一种用于机器人的升降旋转装置的制作方法
本发明属于机器人调节,特别是指一种用于机器人的升降旋转装置。
背景技术:
1、随着社会科技的进步,以及科技在现实生活中的广泛运用,对于机器人的研究日益成熟,现如今在人们日常生活,生产等方面机器人随处可见,很多实际的人工操作方面开始渐渐的边机器人所取代,即降低了工作人员的劳动强度,又降低工作人员在工作中的安全隐患。
2、在现如今的加工车间或存放车间内,经常会有一些设置在高处的机械或存在高处的货物,在需要对机械进行检修查看,或货物清点时,若仍采用人工手动操作,则需要工作人员进行爬高操作,特别是对于一些空间狭小的位置,无法为人工提供充足的站立空间,极易造成工作人员的受伤等情况发生,而采用机器人进行车间的巡逻操作,则有效的避免了此类事件的发生。
3、但目前多数的巡逻机器人在车间内移动,由于车间自身空间较大,顶部距地面高度较高,特别是像龙门吊之类的悬吊装置,对于巡逻机器人来说其高度过高,为了保证机器人升降高度足够,增设的叠加升降机构很容易造成机器人体积过大,在移动时易与周围物件发生磕碰,并且机器人在将检测用扫描探头提高时,很容易造成机器人自身重心偏向,进而影响到机器人在地面上的水平移动,很容易在机器人移动的侧翻等情况。为此,我们提出了一种用于机器人的升降旋转装置
技术实现思路
1、针对现有用于机器人的升降旋转装置的不足,本发明提供了一种用于机器人的升降旋转装置,具备保证机器人整体占据体积较小的前提下,提高机器人的最大升降高度,以及为机器人升降时提供可调控收纳的辅助支撑,提高机器人升高后的重心支撑效果的优点,解决了上述背景技术中提出的问题。
2、本发明的技术方案是这样实现的:
3、一种用于机器人的升降旋转装置,包括底座,所述底座的底部安装有移动小车,所述底座的顶部垂直安装有支撑箱体,支撑箱体的内部两端均沿底座的宽度方向对称设有多个等距排列的第二条形板,第二条形板沿支撑箱体的长度方向设置,两个所述第二条形板相对远离的一侧均设有多个等距排列的第一条形板,第一条形板沿第二条形板的长度方向设置,且其中远离第二条形板的第一条形板紧贴支撑箱体的内壁固定,所述第一条形板靠近第二条形板的一侧均沿第一条形板的长度方向设有电动滑轨,电动滑轨至少设有两个,且对称固定在第一条形板上,所述第二条形板和第一条形板远离第二条形板的一侧底部均安装有电动滑块,电动滑块与其相邻的电动滑轨对应连接;
4、所述支撑箱体的上方设有支撑板,支撑板平行于底座,且支撑板与第二条形板固定连接,所述支撑板的上方设有转动块,转动块的底部安装有驱动电机,驱动电机垂直固定在支撑板,所述转动块一侧安装有扫描探头。
5、可选的,每个所述第一条形板的两侧和第二条形板的两侧均设有多个等距排列的条形块,条形块均沿其对应的第一条形板和第二条形板的长度方向设置。
6、可选的,所述支撑箱体的顶部两端均沿支撑箱体的长度方向设有第一条形槽,所述第一条形槽的两侧均沿第一条形槽的长度方向只有第二条形槽,所述第二条形槽的底部沿第二条形槽的长度方向安装有第一气缸,第一气缸的顶部均安装有移动块,所述第一条形槽的内部沿第一条形槽的长度方向设有l型杆,l型杆的一端两侧均通过转轴与移动块对应连接,且该转轴上套接有扭簧,扭簧的一端固定在移动块上,且另一端固定在l型杆上,所述l型杆的另一端设有开槽,开槽内通过转轴转动安装有支撑杆,支撑杆的另一端安装有连接板,连接板的顶部安装有至少两个万向轮。
7、可选的,所述支撑箱体的两端均沿支撑箱体的长度方向安装有缓冲垫,缓冲垫为弹性橡胶垫。
8、可选的,每个所述第一条形槽的顶部靠近支撑杆的一侧设有限位槽,限位槽与l型杆相对应。
9、可选的,每个所述l型杆靠近支撑杆的一端安装有限位板,限位板为倾斜设置,所述l型杆的另一端沿其该端的长度方向设有第三条形槽,第三条形槽内远离支撑杆的一端设有倾斜切面,所述第三条形槽内设有第二气缸,第二气缸靠近倾斜切面的一端通过转轴转动安装在第三条形槽内,且另一端的两侧均通过转轴转动安装有支撑块,支撑块为三角形块,且与支撑杆相对应。
10、与现有技术相比,本发明通过多个第一条形板逐次升降,在有限的空间内最大程度的提高机器人的升降高度,减少机器人自身的空间占据,方便机器人在车间巡逻时更好的移动,同时配合第一气缸的推动,使得支撑杆可向两端进行展开,从而对升高后的机器人两端进行支撑,保证机器人升高后时的移动稳定,不会因重心升高而发生移动不稳侧翻等情况。
技术特征:
1.一种用于机器人的升降旋转装置,包括底座(1),其特征在于,所述底座(1)的底部安装有移动小车(2),所述底座(1)的顶部垂直安装有支撑箱体(3),支撑箱体(3)的内部两端均沿底座(1)的宽度方向对称设有多个等距排列的第二条形板(7),第二条形板(7)沿支撑箱体(3)的长度方向设置,两个所述第二条形板(7)相对远离的一侧均设有多个等距排列的第一条形板(4),第一条形板(4)沿第二条形板(7)的长度方向设置,且其中远离第二条形板(7)的第一条形板(4)紧贴支撑箱体(3)的内壁固定,所述第一条形板(4)靠近第二条形板(7)的一侧均沿第一条形板(4)的长度方向设有电动滑轨(5),电动滑轨(5)至少设有两个,且对称固定在第一条形板(4)上,所述第二条形板(7)和第一条形板(4)远离第二条形板(7)的一侧底部均安装有电动滑块(6),电动滑块(6)与其相邻的电动滑轨(5)对应连接;
2.根据权利要求1所述的一种用于机器人的升降旋转装置,其特征在于,每个所述第一条形板(4)的两侧和第二条形板(7)的两侧均设有多个等距排列的条形块,条形块均沿其对应的第一条形板(4)和第二条形板(7)的长度方向设置。
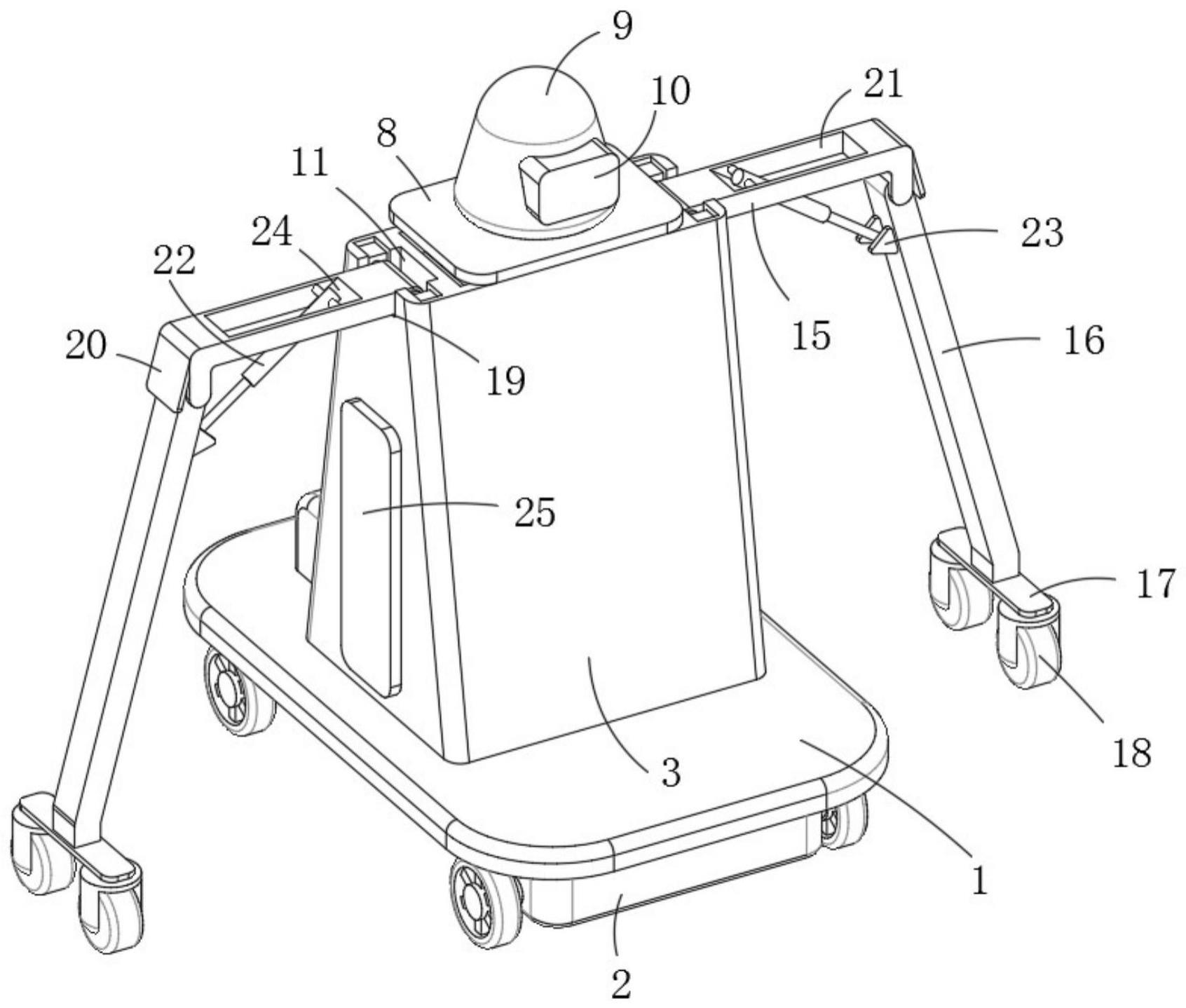
3.根据权利要求1所述的一种用于机器人的升降旋转装置,其特征在于,所述支撑箱体(3)的顶部两端均沿支撑箱体(3)的长度方向设有第一条形槽(11),所述第一条形槽(11)的两侧均沿第一条形槽(11)的长度方向只有第二条形槽(12),所述第二条形槽(12)的底部沿第二条形槽(12)的长度方向安装有第一气缸(13),第一气缸(13)的顶部均安装有移动块(14),所述第一条形槽(11)的内部沿第一条形槽(11)的长度方向设有l型杆(15),l型杆(15)的一端两侧均通过转轴与移动块(14)对应连接,且该转轴上套接有扭簧,扭簧的一端固定在移动块(14)上,且另一端固定在l型杆(15)上,所述l型杆(15)的另一端设有开槽,开槽内通过转轴转动安装有支撑杆(16),支撑杆(16)的另一端安装有连接板(17),连接板(17)的顶部安装有至少两个万向轮(18)。
4.根据权利要求1所述的一种用于机器人的升降旋转装置,其特征在于,所述支撑箱体(3)的两端均沿支撑箱体(3)的长度方向安装有缓冲垫(25),缓冲垫(25)为弹性橡胶垫。
5.根据权利要求3所述的一种用于机器人的升降旋转装置,其特征在于,每个所述第一条形槽(11)的顶部靠近支撑杆(16)的一侧设有限位槽(19),限位槽(19)与l型杆(15)相对应。
6.根据权利要求1所述的一种用于机器人的升降旋转装置,其特征在于,每个所述l型杆(15)靠近支撑杆(16)的一端安装有限位板(20),限位板(20)为倾斜设置,所述l型杆(15)的另一端沿其该端的长度方向设有第三条形槽(21),第三条形槽(21)内远离支撑杆(16)的一端设有倾斜切面(24),所述第三条形槽(21)内设有第二气缸(22),第二气缸(22)靠近倾斜切面(24)的一端通过转轴转动安装在第三条形槽(21)内,且另一端的两侧均通过转轴转动安装有支撑块(23),支撑块(23)为三角形块,且与支撑杆(16)相对应。
技术总结
本发明公开了一种用于机器人的升降旋转装置,涉及机器人调节技术领域,具体包括底座,所述底座的底部安装有移动小车,所述底座的顶部垂直安装有支撑箱体,支撑箱体的内部两端均沿底座的宽度方向对称设有多个等距排列的第二条形板,第二条形板沿支撑箱体的长度方向设置,两个所述第二条形板相对远离的一侧均设有多个等距排列的第一条形板。通过多个第一条形板逐次升降,在有限的空间内最大程度的提高机器人的升降高度,减少机器人自身的空间占据,同时配合第一气缸的推动,使得支撑杆可向两端进行展开,从而对机器人两端进行支撑,保证机器人升高后时的移动稳定,不会因重心升高而发生移动不稳侧翻等情况。
技术研发人员:黄小华,李志滔,陈志满,龙腾发
受保护的技术使用者:广东天太机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!