多关节全致动尺寸可调的下肢外骨骼装置的制作方法
本发明涉及外骨骼装置,具体地,涉及一种多关节全致动尺寸可调的下肢外骨骼装置。
背景技术:
1、机械外骨骼是一种由钢铁的框架构成,并且可让人穿戴的机器人装置。目前,外骨骼装置作为人类助行的装置,越来越被各领域重视,特别是军事、户外运动和医疗康复领域。
2、现有公开号为cn114872018a的中国专利申请文献,其公开了一种具有防摔功能的简易便携式下肢外骨骼助力装置,包括背带单元,腰带单元,下肢支撑单元,动力输出单元,信号接收输出单元及主控制单元,所述腰带单元内侧还设置有防摔单元;整个下肢外骨骼助力装置简化了助力装置的结构,提高下肢外骨骼助力装置的智能化水平。
3、现有技术中的下肢外骨骼装置难以实现多关节的尺寸调节,进而难以适用不同体型的使用者,适用性差,存在待改进之处。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种多关节全致动尺寸可调的下肢外骨骼装置。
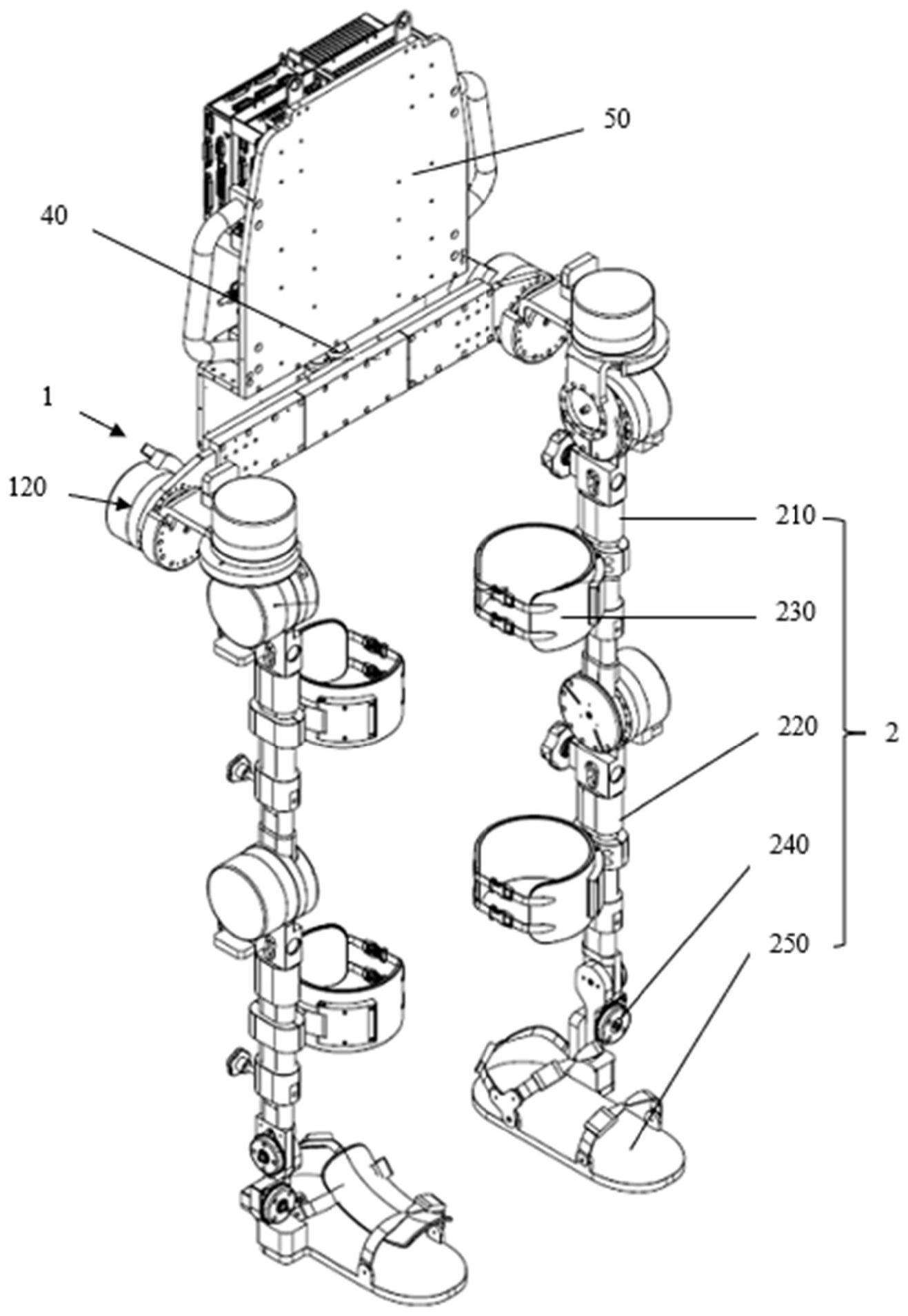
2、根据本发明提供的一种多关节全致动尺寸可调的下肢外骨骼装置,包括腰部结构和腿部结构,所述腿部结构在腰部结构的两侧分别设置有一组;所述腰部结构包括:对心调整组件:调节两个腿部结构的相对位置;髋关节组件:连接腿部结构,带动腿部结构做屈伸、外展内收、内旋外旋中的一种或多种;所述腿部结构包括:大腿组件:包括第一长度调节组件;小腿组件:包括第二长度调节组件;脚踝组件:上端与小腿组件转动连接,下端与足部组件转动连接;足部组件:与脚踝组件转动连接。
3、优选地,所述腰部结构包括:基板、限位调整板以及髋关节安装板,所述髋关节安装板通过限位调整板在基板的两端分别安装有一个,且任一髋关节安装板均沿基板长度方向与基板滑移配合;所述对心调整组件包括:齿轮、第一齿条以及第二齿条,所述第一齿条和第二齿条的长度方向均平行于基板的长度方向,所述齿轮转动安装在基板上,所述第一齿条和第二齿条二者分别滑动设置在齿轮的上下两侧,所述第一齿条和第二齿条二者均与齿轮啮合,且所述第一齿条和其一髋关节安装板连接,所述第二齿条和另一髋关节安装板连接。
4、优选地,所述髋关节安装板上设置有限位销,所述基板或限位调整板上设置有限位槽,所述限位槽容纳限位销并允许限位销沿基板长度方向运动。
5、优选地,所述髋关节组件包括:第一驱动电机、第二电机安装座、第二驱动电机、电机输出异形法兰以及第三驱动电机;所述第一驱动电机的输出轴与第二电机安装座传动连接,所述第二驱动电机安装在第二电机安装座上,所述第二驱动电机的输出轴与电机输出异形法兰传动连接,所述第三驱动电机安装在电机输出异形法兰上,所述第三驱动电机的输出轴与大腿组件的上端传动连接;且所述第一驱动电机的输出轴的轴向、第二驱动电机输出轴的轴向以及第三驱动电机输出轴的轴向三者相互垂直。
6、优选地,所述大腿组件还包括第三安装座,第一长度调节组件包括:第一外侧扁圆型材、第一内侧扁圆型材、第一丝杆以及第二型材连接件;所述第一外侧扁圆型材的上端与第三安装座紧固连接,所述第一内侧扁圆型材自下向上穿入第一外侧扁圆型材内并与其滑移配合,所述第一丝杆设置在第一内侧扁圆型材和第二内侧扁圆型材的内部;所述第一丝杆的上端转动安装在第三安装座内,所述第一内侧扁圆型材通过第二型材连接件与第一丝杆螺纹连接。
7、优选地,所述第一内侧扁圆型材的外表面设置有刻度尺。
8、优选地,所述第一丝杆的顶端同轴安装有第一锥形齿轮;所述第三安装座上设置有第一调节件,所述第一调节件包括第二锥形齿轮和旋钮把手,所述第二锥形齿轮与第一锥形齿轮啮合,所述旋钮把手的一端与第二锥形齿轮同轴连接,所述第二旋钮把手的另一端伸出第三安装座并与第三安装座转动配合。
9、优选地,所述脚踝组件包括型材连接件、足底连接件、连接板、第一阻尼传动轴、第二阻尼传动轴以及阻尼器;所述型材连接件的上端与小腿组件的下端连接,所述第二阻尼传动轴依次穿设阻尼器、型材连接件以及连接板并将三者转动连接;所述足底连接件的下端与足部组件连接,所述第一阻尼传动轴依次穿设阻尼器、连接板以及足底连接件并将三者转动连接。
10、优选地,还包括监控反馈系统,所述监控反馈系统包括编码器,所述腰部结构和腿部结构的任一电机上均安装有编码器监控反馈组件的位置状态。
11、优选地,还包括背包组件,所述背包组件包括电池和工控机,所述电池为下肢外骨骼装置提供电源,所述工控机获取监控反馈系统采集的位置状态信息并向对应的电机发出控制信息。
12、与现有技术相比,本发明具有如下的有益效果:
13、1、本发明通过对心调整组件调整两个髋关节的相对位置、第一长度调节组件调节大腿的长度,第二长度调节组件调节小腿的长度,实现了下肢外骨骼装置的多关节全致动尺寸可调,可以根据用户体型进行调节,有助于提高下肢外骨骼装置整体的适用性。
14、2、本发明通过在髋关节、膝关节位置均安装有驱动电机及绝对值编码器,绑带位置安装有六维力传感器,足底位置安装有足底力传感器,通过检测穿戴人的关节位置、速度、力矩相关参数,利用控制反馈闭环,更好的适应人体动作,进一步增强人机交互效能。
技术特征:
1.一种多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,包括腰部结构和腿部结构,所述腿部结构在腰部结构的两侧分别设置有一组;
2.如权利要求1所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,所述腰部结构包括:基板、限位调整板以及髋关节安装板,所述髋关节安装板通过限位调整板在基板的两端分别安装有一个,且任一髋关节安装板均沿基板长度方向与基板滑移配合;
3.如权利要求2所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,所述髋关节安装板上设置有限位销,所述基板或限位调整板上设置有限位槽,所述限位槽容纳限位销并允许限位销沿基板长度方向运动。
4.如权利要求1所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,所述髋关节组件包括:第一驱动电机、第二电机安装座、第二驱动电机、电机输出异形法兰以及第三驱动电机;
5.如权利要求1所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,所述大腿组件还包括第三安装座,第一长度调节组件包括:第一外侧扁圆型材、第一内侧扁圆型材、第一丝杆以及第二型材连接件;
6.如权利要求5所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,所述第一内侧扁圆型材的外表面设置有刻度尺。
7.如权利要求5所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,所述第一丝杆的顶端同轴安装有第一锥形齿轮;
8.如权利要求1所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,所述脚踝组件包括型材连接件、足底连接件、连接板、第一阻尼传动轴、第二阻尼传动轴以及阻尼器;
9.如权利要求1所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,还包括监控反馈系统,所述监控反馈系统包括编码器,所述腰部结构和腿部结构的任一电机上均安装有编码器监控反馈组件的位置状态。
10.如权利要求9所述的多关节全致动尺寸可调的下肢外骨骼装置,其特征在于,还包括背包组件,所述背包组件包括电池和工控机,所述电池为下肢外骨骼装置提供电源,所述工控机获取监控反馈系统采集的位置状态信息并向对应的电机发出控制信息。
技术总结
本发明提供了一种多关节全致动尺寸可调的下肢外骨骼装置,包括腰部结构和腿部结构,腿部结构在腰部结构的两侧分别设置有一组;腰部结构包括:对心调整组件:调节两个腿部结构的相对位置;髋关节组件:连接腿部结构,带动腿部结构做屈伸、外展内收、内旋外旋中的一种或多种;腿部结构包括:大腿组件:包括第一长度调节组件;小腿组件:包括第二长度调节组件;脚踝组件:上端与小腿组件转动连接,下端与足部组件转动连接;足部组件:与脚踝组件转动连接。实现了下肢外骨骼装置的多关节全致动尺寸可调,可以根据用户体型进行调节,有助于提高下肢外骨骼装置整体的适用性。通过监控反馈系统能够更好的适应人体动作,增强人机交互效能。
技术研发人员:李智军,李国欣,黄鹏博,夏海生
受保护的技术使用者:合肥综合性国家科学中心人工智能研究院(安徽省人工智能实验室)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!