一种机器人智能化喷涂示教系统及其控制方法与流程
本发明涉及喷涂机器人,特别是涉及一种机器人喷涂智能示教系统及其控制方法。
背景技术:
1、近年来,由于喷涂工作环境恶劣且对人体有着严重的伤害作用,企业很难招到员工进行喷涂作业,因此企业对喷涂机器人替代人工喷涂的需求越发迫切。同时,喷涂机器人由于其优良的重复精度、喷涂一致性好和涂料利用率高等优点,越来越多的企业采购并使用喷涂机器人。但是,影响喷涂机器人大范围使用的主要难题是喷涂机器人编程操作困难,对操作人员要求高。因此,简化喷涂机器人程序编程流程和难度,已经成为中小厂家最急迫的需求。
2、喷涂机器人示教器编程是应用最为广泛的一种方式,通常由操作人员在作业现场操作示教器控制机器人运动到达位置点并记录,通过设置喷涂作业中大量的关键路径点的姿态、设置喷涂开关信号,设置喷涂参数,完成示教编程,喷涂机器人示教编程需要操作者具备一定的机器人使用经验。虽然喷涂机器人都内置一些喷涂工艺包,简化了喷涂示教流程,但是只能应对喷涂表面较为规则的情况,在实际工作中,面对产品结构复杂、型号随时变换等的生产情况,喷涂工艺包的作用范围很有限。喷涂机器人示教器编程效率低下无法满足产品的频繁变化,因此制约了喷涂机器人的在中小厂家的推广应用。
3、喷涂机器人拖动示教编程,需要机器人操作者直接拖动机器人末端工具即喷枪预演一次喷涂作业,机器人控制器实时记录拖动过程中机器人的位姿信息和喷涂工艺参数。完成一件产品的喷涂拖动示教作业后,利用机器人控制器记录的拖动过程数据即可再现喷涂过程。拖动示教的预演示教过程喷涂效果所见即所得,可立即生成机器人控制程序,特别适用于产品频繁变换的中小型企业喷涂生产环境。但是拖动示教需要机器人控制器要么具备拖动示教功能,要么需要安装昂贵的6轴力传感器,这些在现有的大多数喷涂机器人应用现场并不具备。同时,在拖动操作大型的喷涂机器人时,由于机器人的空间约束以及质量较大,并不方便实际编程。这些都大大影响了喷涂机器人拖动示教编程的推广和应用。
4、喷涂机器人离线编程,需要机器人操作者将工件三维图纸、机器人模型和喷枪模型导入离线编程软件。在离线编程软件上设置喷涂参数后,选取需要喷涂的面,由软件规划路径并校验,生成喷涂作业程序。喷涂机器人离线编程需要工厂购买昂贵的离线编程软件,操作人员具备较高的技术水平,工件的三维模型等,可以实现高效能的编程,比较适用于人员素质较高的大型项目。在产品频繁变换的中小型企业喷涂生产环境中,工厂一般没有离线编程软件,且产品的三维模型也很难拿到手,导致离线编程在中小型工厂的喷涂作业实际环境中并不适用。
技术实现思路
1、针对上述技术问题,本发明提出了一种智能化喷涂示教系统及其控制方法,用于解决现有技术中不便于获取示教系统的喷涂程序的问题。
2、本发明所要解决的技术问题采用以下技术方案来实现:
3、一方面,本发明提供了一种机器人喷涂智能化示教系统,包括喷涂机器人和智能喷枪设备,其中所述智能喷枪设备包括喷涂示教控制器、喷枪和设置在所述喷枪上的第一定位追踪器;所述喷涂示教控制器用于:
4、获取所述智能喷枪设备的喷枪工具坐标系,以及获取基于红外定位系统的第一工件坐标系;
5、在示教作业过程中,根据所述第一定位追踪器获取所述喷枪的末端在所述喷枪工具坐标系中的第一运动轨迹,以及所述喷枪的开关数据;
6、将所述第一运动轨迹转化为所述第一工件坐标系下的第二运动轨迹,根据所述开关数据和所述第二运动轨迹得到预设喷涂程序,并将所述预设喷涂程序发送给所述喷涂机器人;
7、所述喷涂机器人根据所述预设喷涂程序进行喷涂示教。
8、根据本发明的一个实施例,所述的获取所述智能喷枪设备的喷枪工具坐标系,包括:
9、将所述喷枪的末端绕作业空间中的预设点进行多个角度的转动,并在转动过程中根据所述定位追踪器获取所述智能喷枪设备的位置信息;
10、根据所述位置信息计算所述喷枪的末端相对于所述定位追踪器的旋转矩阵,以得到所述喷枪工具坐标系。
11、根据本发明的一个实施例,所述示教系统还包括示教笔,所述获取基于红外定位系统的第一工件坐标系包括:
12、采用示教笔对多个预设点的坐标进行标定,以生成所述第一工件坐标系,其中多个所述预设点至少包括原点和各坐标轴的方向点。
13、根据本发明的一个实施例,所述示教笔包括笔身,所述笔身的一端设置有定位追踪器,所述笔身上设置有第一按钮面板。
14、根据本发明的一个实施例,所述的所述喷涂机器人根据所述预设喷涂程序进行喷涂示教,包括:
15、获取基于所述喷涂机器人基坐标系的第二工件坐标系,其中所述第二工件坐标系与所述第一工件坐标系相对应;
16、根据所述预设喷涂程序控制所述喷涂机器人的末端在所述第二工件坐标系中按照所述第二运动轨迹进行喷涂示教。
17、根据本发明的一个实施例,所述的获取基于所述喷涂机器人基坐标系的第二工件坐标系,包括:
18、采用所述喷涂机器人的末端对多个预设点的坐标进行标定,以生成所述第二工件坐标系。
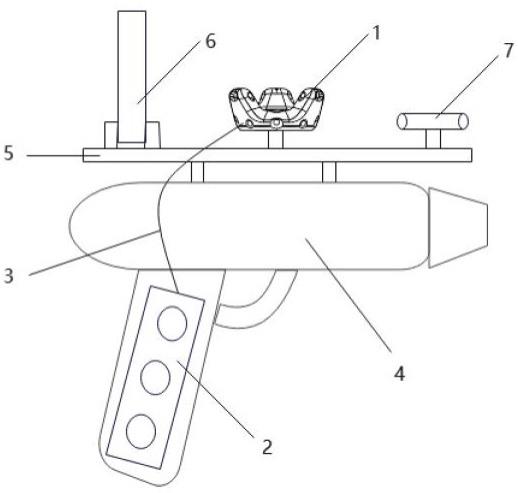
19、根据本发明的一个实施例,所述智能喷枪设备还包括支架,所述支架设置在所述喷枪上,所述喷涂示教控制器和/或所述定位追踪器设置在所述支架上。
20、根据本发明的一个实施例,所述定位追踪器连接有第二按钮面板,所述第二按钮面板固定在所述支架上。
21、根据本发明的一个实施例,所述支架上还设置有激光显示装置,所述激光显示装置用于显示所述喷枪的喷涂位置。
22、另一方面,本发明还提供了上述任一项实施例所述的喷涂智能化示教系统的控制方法,包括:
23、获取所述智能喷枪设备的喷枪工具坐标系,以及获取基于红外定位系统的第一工件坐标系;
24、在示教作业过程中,根据所述定位追踪器获取所述喷枪的末端在所述喷枪工具坐标系中的第一运动轨迹,以及所述喷枪的开关数据;
25、将所述第一运动轨迹转化为所述第一工件坐标系下的第二运动轨迹,根据所述开关数据和所述第二运动轨迹得到预设喷涂程序,并将所述预设喷涂程序发送给所述喷涂机器人;
26、所述喷涂机器人根据所述预设喷涂程序进行喷涂示教。
27、本发明所提供的技术方案,在示教作业过程中根据定位追踪器获取喷枪的末端在喷枪工具坐标系中的第一运动轨迹,以及喷枪的开关数据;然后将第一运动轨迹转化为第一工件坐标系下的第二运动轨迹,根据开关数据和第二运动轨迹得到预设喷涂程序,并将预设喷涂程序发送给喷涂机器人;喷涂机器人根据预设喷涂程序进行喷涂示教。由于本发明所提供的技术方案,只需要根据示教作业即可得到用于控制喷涂机器人的预设喷涂程序,不需要进行人工编程,因此可以解决现有技术中不便于获取示教系统的喷涂程序的问题,达到提高用户体验的目的。
28、下面结合附图对本发明的智能化喷涂示教编程系统及编程方法作进一步说明。
技术特征:
1.一种机器人喷涂智能化示教系统,其特征在于,包括喷涂机器人和智能喷枪设备,其中所述智能喷枪设备包括喷涂示教控制器、喷枪和设置在所述喷枪上的第一定位追踪器;所述喷涂示教控制器用于:
2.根据权利要求1所述的机器人喷涂智能化示教系统,其特征在于,
3.根据权利要求1所述的机器人喷涂智能化示教系统,其特征在于,
4.根据权利要求3所述的机器人喷涂智能化示教系统,其特征在于,
5.根据权利要求1所述的机器人喷涂智能化示教系统,其特征在于,
6.根据权利要求5所述的机器人喷涂智能化示教系统,其特征在于,
7.根据权利要求1所述的机器人喷涂智能化示教系统,其特征在于,
8.根据权利要求7所述的机器人喷涂智能化示教系统,其特征在于,
9.根据权利要求7所述的机器人喷涂智能化示教系统,其特征在于,
10.一种权利要求1-9任一项所述的机器人喷涂智能化示教系统的控制方法,其特征在于,包括:
技术总结
本发明针对喷涂机器人技术领域,具体为一种机器人喷涂智能示教系统及其控制方法,其中控制方法包括:获取智能喷枪设备的喷枪工具坐标系,以及获取基于红外定位系统的第一工件坐标系;在示教作业过程中,根据第一定位追踪器获取所述喷枪的末端在所述喷枪工具坐标系中的第一运动轨迹和喷枪的开关数据;将第一运动轨迹转化为所述第一工件坐标系下的第二运动轨迹,根据开关数据和第二运动轨迹得到预设喷涂程序,并将预设喷涂程序发送给喷涂机器人;喷涂机器人根据预设喷涂程序进行喷涂示教。本发明的技术方案能够解决现有技术中不便于获取示教系统的喷涂程序的问题。
技术研发人员:杨海峰,刘振宇,杨超,任剑云
受保护的技术使用者:北京炎凌嘉业机电设备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!