术特征:
1.一种绳牵引并联机器人的控制方法,其特征在于,包含:
2.根据权利要求1所述的一种绳牵引并联机器人的控制方法,其特征在于,根据所述期望轨迹,获取绳牵引并联机器人的末端执行器的期望位置,以及绳牵引并联机器人的绳索驱动电机的期望转矩和期望转速,具体包括:
3.根据权利要求1所述的一种绳牵引并联机器人的控制方法,其特征在于,所述饱和函数为: ,式中,为等速趋近律常用的符号函数、为基于滑膜函数的位置误差量、为常数值。
4.根据权利要求3所述的一种绳牵引并联机器人的控制方法,其特征在于,所述基于滑膜函数的位置误差量的计算模型为:
5.根据权利要求1至4任意一项所述的一种绳牵引并联机器人的控制方法,其特征在于,所述滑模变结构控制器基于考虑了绳索的拉力、非线性摩擦力以及外部时变扰动因数的绳牵引并联机器人运动模型构建;其中,绳牵引并联机器人运动模型为:
6.一种绳牵引并联机器人的控制装置,其特征在于,包含:
7.一种绳牵引并联机器人的控制设备,其特征在于,包括处理器、存储器,以及存储在所述存储器内的计算机程序;所述计算机程序能够被所述处理器执行,以实现如权利要求1至5任意一项所述的绳牵引并联机器人的控制方法。
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如权利要求1至5任意一项所述的绳牵引并联机器人的控制方法。
技术总结
本发明提供一种绳牵引并联机器人的控制方法、装置、设备和介质,涉及绳牵引并联机器人控制技术领域。控制方法包含:S1、获取绳牵引并联机器人的末端执行器的期望轨迹。S2、根据期望轨迹,获取绳牵引并联机器人的末端执行器的期望位置,以及绳牵引并联机器人的绳索驱动电机的期望转矩和期望转速。S3、基于绳牵引并联机器人的绳索驱动电机的编码器,获取电机的实际转矩和实际转速。S4、基于传感器或者绳索驱动电机的编码器,获取末端执行器的实际位置。S5、将期望位置、期望转矩、期望转速、实际转矩、实际转速和实际位置输入预先构造的滑模变结构控制器中,获取控制信号,从而对绳牵引并联机器人的绳索驱动电机进行补偿控制。
技术研发人员:彭怡红,李钟慎,林添良,李芊芊,谭智波,黄琪琛,李玉坤,缪骋
受保护的技术使用者:华侨大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!