机器人的任务规划方法、装置、设备及存储介质与流程
本申请涉及智能机器人控制,尤其涉及一种机器人的任务规划方法、装置、电子设备及存储介质。
背景技术:
1、随着机器人技术的发展,机器人已经能够替代人们完成许多脏累、危险、粗重或反复无聊的工作。其被广泛应用于制造业、建筑业、石油钻探、矿石开采、太空探索、水下探索、毒害物质清理、搜救、医学以及军事领域等,对人们的声场生活起到了重要的作用。
2、在机器人执行任务时,在获得输入指令后,对指令任务进行分析和拆解,制定和规划完成指令任务所需的具体步骤,进而通过逐步执行任务序列子任务的方式来完成输入的指令任务。具体地,在进行任务拆分时,所使用的方法包括:经典数学方法、基于数据库的方法以及模型推理方法,但是都存在有各自的问题,如对于复杂任务和任务的识别和理解不准确及没有准确的理解机器人所处的环境,进而导致在进行任务拆分和规划时不准确。
技术实现思路
1、本申请实施例的目的是提供一种机器人的任务规划方法、装置、电子设备及存储介质,以解决相关技术中因识别和理解不准确而导致任务拆分和规划不合理和不准确的技术问题。
2、第一方面,本申请实施例提供了一种机器人的任务规划方法,包括:
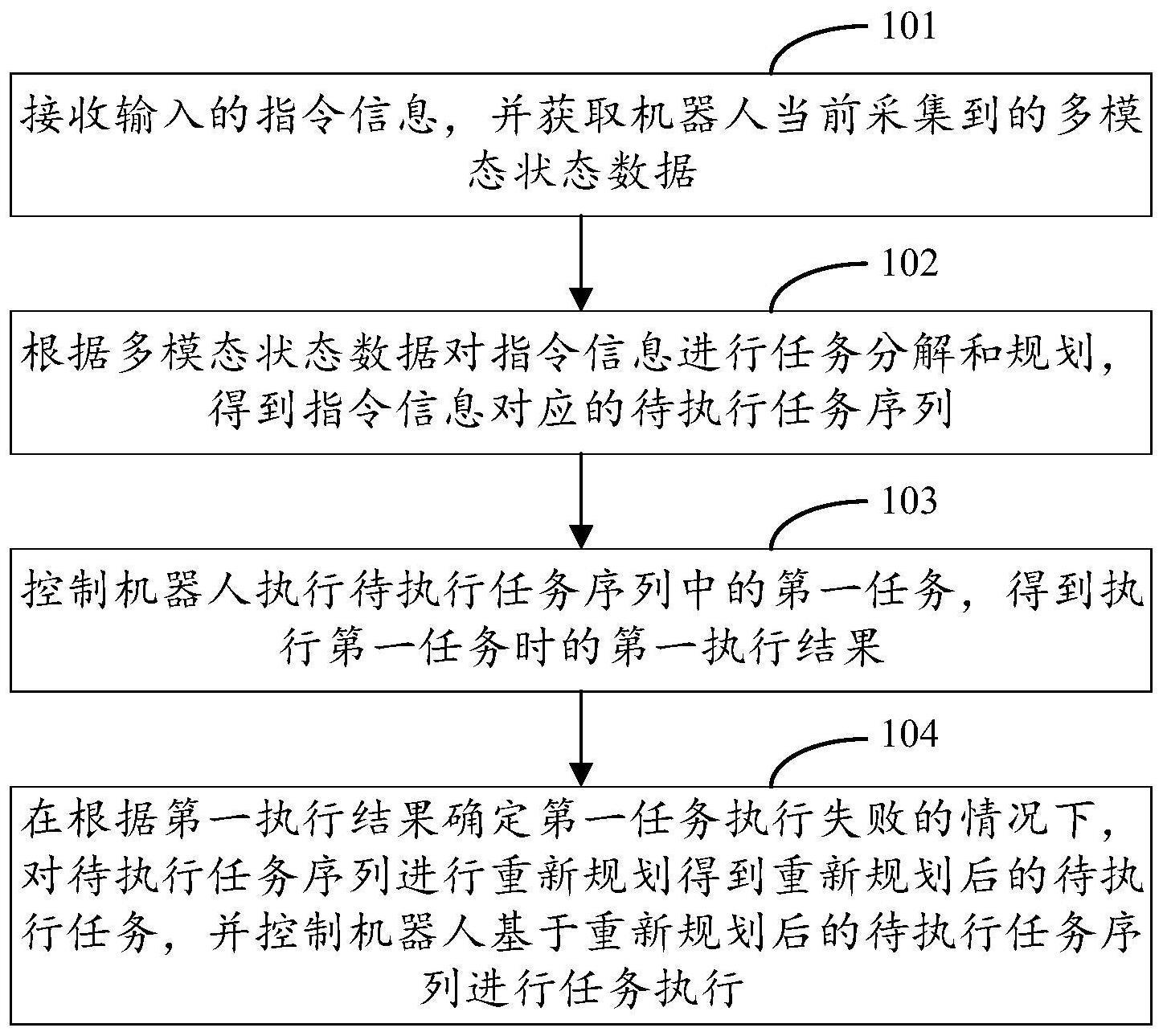
3、接收输入的指令信息,并获取机器人当前采集到的多模态状态数据;
4、根据所述多模态状态数据对所述指令信息进行任务分解和规划,得到所述指令信息对应的待执行任务序列;
5、控制所述机器人执行所述待执行任务序列中的第一任务,得到执行所述第一任务时的第一执行结果;
6、在根据所述第一执行结果确定所述第一任务执行失败的情况下,对所述待执行任务序列进行重新规划得到重新规划后的待执行任务,并控制所述机器人基于重新规划后的待执行任务序列进行任务执行。
7、第二方面,本申请实施例提供了一种机器人的任务规划装置,包括:
8、信息获取模块,用于接收输入的指令信息,并获取机器人当前采集到的多模态状态数据;
9、分解规划模块,用于根据所述多模态状态数据对所述指令信息进行任务分解和规划,得到所述指令信息对应的待执行任务序列;
10、任务执行模块,用于控制所述机器人执行所述待执行任务序列中的第一任务,得到执行所述第一任务时的第一执行结果;
11、监控更新模块,用于在根据所述第一执行结果确定所述第一任务执行失败的情况下,对所述待执行任务序列进行重新规划得到重新规划后的待执行任务,并控制所述机器人基于重新规划后的待执行任务序列进行任务执行。
12、第三方面,本申请实施例提供了一种电子设备,电子设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述的机器人的任务规划方法中的步骤。
13、第四方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的机器人的任务规划方法中的步骤。
14、本申请实施例提供了一种机器人的任务规划方法、装置、电子设备及存储介质,在任务规划过程中,接收输入的指令信息,同时获取机器人当前采集到的多模态状态数据,以根据多模态状态数据对指令信息进行任务分解和规划,得到待执行任务序列,然后控制机器人执行待执行任务序列中的第一任务,并获取在完成第一任务的执行时所得到的第一执行结果,进而根据第一执行结果确定第一任务是否执行成功,而在失败的情况下进行任务的重新规划处理,以根据重新规划后的待执行若任务序列控制机器人进行任务的执行。实现了在机器人的任务规划过程中,通过获取机器人当前所采集到的多模态状态数据,准确的对机器人的当前环境进行确定,提高任务规划的准确性,同时在任务执行过程中,通过实时监控任务完成情况,及时进行任务规划的调整,提高任务规划的合理性和准确性。
技术特征:
1.一种机器人的任务规划方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述指令信息和所述多模态状态数据进行任务分解和规划,得到所述指令信息对应的待执行任务序列之后,还包括:
3.如权利要求2所述的方法,其特征在于,所述根据所述指令信息确定所述待执行任务序列是否正确,包括:
4.如权利要求1所述的方法,其特征在于,所述控制所述机器人执行所述待执行任务序列中的第一任务,得到执行所述第一任务时的第一执行结果,包括:
5.如权利要求1所述的方法,其特征在于,所述在根据所述第一执行结果确定所述第一任务执行失败的情况下,对所述待执行任务序列进行重新规划得到重新规划后的待执行任务,包括:
6.如权利要求5所述的方法,其特征在于,所述确定所述第一任务是否为所述待执行任务序列中的第一个任务之后,还包括:
7.如权利要求1所述的方法,其特征在于,所述控制所述机器人执行所述待执行任务序列中的第一任务,得到执行所述第一任务时的第一执行结果之后,还包括:
8.一种机器人的任务规划装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括处理器、存储器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如权利要求1至7任一项所述的方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的方法中的步骤。
技术总结
本申请公开了一种机器人的任务规划方法、装置、电子设备及存储介质,该方法包括:接收输入的指令信息,并获取机器人当前采集到的多模态状态数据;根据指令信息和多模态状态数据进行任务分解和规划,得到指令信息对应的待执行任务序列;控制机器人执行待执行任务序列中的第一任务,得到执行第一任务时的第一执行结果;在根据第一执行结果确定第一任务执行失败的情况下,对待执行任务序列进行重新规划得到重新规划后的待执行任务,并控制机器人基于重新规划后的待执行任务序列进行任务执行。提高了机器人的任务规划的合理性和准确性。
技术研发人员:陈明,唐成戬
受保护的技术使用者:OPPO广东移动通信有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!