一种智能机器人安全环境感知器的制作方法
本发明属于智能机器人,特别是指一种智能机器人安全环境感知器。
背景技术:
1、随着现在人们生活质量的提高,更多的人在节假日等时间上会选择外出旅游等,因此,从旅游上也促进了其他各行各业的发展,如旅店、餐饮等等。
2、随着社会的科技发展,智能化设施的构建日益发展,特别是在机器人方面,很多家居、车间等地方均开始采用智能机器人进行工作,或者起到巡逻作用,如在旅店方面,大多数的旅店多为多楼层设计,通过走廊连接有多个住房,由于走廊、过道此类设计较为狭窄,且空间有限,极易发生火灾等情况,所以在旅店等地区对于走廊方面都会设置较多的监控设备对其进行监控,以防火灾等情况发生,但仅通过监控设备,面对小型火灾的发生需要人工快速赶到现场进行灭火操作,而员工从中控室赶往火灾发生地又存在着距离,很难及时赶到,而员工又无法时刻在每层走廊上来回巡逻,这样也只会徒增员工的劳动强度。为此,我们提出了一种智能机器人安全环境感知器。
技术实现思路
1、针对现有智能机器人安全环境感知器的不足,本发明提供了一种智能机器人安全环境感知器,具备对环境的各项数据进行实时监测,并对突然情况进行反馈及采取一定的措施的优点,解决了上述背景技术中提出的问题。
2、本发明的技术方案是这样实现的:
3、一种智能机器人安全环境感知器,包括底板,所述底板的一端安装有第一支撑板,第一支撑板垂直于底板,所述第一支撑板的侧面安装有第一高清摄像头,所述第一支撑板上和底板的侧面均安装有多个激光扫描仪,所述底板的底部靠近第一支撑板的一端设有移动驱动机构,且另一端设有转向机构;
4、所述底板的上方平行设有第二支撑板,第二支撑板的顶部垂直安装有柱形块,柱形块的内部同轴设有第一柱形腔体,第一柱形腔体的内部同轴设有第一驱动电机,第一驱动电机的底部同轴安装有支撑柱,支撑柱固定贯穿第二支撑板并通过转动轴承与底板相连接;
5、所述第二支撑板的上方两侧均设有弧形块,弧形块与柱形块同轴设置,且弧形块通过固定机构对称套接在柱形块上,所述弧形块上安装有温度传感器、甲醛传感器、湿度传感器和热流传感器,温度传感器、甲醛传感器、湿度传感器和热流传感器等间距排列在弧形块的侧壁上;
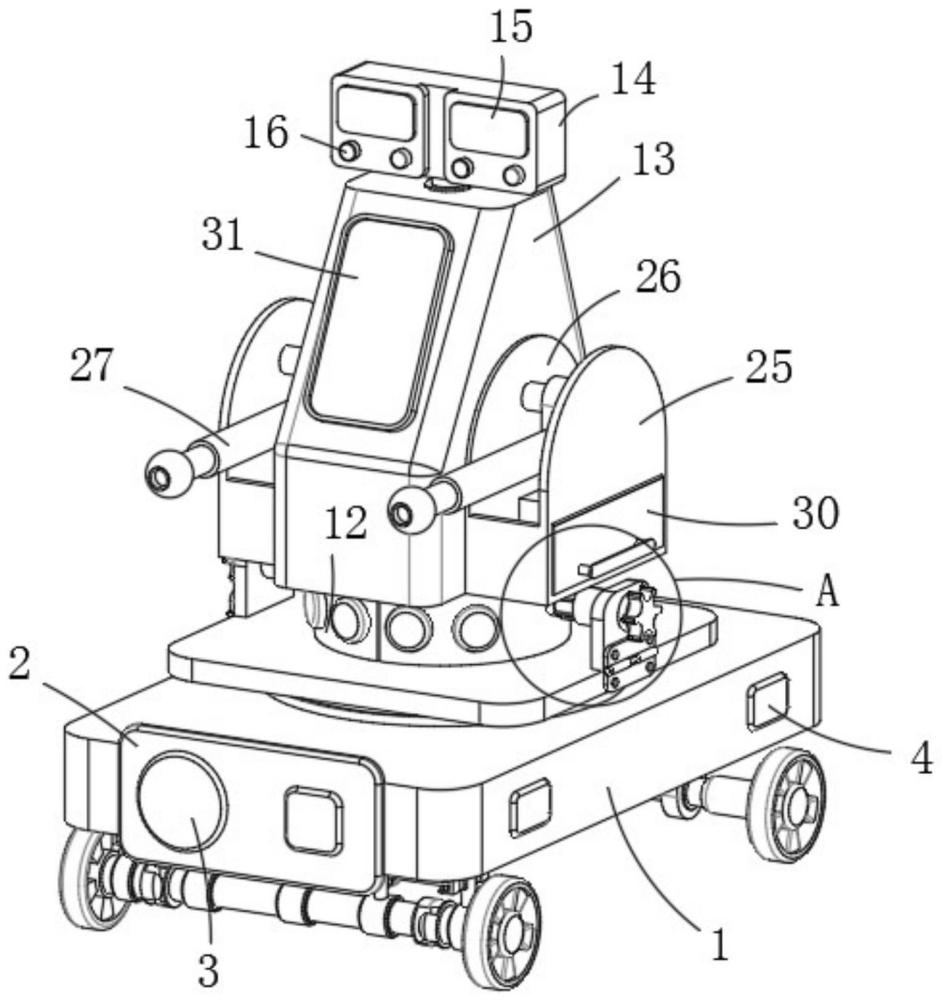
6、所述柱形块的顶部安装有机器人本体,所述机器人本体的上方垂直设有条形块,条形块靠近第一支撑板的一侧安装有第二高清摄像头和热成像摄像头,机器人本体的顶部设有第二柱形腔体,第二柱形腔体的内部同轴设有第二驱动电机,所述第二驱动电机的顶部与条形块固定连接,所述机器人本体靠近第一支撑板的一侧安装有显示屏。
7、可选的,所述机器人本体的两侧底部均安装有箱体,箱体的内部设有内腔,所述内腔的上端设有喷枪,喷枪靠近第一支撑板的一端安装有电磁阀,喷枪远离第一支撑板的一端通过转轴与内腔的内壁相连接,所述机器人本体的内部两侧均设有第三柱形腔体,第三柱形腔体内同轴设有第三驱动电机,第三驱动电机与喷枪上转轴同轴连接,所述内腔的底部安装有干粉盒,干粉盒通过压力泵与喷枪相连接,所述箱体上设有开合门,开合门与干粉盒相对应。
8、可选的,所述固定机构包括第一螺母,第一螺母共有两个,且对应固定在弧形块上,所述第二支撑板的上方两侧均垂直设有转动板,转动板的底部通过开合页与第二支撑板相连接,所述转动板上垂直安装有支撑管,支撑管与第一螺母同轴设置,所述支撑管靠近第一螺母的一端内容置有第二螺母,第二螺母与第一螺母同规格,所述支撑管的另一端容置有旋紧螺栓,旋紧螺栓与第二螺母螺纹连接;
9、每个所述第二螺母的外侧安装有多个等间距排列的限位块,限位块沿第二螺母的长度方向设置,所述支撑管的内壁上设有限位槽,限位槽与限位块一一对应。
10、可选的,所述移动驱动机构包括驱动轴,所述驱动轴的两端均同轴安装有驱动轮,所述驱动轴的两端均同轴转动轴承安装有第一固定板,第一固定板垂直固定在底板的底部,所述驱动轴上同轴安装有涡轮,涡轮的上方啮合连接有涡杆,涡杆的两端通过转动轴承安装有第二固定板,第二固定板垂直固定在底板的底部,所述涡杆靠近第一支撑板的一端同轴安装有第四驱动电机,第四驱动电机通过支架固定在底板的底部。
11、可选的,所述传动机构包括从动轴,从动轴的两端通过转动轴承连接有直杆,直杆与底板固定连接,从动轴的两端均同轴安装有万向节,万向节的另一端同轴安装有连接轴,连接轴的另一端同轴安装有从动轮,所述从动轴上通过转动轴承套接有第一套筒,第一套筒的顶部通过转动轴承安装有转动杆,转动杆垂直与从动轴,转动杆的顶部通过转动轴承与底板固定连接;
12、所述转动杆上安装有第一锥形齿轮,第一锥形齿轮远离第一支撑板的一侧啮合连接有第二锥形齿轮,第二锥形齿轮通过转轴同轴安装有第五驱动电机,且该转轴上通过转动轴承安装有第三固定板,第三固定板垂直固定在底板上,第五驱动电机通过支架与底板相连接,所述第一锥形齿轮的上方设有圆形齿轮,圆形齿轮同轴固定在转动杆上,所述圆形齿轮的两侧均安装有条形板,条形板平行于底板,且条形板靠近圆形齿轮的一侧通过齿条与圆形齿轮啮合连接,所述条形板远离圆形齿轮的一侧设有第一u型板,第一u型板通过连接板与底板固定连接,且条形板滑动安装在第一u型板内,所述条形板的两端均通过转轴转动安装在第二u型板内;
13、每个所述连接轴上均同轴转动轴承套接有第二套筒,第二套筒的顶部通过连接杆与底板固定连接,所述连接杆的两侧均设有条形腔体,所述条形腔体的内部容置有导向板,导向板的两端与第二u型板固定连接。
14、可选的,所述底板的顶部安装有环形槽,环形槽与柱形块同轴设置,所述环形槽内滑动安装有环形板,环形板与第二支撑板的底部固定连接。
15、与现有技术相比,本发明通过温度传感器、甲醛传感器、湿度传感器和热流传感器对行走路径上的各项环境数据进行实时监测,并对火警等突发灾害进行及时反馈至中控室内,以及对应的灭火措施,保证人们舒适的居住环境。
技术特征:
1.一种智能机器人安全环境感知器,包括底板(1),其特征在于,所述底板(1)的一端安装有第一支撑板(2),第一支撑板(2)垂直于底板(1),所述第一支撑板(2)的侧面安装有第一高清摄像头(3),所述第一支撑板(2)上和底板(1)的侧面均安装有多个激光扫描仪(4),所述底板(1)的底部靠近第一支撑板(2)的一端设有移动驱动机构,且另一端设有转向机构;
2.根据权利要求1所述的智能机器人安全环境感知器,其特征在于,所述机器人本体(13)的两侧底部均安装有箱体(25),箱体(25)的内部设有内腔(26),所述内腔(26)的上端设有喷枪(27),喷枪(27)靠近第一支撑板(2)的一端安装有电磁阀,喷枪(27)远离第一支撑板(2)的一端通过转轴与内腔(26)的内壁相连接,所述机器人本体(13)的内部两侧均设有第三柱形腔体(28),第三柱形腔体(28)内同轴设有第三驱动电机(29),第三驱动电机(29)与喷枪(27)上转轴同轴连接,所述内腔(26)的底部安装有干粉盒,干粉盒通过压力泵与喷枪(27)相连接,所述箱体(25)上设有开合门(30),开合门(30)与干粉盒相对应。
3.根据权利要求1所述的智能机器人安全环境感知器,其特征在于,所述固定机构包括第一螺母(19),第一螺母(19)共有两个,且对应固定在弧形块(12)上,所述第二支撑板(7)的上方两侧均垂直设有转动板(20),转动板(20)的底部通过开合页(21)与第二支撑板(7)相连接,所述转动板(20)上垂直安装有支撑管(22),支撑管(22)与第一螺母(19)同轴设置,所述支撑管(22)靠近第一螺母(19)的一端内容置有第二螺母(23),第二螺母(23)与第一螺母(19)同规格,所述支撑管(22)的另一端容置有旋紧螺栓(24),旋紧螺栓(24)与第二螺母(23)螺纹连接;
4.根据权利要求1所述的智能机器人安全环境感知器,其特征在于,所述移动驱动机构包括驱动轴(32),所述驱动轴(32)的两端均同轴安装有驱动轮(33),所述驱动轴(32)的两端均同轴转动轴承安装有第一固定板(34),第一固定板(34)垂直固定在底板(1)的底部,所述驱动轴(32)上同轴安装有涡轮(35),涡轮(35)的上方啮合连接有涡杆(36),涡杆(36)的两端通过转动轴承安装有第二固定板(37),第二固定板(37)垂直固定在底板(1)的底部,所述涡杆(36)靠近第一支撑板(2)的一端同轴安装有第四驱动电机(38),第四驱动电机(38)通过支架固定在底板(1)的底部。
5.根据权利要求1所述的智能机器人安全环境感知器,其特征在于,所述传动机构包括从动轴(39),从动轴(39)的两端通过转动轴承连接有直杆,直杆与底板(1)固定连接,从动轴(39)的两端均同轴安装有万向节(56),万向节(56)的另一端同轴安装有连接轴(55),连接轴(55)的另一端同轴安装有从动轮(57),所述从动轴(39)上通过转动轴承套接有第一套筒(40),第一套筒(40)的顶部通过转动轴承安装有转动杆(41),转动杆(41)垂直与从动轴(39),转动杆(41)的顶部通过转动轴承与底板(1)固定连接;
6.根据权利要求1所述的智能机器人安全环境感知器,其特征在于,所述底板(1)的顶部安装有环形槽(11),环形槽(11)与柱形块(5)同轴设置,所述环形槽(11)内滑动安装有环形板(10),环形板(10)与第二支撑板(7)的底部固定连接。
技术总结
本发明公开了一种智能机器人安全环境感知器,涉及智能机器人技术领域,具体包括底板,所述底板的一端安装有第一支撑板,第一支撑板垂直于底板,所述第一支撑板的侧面安装有第一高清摄像头,所述第一支撑板上和底板的侧面均安装有多个激光扫描仪,所述底板的底部靠近第一支撑板的一端设有移动驱动机构,且另一端设有转向机构;所述底板的上方平行设有第二支撑板,第二支撑板的顶部垂直安装有柱形块,柱形块的内部同轴设有第一柱形腔体。通过温度传感器、甲醛传感器、湿度传感器和热流传感器对行走路径上的各项环境数据进行实时监测,并对火警等突发灾害进行及时反馈至中控室内,以及对应的灭火措施,保证人们舒适的居住环境。
技术研发人员:陈志满,吴志诚,李燕霞,吴凌云
受保护的技术使用者:广东天太机器人有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!