一种行走爬坡机构及高速挂轨机器人的制作方法
本发明涉及挂轨机器人,具体为一种行走爬坡机构及高速挂轨机器人。
背景技术:
1、随着科技的发展,机器人逐渐可以代替人类执行一些重复性高、强度大、具有一定危险的工作,尤其是在巡检监控方面,极大的提高了工作效率,轨道机器人是一种能够沿着高空轨道行进的机器人,其具有运行轨迹确定、不占用地面空间等优点,在空间受限和对安全性要求较高的场合有广泛的应用。
2、在机房、变电站或者隧道等地方,因为空间有限并且环境相对特殊,维护人员进入上述空间进行巡查或巡检时会产生诸多不便,此外,常规轮式或履带式的巡检机器人也受限于空间导致无法使用,所以悬挂于工作场景顶部的挂轨机器人应运而生。
3、请参阅公告号为cn216000499u的一种挂轨机器人的驱动机构及挂轨机器人,在该专利中提出“现有的挂轨机器人依靠驱动轮的自身摩擦前进,在爬坡时依靠布设在轨道上的齿条和链轮啮合前进,这两种结构分别依靠各自的动力源驱动,使得挂轨机器人的成本、重量及能耗增加”,上述实施例中通过链轮和链条的啮合实现挂轨机器人的上下坡操作,然而此种方法受链条松紧程度的影响较大,在轨道较长的情况下链条容易松弛,容易导致链轮脱离链条,影响传动效果,实用性较差,本申请针对该问题提出另外一种技术方案来解决该技术问题。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种行走爬坡机构及高速挂轨机器人,具备可利用传动轮的转动使前后两侧横杆上的插杆交替插接等插板,从而实现对挂轨机器人的移动,且结构简单,具有良好的传动效果,挂轨机器人的移动稳定优点,解决了现有的挂轨机器人依靠驱动轮的自身摩擦前进,在爬坡时依靠布设在轨道上的齿条和链轮啮合前进,这两种结构分别依靠各自的动力源驱动,使得挂轨机器人的成本、重量及能耗增加的问题。
3、(二)技术方案
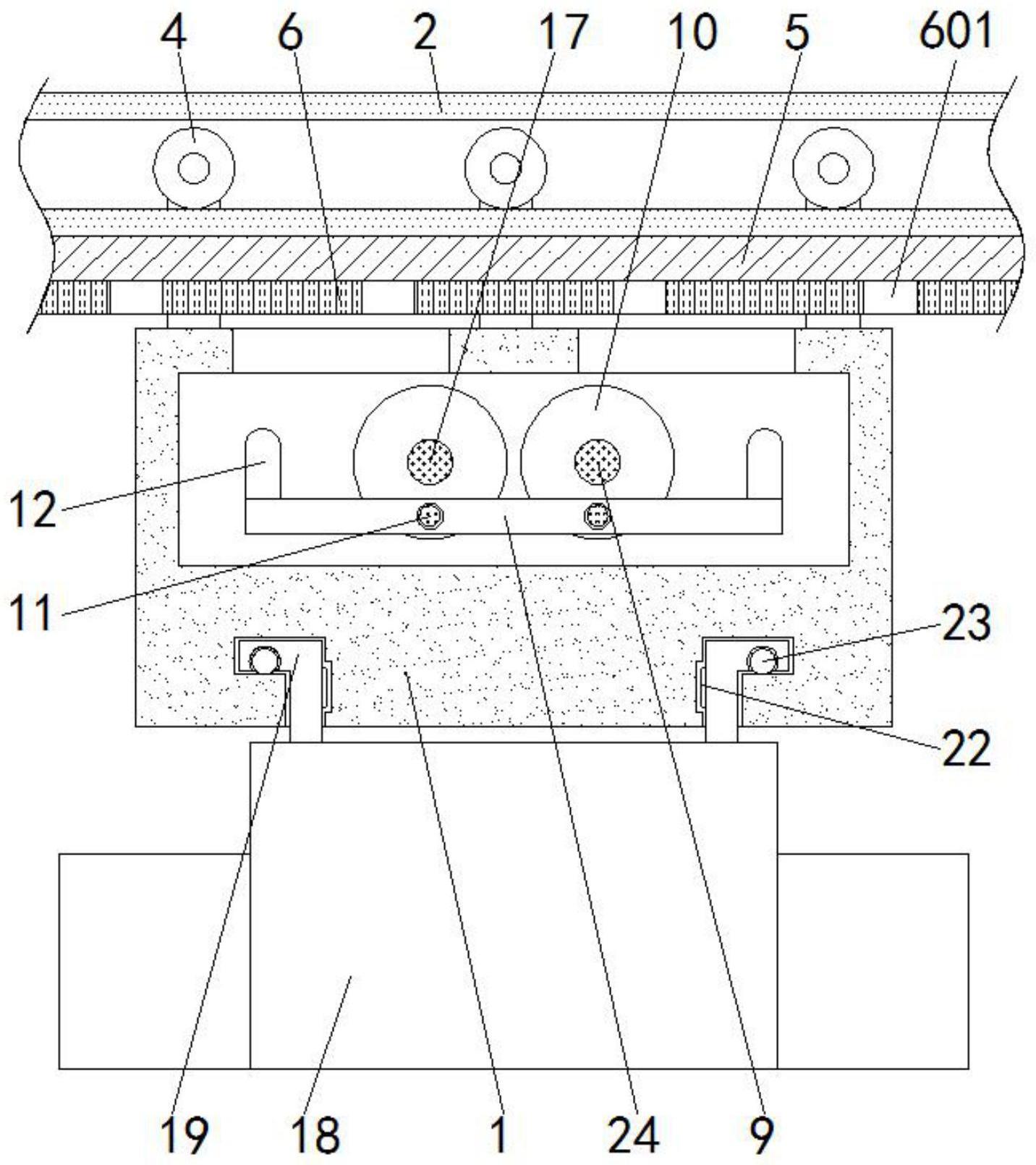
4、为实现上述使挂轨机器人移动稳固,减少能耗的目的,本发明提供如下技术方案:一种行走爬坡机构,包括基座和轨道,所述基座的顶部固定连接有数量为两个的固定架,两个所述固定架相对的一侧转动连接有延伸至轨道内的行走轮,所述轨道的底部设置有插板,所述基座的内部转动连接有第一转轴和第二转轴,所述基座的内部固定连接有驱动电机;
5、所述第一转轴和第二转轴的外侧均固定连接有数量为两个的传动轮,前后两侧所述传动轮相离的一侧转动连接有横杆,所述横杆的顶部固定连接有插杆。
6、优选的,所述固定架有立板和沿伸块组成,其中沿伸块与立板呈九十度,且沿伸块延伸至轨道内部,所述行走轮靠近固定架的一侧固定连接有转动轴,且转动轴外侧固定连接有与沿伸块固定连接的轴承一。
7、优选的,所述插板的顶部固定连接有数量为两个的连接块,且连接块与轨道底部固定连接,所述插板的内部开设有与横杆位置对应的插孔,且插孔分为交替排布的两组。
8、优选的,所述基座的内部固定连接有数量为两个的固定板,所述第一转轴和第二转轴的外侧均设置有与固定板固定连接的轴承二。
9、优选的,所述固定架的底部固定连接有稳固块,且稳固块为l形,所述稳固块的另一端设置有与轨道贴合的滑轮。
10、优选的,前后两侧所述传动轮相离的一侧固定连接有连接杆,且前后两侧传动轮上的连接杆中心对称,所述横杆的内部开设有与连接杆位置相对应的连接孔。
11、优选的,所述第一转轴和第二转轴的外侧均固定连接有从动链轮,所述驱动电机的输出端固定连接有与从动链轮位置相对应的驱动链轮,两个所述从动链轮和驱动链轮的外侧设置有链条。
12、本发明要解决的另外一个技术问题是一种高速挂轨机器人,包括基座底部设置的机器人本体,所述机器人本体的顶部固定连接有与基座转动连接的连接环,所述基座的内部固定连接有转动电机,所述转动电机的输出端固定连接有与连接环传动连接的传动齿轮。
13、优选的,所述连接环的截面形状为l形,所述连接环的内侧固定连接有与传动齿轮啮合的齿环。
14、优选的,所述基座的内部开设有与连接环滑动适配的环形滑槽,所述连接环的内部设置有与环形滑槽内底壁贴合的滚珠。
15、(三)有益效果
16、与现有技术相比,本发明提供了一种行走爬坡机构及高速挂轨机器人,具备以下有益效果:
17、1、该行走爬坡机构及高速挂轨机器人,通过设置的爬坡移位机构,可在驱动电机的作用下使第一转轴和第二转轴同步转动,从而在传动轮的作用下使前后两侧的横杆交替上下活动,当横杆向上活动时,插杆插入插板中的插孔,并随着传动轮的继续转动,使插杆借助对插板的反推力带动基座在轨道下方移动,且插杆与插板的连接稳固,能够有效减少打滑现象,实现基座及其下方机器人本体的稳固爬坡活动,且装置仅使用一个动力源,能够起到降低整个挂轨机器人的成本、重量及能耗的效果。
18、2、该行走爬坡机构及高速挂轨机器人,通过设置的巡检调整机构,当机器人本体在轨道上移位行走时,可利用转动电机的驱动作用使机器人本体转动,从而扩大其工作时的巡检范围,保持良好的巡检效果,有效提高机器人本体的实用性和灵活性。
技术特征:
1.一种行走爬坡机构,其特征在于,包括基座(1)和轨道(2),所述基座(1)顶部固定连接有数量为两个的固定架(3),两个所述固定架(3)相对的一侧转动连接有延伸至轨道(2)内的行走轮(4),所述轨道(2)的底部设置有插板(6),所述基座(1)的内部转动连接有第一转轴(9)和第二转轴(17),所述基座(1)的内部固定连接有驱动电机(13);
2.根据权利要求1所述的一种行走爬坡机构,其特征在于,所述固定架(3)有立板和沿伸块组成,其中沿伸块与立板呈九十度,且沿伸块延伸至轨道(2)内部,所述行走轮(4)靠近固定架(3)的一侧固定连接有转动轴,且转动轴外侧固定连接有与沿伸块固定连接的轴承一。
3.根据权利要求1所述的一种行走爬坡机构,其特征在于,所述插板(6)的顶部固定连接有数量为两个的连接块(5),且连接块(5)与轨道(2)底部固定连接,所述插板(6)的内部开设有与横杆(24)位置对应的插孔(601),且插孔(601)分为交替排布的两组。
4.根据权利要求1所述的一种行走爬坡机构,其特征在于,所述基座(1)的内部固定连接有数量为两个的固定板(8),所述第一转轴(9)和第二转轴(17)的外侧均设置有与固定板(8)固定连接的轴承二。
5.根据权利要求1所述的一种行走爬坡机构,其特征在于,所述固定架(3)的底部固定连接有稳固块(7),且稳固块(7)为l形,所述稳固块(7)的另一端设置有与轨道(2)贴合的滑轮。
6.根据权利要求1所述的一种行走爬坡机构,其特征在于,前后两侧所述传动轮(10)相离的一侧固定连接有连接杆(11),且前后两侧传动轮(10)上的连接杆(11)中心对称,所述横杆(24)的内部开设有与连接杆(11)位置相对应的连接孔。
7.根据权利要求1所述的一种行走爬坡机构,其特征在于,所述第一转轴(9)和第二转轴(17)的外侧均固定连接有从动链轮(16),所述驱动电机(13)的输出端固定连接有与从动链轮(16)位置相对应的驱动链轮(14),两个所述从动链轮(16)和驱动链轮(14)的外侧设置有链条(15)。
8.一种高速挂轨机器人,其特征在于,包括基座(1)底部设置的机器人本体(18),所述机器人本体(18)的顶部固定连接有与基座(1)转动连接的连接环(19),所述基座(1)的内部固定连接有转动电机(20),所述转动电机(20)的输出端固定连接有与连接环(19)传动连接的传动齿轮(21)。
9.根据权利要求8所述的一种高速挂轨机器人,其特征在于,所述连接环(19)的截面形状为l形,所述连接环(19)的内侧固定连接有与传动齿轮(21)啮合的齿环(22)。
10.根据权利要求8所述的一种高速挂轨机器人,其特征在于,所述基座(1)的内部开设有与连接环(19)滑动适配的环形滑槽,所述连接环(19)的内部设置有与环形滑槽内底壁贴合的滚珠(23)。
技术总结
本发明涉及挂轨机器人技术领域,且公开了一种行走爬坡机构及高速挂轨机器人,包括基座顶部固定连接且数量为两个的固定架,两个所述固定架相对的一侧转动连接有延伸至轨道内的行走轮,所述轨道的底部设置有插板,所述基座的内部转动连接有第一转轴和第二转轴,所述基座的内部固定连接有驱动电机,所述第一转轴和第二转轴的外侧均固定连接有数量为两个的传动轮,前后两侧所述传动轮相离的一侧转动连接有横杆。该一种行走爬坡机构及高速挂轨机器人,能够实现基座及其下方机器人本体的稳固爬坡活动,有效减少打滑现象,且机器人本体能够转动,可扩大巡检范围的效果,保持良好的巡检效果,并达到降低整个挂轨机器人的成本、重量及能耗的效果。
技术研发人员:杨威,沈相隆,张洋,龚国敏
受保护的技术使用者:捷迅技术(广州)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!