一种基于5G的安防巡逻机器人的制作方法
本发明涉及机器人,具体为一种基于5g的安防巡逻机器人。
背景技术:
1、随着近年来的通讯的发展,5g网络逐渐进入各行各业,通过5g网络的高传输、低延迟等特点,使得更多的设备可通过5g网络进行控制,实现更加精准的自动化;5g对于人工智能产品的研发和落地应用具有非常积极的意义,通过5g能够进一步完善人工智能产品的应用场景,5g还可以应用到巡检机器人中,使得巡检机器人更加智能,易于控制,使机器人可适应更复杂的场景;管道安防巡逻机器人是一种可沿细小管道内部或外部自动行走,在工作人员的遥控操作或计算机自动控制下,对管道进行安防巡逻。
2、现有技术如公开号为cn210978971u的专利公开了一种直轮驱动式管道巡检机器人,包括用于支撑的机架装置,还包括周向均匀分布用于驱动前进的行进装置,所述行进装置与所述机架装置之间安装有弹性装置,所述机架装置内部安装有调整装置。该实用新型所述的一种直轮驱动式管道巡检机器人,通过调整装置的设置,便于调整行进装置的展开幅度,增加管道巡检机器人对不同管径的适应性,通过弹性装置的设置,保证了行进装置与管壁的贴合,增加了管道巡检机器人的可靠性,通过周向均匀分布的设置,保证了管道巡检机器人始终处在管道轴线中心,增加了检查的均匀性和准确。
3、上述现有技术中有明显的有益效果,但仍存在不足:
4、上述现有技术中安防机器人在进入孔径较小的管道内时,需将多个滚轮均向壳体的后方调整,但这种调节会导致整体的支撑点靠后,影响机器人的整体稳定性,对管道的安防巡逻的适应性差,为此提出了一种基于5g的安防巡逻机器人。
技术实现思路
1、针对现有技术的不足,本发明提供一种基于5g的安防巡逻机器人,提高安防巡检机器人对不同管径管道巡检的适应性和巡检的稳定性。
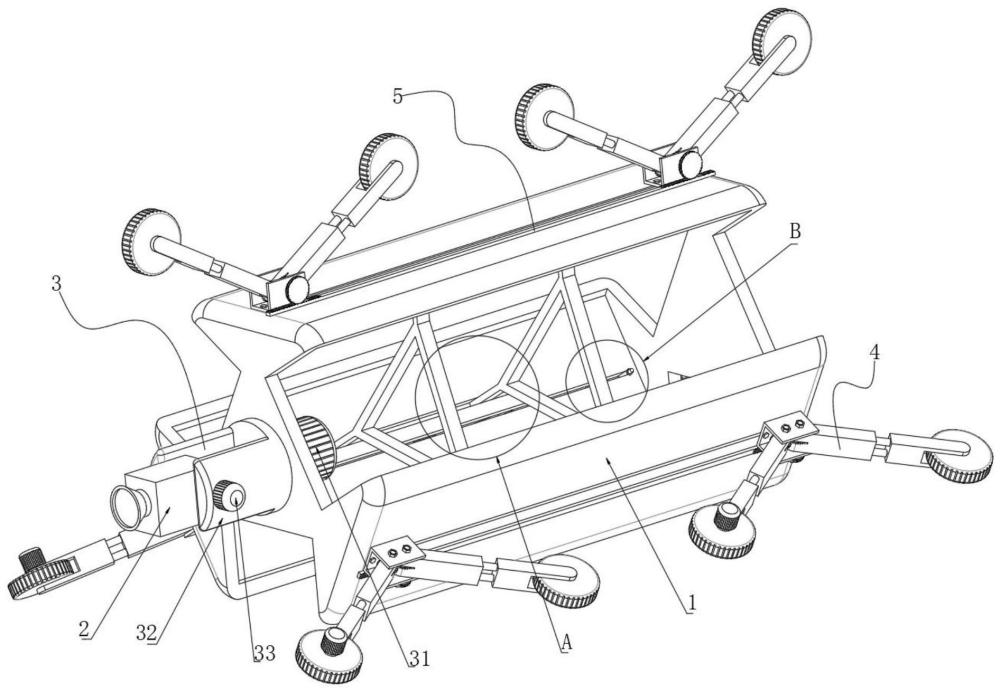
2、为实现上述目的,本发明提供如下技术方案:一种基于5g的安防巡逻机器人,包括机架和巡检探头,机架的多侧外壁均安装有支撑移动单元,多个支撑移动单元均匀分布,机架的一端安装有调节单元,巡检探头安装在调节单元上,调节单元对巡检探头的角度进行调节,支撑移动单元包括安装在机架侧壁的安装架,安装架的内壁转动连接有两个螺纹杆,螺纹杆的一端穿设至安装架外并螺纹连接有螺母,螺纹杆的外壁转动连接有连接杆,连接杆的另一端转动连接有滚轮,其中一个螺纹杆外壁的连接杆外端侧壁安装有第三电机,第三电机的输出轴与相邻滚轮的一侧固定连接,两个连接杆对称分布且呈八字状,机架的外壁滑动连接有用于同步调节多个支撑移动单元的同步单元。
3、优选地,连接杆包括固定杆和活动杆,固定杆的一端开设有多个滑槽,滑槽内滑动连接有连杆,连杆的一端穿设至滑槽外并与活动杆的一端固定连接,滚轮和第三电机均安装在活动杆远离连杆的一端,滚轮与活动杆转动连接,滑槽内安装有弹簧,弹簧的两端分布与连杆的一端和滑槽的内壁相抵,固定杆与螺纹杆固定连接。
4、优选地,支撑移动单元还包括开设在固定杆一端的安装槽,螺纹杆的外壁固定连接有位于安装槽内的第二齿轮,安装架内两个固定杆端部的第二齿轮啮合连接。
5、优选地,机架单侧的支撑移动单元的数量为两个,两个支撑移动单元分别与机架两端侧壁固定连接。
6、优选地,支撑移动单元还包括第一齿轮,支撑移动单元中的其中一个螺纹杆远离螺母的一端穿设至安装架外并与第一齿轮固定连接,同步单元包括齿条板,齿条板滑动连接在机架的外壁,位于机架同侧两个支撑移动单元中的两个第一齿轮均与齿条板啮合连接。
7、优选地,机架的多侧外壁均开设有调节槽,同步单元还包括多个连接架,连接架位于机架内,连接架的端部穿设多个调节槽并与齿条板的侧壁固定连接。
8、优选地,机架的多侧外壁均开设有穿槽,安装架通过在内壁穿设螺栓,螺栓的一端穿设穿槽配合螺帽锁定安装在机架的侧壁。
9、优选地,调节单元包括第一电机,第一电机安装在机架的一端内壁,第一电机的输出轴贯穿至机架外并固定连接有转动架,巡检探头的一端转动连接在转动架内,转动架的外壁安装有第二电机,第二电机的输出轴贯穿至转动架内并与巡检探头与转动架的转动轴心处固定连接。
10、优选地,机架的内壁安装有5g控制模块,5g控制模块的输出端分别与第一电机、第二电机、第三电机和巡检探头电性连接。
11、与现有技术对比,本发明具备以下有益效果:
12、1、本发明通过设置机架多侧的支撑移动单元中的两个连接杆呈八字状展开,使得连接杆外端的滚轮可稳定地对机架进行支撑,且连接杆的角度可调,可适应不同管径的巡检,稳定性好,提高适应性,保障巡检任务。
13、2、本发明通过设置连接杆具备缓冲结构,从而适应不同凹凸面进行移动,提高实用性和移动的稳定性。
14、3、本发明通过设置通过在固定杆端部安装第二齿轮,使得两个固定杆在转动时通过第二齿轮的啮合转动同步向相反方向转动,方便调节角度,使得两个固定杆与机架外壁之间的倾斜角度相等,提高实用性。
15、4、本发明通过设置同步单元中的多个齿条板通过连接架连接,齿条板配合支撑移动单元中的第一齿轮使得在调节其中一个固定杆的角度时,位于机架同侧和其他侧的固定杆均同步进行转动,便于对固定杆的角度进行调节。
16、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种基于5g的安防巡逻机器人,包括机架(1)和巡检探头(2),其特征在于,机架(1)的多侧外壁均安装有支撑移动单元(4),多个支撑移动单元(4)均匀分布,机架(1)的一端安装有调节单元(3),巡检探头(2)安装在调节单元(3)上,调节单元(3)对巡检探头(2)的角度进行调节,支撑移动单元(4)包括安装在机架(1)侧壁的安装架(41),安装架(41)的内壁转动连接有两个螺纹杆(46),螺纹杆(46)的一端穿设至安装架(41)外并螺纹连接有螺母(47),螺纹杆(46)的外壁转动连接有连接杆(42),连接杆(42)的另一端转动连接有滚轮(43),其中一个螺纹杆(46)外壁的连接杆(42)外端侧壁安装有第三电机(44),第三电机(44)的输出轴与相邻滚轮(43)的一侧固定连接,两个连接杆(42)对称分布且呈八字状,机架(1)的外壁滑动连接有用于同步调节多个支撑移动单元(4)的同步单元(5)。
2.根据权利要求1所述的一种基于5g的安防巡逻机器人,其特征在于,连接杆(42)包括固定杆(421)和活动杆(424),固定杆(421)的一端开设有多个滑槽(422),滑槽(422)内滑动连接有连杆(423),连杆(423)的一端穿设至滑槽(422)外并与活动杆(424)的一端固定连接,滚轮(43)和第三电机(44)均安装在活动杆(424)远离连杆(423)的一端,滚轮(43)与活动杆(424)转动连接,滑槽(422)内安装有弹簧(425),弹簧(425)的两端分布与连杆(423)的一端和滑槽(422)的内壁相抵,固定杆(421)与螺纹杆(46)固定连接。
3.根据权利要求2所述的一种基于5g的安防巡逻机器人,其特征在于,支撑移动单元(4)还包括开设在固定杆(421)一端的安装槽(48),螺纹杆(46)的外壁固定连接有位于安装槽(48)内的第二齿轮(49),安装架(41)内两个固定杆(421)端部的第二齿轮(49)啮合连接。
4.根据权利要求3所述的一种基于5g的安防巡逻机器人,其特征在于,机架(1)单侧的支撑移动单元(4)的数量为两个,两个支撑移动单元(4)分别与机架(1)两端侧壁固定连接。
5.根据权利要求4所述的一种基于5g的安防巡逻机器人,其特征在于,支撑移动单元(4)还包括第一齿轮(45),支撑移动单元(4)中的其中一个螺纹杆(46)远离螺母(47)的一端穿设至安装架(41)外并与第一齿轮(45)固定连接,同步单元(5)包括齿条板(51),齿条板(51)滑动连接在机架(1)的外壁,位于机架(1)同侧两个支撑移动单元(4)中的两个第一齿轮(45)均与齿条板(51)啮合连接。
6.根据权利要求5所述的一种基于5g的安防巡逻机器人,其特征在于,机架(1)的多侧外壁均开设有调节槽(7),同步单元(5)还包括多个连接架(52),连接架(52)位于机架(1)内,连接架(52)的端部穿设多个调节槽(7)并与齿条板(51)的侧壁固定连接。
7.根据权利要求4所述的一种基于5g的安防巡逻机器人,其特征在于,机架(1)的多侧外壁均开设有穿槽(8),安装架(41)通过在内壁穿设螺栓,螺栓的一端穿设穿槽(8)配合螺帽锁定安装在机架(1)的侧壁。
8.根据权利要求1所述的一种基于5g的安防巡逻机器人,其特征在于,调节单元(3)包括第一电机(31),第一电机(31)安装在机架(1)的一端内壁,第一电机(31)的输出轴贯穿至机架(1)外并固定连接有转动架(32),巡检探头(2)的一端转动连接在转动架(32)内,转动架(32)的外壁安装有第二电机(33),第二电机(33)的输出轴贯穿至转动架(32)内并与巡检探头(2)与转动架(32)的转动轴心处固定连接。
9.根据权利要求8所述的一种基于5g的安防巡逻机器人,其特征在于,机架(1)的内壁安装有5g控制模块(6),5g控制模块(6)的输出端分别与第一电机(31)、第二电机(33)、第三电机(44)和巡检探头(2)电性连接。
技术总结
本发明涉及机器人技术领域,且公开了一种基于5G的安防巡逻机器人,包括机架和巡检探头,机架的多侧外壁均安装有支撑移动单元,多个支撑移动单元均匀分布,机架的一端安装有调节单元,巡检探头安装在调节单元上,调节单元对巡检探头的角度进行调节,支撑移动单元包括安装在机架侧壁的安装架,安装架的内壁转动连接有两个螺纹杆,螺纹杆的一端穿设至安装架外并螺纹连接有螺母,螺纹杆的外壁转动连接有连接杆,连接杆的另一端转动连接有滚轮;发明通过设置机架多侧的支撑移动单元中的两个连接杆呈八字状展开,使得连接杆外端的滚轮可稳定地对机架进行支撑,且连接杆的角度可调,可适应不同管径的巡检,稳定性好,提高适应性,保障巡检任务。
技术研发人员:潘智淳,阮翠玲,翁昌鉴,吴敬,夏兆祺
受保护的技术使用者:中时讯通信建设有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!