一种核辐射环境下的金属管道修复机器人的制作方法
本发明属于金属管道修复机器人,尤其涉及一种核辐射环境下的金属管道修复机器人。
背景技术:
1、在核电领域反应堆控制区,供水系统有着十分重要的作用,保障供水系统正常运作十分关键。控制区供水系统的供水管有的是预埋在地下,随着使用年限增加,可能会出现局部开裂和渗漏的情况,形成安全隐患,现有的核辐射环境下的金属管道修复机器人,由车体头部、车体尾部、旋转车身、注胶机构、涂胶机构和涂胶头收放机构组成,其中车体头部、车体尾部同轴安装在机器人两端,在辐射环境中的管道内起支撑行走和牵引连接作用,这类设备对管道焊接时需要频繁调整机器人的位置,从而对焊枪的位置与朝向进行调整,这样容易造成虚焊,同时导致焊接效率较低,并且外壳与支撑轮之间间隙较小,翻越能力较差。
技术实现思路
1、针对上述技术问题,本发明提供一种核辐射环境下的金属管道修复机器人,利用旋转机构和安装座端部的机械臂,使焊接可以更加灵活地调整位置,不需要调整机器人整体的位置,同时增加移动轮与机器人外壳之间的间隙,提高该机器人的翻越能力。
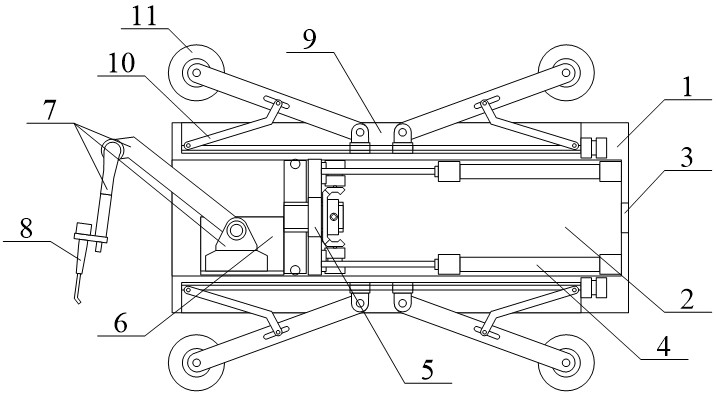
2、其技术方案是这样的:一种核辐射环境下的金属管道修复机器人,包括矩形机器人外壳,所述的矩形机器人外壳的内部左侧开设有安装凹孔,矩形机器人外壳的内部右侧开设有送料通孔,矩形机器人外壳内部右侧的四角位置分别螺栓固定有电动推杆,其特征在于,所述的矩形机器人外壳的内部左侧分别安装有水平移动旋转驱动器和机械臂旋转收纳器,机械臂旋转收纳器的内部左侧设置有微型焊接机械臂,微型焊接机械臂的端部螺栓固定有机械臂焊接终端,矩形机器人外壳的外侧四角位置分别开设有安装凹槽,矩形机器人外壳的外侧四角位置分别安装有同步调节驱动器,同步调节驱动器的左右两侧分别安装有可调节移动支撑腿。
3、优选的,所述的水平移动旋转驱动器包括滑动安装盘,所述的滑动安装盘的内侧中心位置嵌入有固定轴承,滑动安装盘的右侧中间位置设置有中心锥齿轮,中心锥齿轮的内部右侧焊接有安装套管,中心锥齿轮的右侧上下两部分别设置有驱动锥齿轮和转向电机。
4、优选的,所述的机械臂旋转收纳器包括盘型侧板,所述的盘型侧板的外侧开设有限位卡槽,限位卡槽的内侧放置有金属滚珠,盘型侧板的右侧中心位置一体化设置有穿线空心套管,盘型侧板的左侧下部焊接有弧形支撑板。
5、优选的,所述的同步调节驱动器包括复式螺纹杆,所述的复式螺纹杆的右侧设置有调节伺服电机,复式螺纹杆的外部左右两侧分别螺纹连接有螺纹孔滑动座,螺纹孔滑动座的上部前后两端分别焊接有安装耳板,复式螺纹杆的左侧前后两端以及复式螺纹杆的右侧前后两端分别设置有联动辅助支架。
6、优选的,所述的可调节移动支撑腿包括腿部支撑板,所述的腿部支撑板的内部左右两侧分别焊接有加固横板,腿部支撑板的内部左侧轴接有橡胶驱动轮,橡胶驱动轮的内侧后端焊接有移动配合齿轮,加固横板的内侧轴接有传动轴杆,传动轴杆的左端键连接有主动锥齿轮,加固横板的右侧螺栓固定有移动伺服电机。
7、优选的,所述的滑动安装盘插接在安装凹孔的内部左侧,并且电动推杆的输出杆与滑动安装盘的右侧四角位置螺栓连接。
8、优选的,所述的驱动锥齿轮和中心锥齿轮的外侧相互啮合,并且驱动锥齿轮键连接在转向电机的输出轴上。
9、优选的,所述的穿线空心套管的右侧贯穿滑动安装盘的内侧,并且穿线空心套管与固定轴承的内圈过盈连接。
10、优选的,所述的安装套管套接在穿线空心套管的外部右侧,并且安装套管和穿线空心套管的连接处螺栓连接。
11、与现有技术相比,本发明的有益效果为:
12、本发明中,所述的滑动安装盘、固定轴承、中心锥齿轮、安装套管、驱动锥齿轮和转向电机的设置,有利于配合微型焊接机械臂,对机械臂焊接终端端部的朝向以及位置进行更加灵活的调整,同时提高焊接效率。
13、本发明中,所述的盘型侧板、限位卡槽、金属滚珠、穿线空心套管和弧形支撑板的设置,有利于带动微型焊接机械臂转动,从而调整机械臂焊接终端端部的朝向,提高该机器人焊接时的灵活性。
14、本发明中,所述的复式螺纹杆、调节伺服电机、螺纹孔滑动座和安装耳板的设置,有利于与可调节移动支撑腿相互配合,调整可调节移动支撑腿端部的位置,可以对直径相差较大的管道进行使用,增加适用场合。
15、本发明中,所述的联动辅助支架、螺纹安装孔和旋转销轴杆的设置,有利于对可调节移动支撑腿进行限制,配合同步调节驱动器,增加橡胶驱动轮与矩形机器人外壳之间的最大间距,提高该机器人的翻越能力,防止该机器人在移动过程中出现卡接搁浅。
16、本发明中,所述的腿部支撑板、加固横板、橡胶驱动轮、移动配合齿轮、传动轴杆、主动锥齿轮和移动伺服电机的设置,有利于带动该机器人在管道的内侧进行移动,并且每个橡胶驱动轮配有单独的驱动电机,单个损坏后不影响该设备的移动。
技术特征:
1.一种核辐射环境下的金属管道修复机器人,其特征在于,该核辐射环境下的金属管道修复机器人,包括矩形机器人外壳(1),所述的矩形机器人外壳(1)的内部左侧开设有安装凹孔(2),矩形机器人外壳(1)的内部右侧开设有送料通孔(3),矩形机器人外壳(1)内部右侧的四角位置分别螺栓固定有电动推杆(4),其特征在于,所述的矩形机器人外壳(1)的内部左侧分别安装有水平移动旋转驱动器(5)和机械臂旋转收纳器(6),机械臂旋转收纳器(6)的内部左侧设置有微型焊接机械臂(7),微型焊接机械臂(7)的端部螺栓固定有机械臂焊接终端(8),矩形机器人外壳(1)的外侧四角位置分别开设有安装凹槽(9),矩形机器人外壳(1)的外侧四角位置分别安装有同步调节驱动器(10),同步调节驱动器(10)的左右两侧分别安装有可调节移动支撑腿(11);所述的水平移动旋转驱动器(5)包括滑动安装盘(51),所述的滑动安装盘(51)的内侧中心位置嵌入有固定轴承(52),滑动安装盘(51)的右侧中间位置设置有中心锥齿轮(53),中心锥齿轮(53)的内部右侧焊接有安装套管(54),中心锥齿轮(53)的右侧上下两部分别设置有驱动锥齿轮(55)和转向电机(56)。
2.如权利要求1所述的核辐射环境下的金属管道修复机器人,其特征在于,所述的机械臂旋转收纳器(6)包括盘型侧板(61),所述的盘型侧板(61)的外侧开设有限位卡槽(62),限位卡槽(62)的内侧放置有金属滚珠(63),盘型侧板(61)的右侧中心位置一体化设置有穿线空心套管(64),盘型侧板(61)的左侧下部焊接有弧形支撑板(65)。
3.如权利要求1所述的核辐射环境下的金属管道修复机器人,其特征在于,所述的同步调节驱动器(10)包括复式螺纹杆(101),所述的复式螺纹杆(101)的右侧设置有调节伺服电机(102),复式螺纹杆(101)的外部左右两侧分别螺纹连接有螺纹孔滑动座(103),螺纹孔滑动座(103)的上部前后两端分别焊接有安装耳板(104),复式螺纹杆(101)的左侧前后两端以及复式螺纹杆(101)的右侧前后两端分别设置有联动辅助支架(105)。
4.如权利要求1所述的核辐射环境下的金属管道修复机器人,其特征在于,所述的可调节移动支撑腿(11)包括腿部支撑板(111),所述的腿部支撑板(111)的内部左右两侧分别焊接有加固横板(112),腿部支撑板(111)的内部左侧轴接有橡胶驱动轮(113),橡胶驱动轮(113)的内侧后端焊接有移动配合齿轮(114),加固横板(112)的内侧轴接有传动轴杆(115),传动轴杆(115)的左端键连接有主动锥齿轮(116),加固横板(112)的右侧螺栓固定有移动伺服电机(117)。
5.如权利要求1所述的核辐射环境下的金属管道修复机器人,其特征在于,所述的滑动安装盘(51)插接在安装凹孔(2)的内部左侧,并且电动推杆(4)的输出杆与滑动安装盘(51)的右侧四角位置螺栓连接。
6.如权利要求1所述的核辐射环境下的金属管道修复机器人,其特征在于,所述的驱动锥齿轮(55)和中心锥齿轮(53)的外侧相互啮合,并且驱动锥齿轮(55)键连接在转向电机(56)的输出轴上。
7.如权利要求2所述的核辐射环境下的金属管道修复机器人,其特征在于,所述的穿线空心套管(64)的右侧贯穿滑动安装盘(51)的内侧,并且穿线空心套管(64)与固定轴承(52)的内圈过盈连接。
8.如权利要求2所述的核辐射环境下的金属管道修复机器人,其特征在于,所述的安装套管(54)套接在穿线空心套管(64)的外部右侧,并且安装套管(54)和穿线空心套管(64)的连接处螺栓连接。
技术总结
本发明提供一种核辐射环境下的金属管道修复机器人,包括矩形机器人外壳,所述的矩形机器人外壳的内部左侧开设有安装凹孔,矩形机器人外壳的内部右侧开设有送料通孔,矩形机器人外壳内部右侧的四角位置分别螺栓固定有电动推杆,其特征在于,所述的矩形机器人外壳的内部左侧分别安装有水平移动旋转驱动器和机械臂旋转收纳器,机械臂旋转收纳器的内部左侧设置有微型焊接机械臂,微型焊接机械臂的端部螺栓固定有机械臂焊接终端。本发明的有益效果为:通过滑动安装盘、固定轴承、中心锥齿轮、安装套管、驱动锥齿轮和转向电机的设置,有利于配合微型焊接机械臂,对机械臂焊接终端端部的朝向以及位置进行更加灵活的调整,同时提高焊接效率。
技术研发人员:于现臣,乔冕,王治海
受保护的技术使用者:山东省核与辐射安全监测中心
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!