一种机械臂抓取位姿实时调整方法及系统与流程
本发明主要涉及机器人控制,尤其是涉及一种机械臂抓取位姿实时调整方法及系统。
背景技术:
1、近几年有很多面向日常生活中物品抓取的机器人。大多数场景都是在机器人基本坐标系与目标抓取物的位置都是相对静止的情况下进行物体抓取。而当机器人基坐标位置与目标抓取物之间的相对位置实时变化时,则难以进行准确地物体抓取。
2、使用机械臂对物体进行抓取时通常采用视觉技术进行辅助定位,进而确定抓取位姿。使用传统工业二维视觉技术,需要预先设计抓取位置、确定好拍照角度与距离,然后设置被抓物品的图像模板,在图像中定位到目标零件后,根据场景参数将二维信息映射成三维数据。这种方式原理简单,但对被抓物体的摆放以及工作单元的设计都有较高要求,不适合功能的快速部署与迁移。同时,大多数机器人针对静止物体的抓取,使用场景限制较大,极大限制了抓取机器人在工业场景和家庭服务中的应用。因此,在考虑机械臂与目标抓取物体位置相对变化的情况下,实现对目标物体的实时视觉检测,以及实现机械臂末端位姿的实时调整,十分有必要。
技术实现思路
1、本发明所要解决的技术问题
2、提供一种机械臂抓取位姿实时调整方法,解决目前的机械臂在进行目标抓取时无法实时根据位置动态变化的物体的位置变化进行精准抓取的问题。
3、本发明解决上述技术问题所采用的技术方案
4、一种机械臂抓取位姿实时调整方法,包括,获取目标抓取物在机械臂基座下的位置pbase;比较机械臂末端的位置pcure和目标抓取在机械臂基座下的位置pbase,获取机械臂的位置调整量,将机械臂位置调整量转换为机械臂关节角度旋转量,对目标抓取物进行抓取。
5、进一步的,所述获取目标抓取在机械臂基座下的位置pbase具体包括:
6、在机械臂末端设置数据采集模块采集目标抓取物的的图像深度信息和位置数据p,并获取机械臂末端位姿;
7、获取机械臂末端相对于机械臂末端夹爪的齐次变换矩阵t1和机械臂末端夹爪相对于机械臂基座的坐标变换矩阵t2;
8、获取目标抓取物在机械臂基座下的位置pbase=t2·t1·p。
9、进一步的,所述比较机械臂末端的位置p cure和目标抓取在机械臂基座下的位置pbase,获取机械臂需要调整的位置量具体包括,
10、判断机械臂末端当前姿态是否能够达到抓取要求,基于机械臂基座位置与目标抓取物相对于机械臂末端的运动状态获取机械臂末端姿态调整量;
11、判断机械臂末端当前位置与目标抓取物位置的匹配程度,并获取机械臂的位置调节量。
12、进一步的,当目标抓取物相对于机械臂末端的运动状态为目标抓取物静止,机械臂基座运动时,获取机械臂需要调整的位置量具体包括,
13、s1:控制机械臂末端夹爪是与目标抓取物所在平面垂直;
14、s2:控制机械臂末端夹爪开口方向与机械臂基座标x轴方向垂直;
15、s3:控制机械臂末端夹爪位置与目标抓取物所在位置对齐;
16、s5:控制机械臂末端夹爪贴近目标抓取物所在平面,并保持机械臂末端抓夹的z轴位置不变,
17、s6:计算pbase与pcure之间在y轴方向上的差值,获得机械臂在y轴上的位置调整量δy。
18、进一步的,目标抓取物相对于机械臂末端的运动状态为机械臂基座静止,目标抓取物运动时获取机械臂需要调整的位置量具体包括,
19、s1:控制机械臂末端夹爪与目标抓取物所在平面垂直;
20、s2:控制机械臂末端夹爪开口方向与目标抓取物短轴方向平行;
21、s3:控制机械臂末端位于目标抓取物正上方;
22、s4:计算pbase与pcure之间的偏差,获得机械臂在基座标系x轴、y轴和z轴调整量δx、δy、δz。
23、进一步的,所述数据采集模块为深度相机。
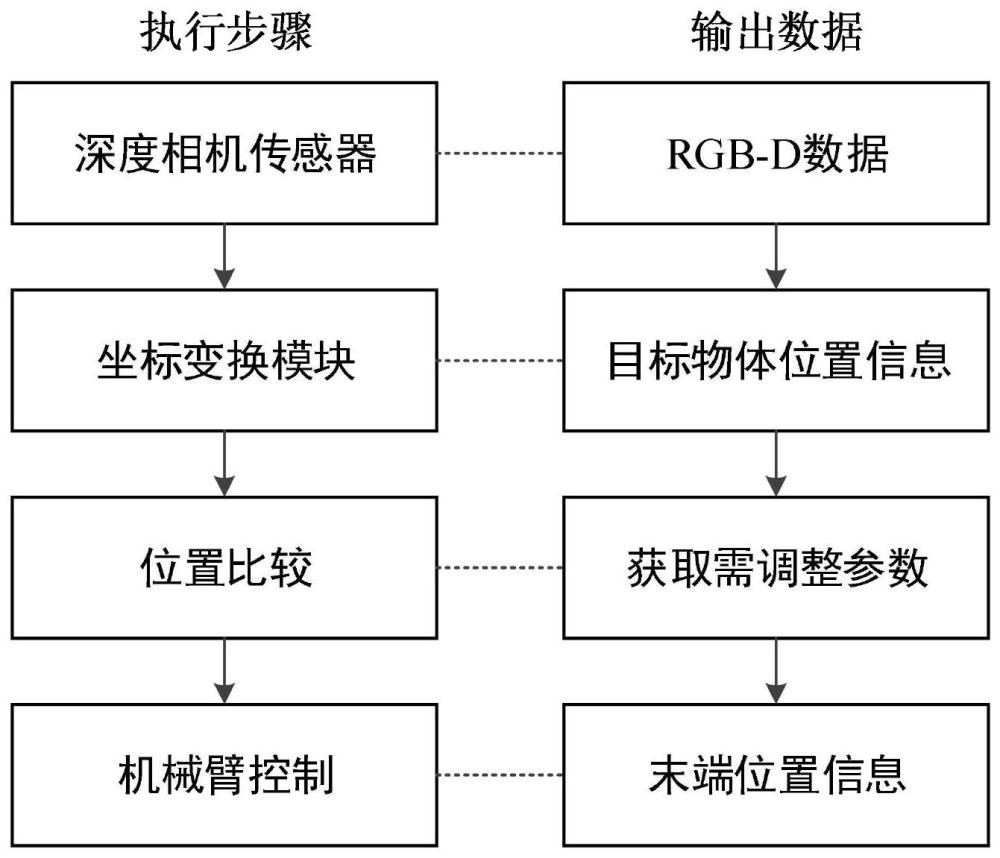
24、基于上述机械臂抓取位姿适时调整的方法,本发明还提供一种机械臂抓取位姿适时调整系统包括数据采集模块、坐标变换模块、位姿适时调整模块;
25、所述数据采集模块,用于实时采集目标抓取物的图像深度数据与位置数据,并传递给坐标变换模块;
26、所述坐标变换模块,用于接收数据采集模块中的图像深度信息与位置数据,同时读取机械臂此时的末端位姿,计算目标抓取物在机械臂基座标下的位置;
27、所述位姿实时调整模块包括位置比较模块、机械臂运动模块;所述位置比较模块用以比较当前机械臂末端工具的位置pcure与目标抓取物位置pbase,获取机械臂需要调整的量;所述机械臂运动模块,通过逆运动学解算将位置量转换成为机械臂关节角度旋转量。
28、本发明的有益效果
29、本发明所述的一种机械臂抓取位姿实时调整方法及系统,通过搭载于机械臂夹爪上的深度相机采集环境信息,通过坐标变换不断给机械臂发送目标位置,同时机械臂通过比较目标位置与此时的末端位姿,不断调整末端位姿以对准目标抓取物体,实现准确抓取。该方法能够实时给出机械臂下一步所要达到的位姿信息,既提高了操作的便捷程度,又提高了对运动中的待抓取物准确性。
30、本发明中还对机械臂和目标抓取物的相对运动状态进行了分类,针对机械臂运动,目标抓取物相对静止和机械臂静止和目标抓取物运动分别设置机械臂位置调整量,能够有效地针对不同目标抓取物运动情况分类进行抓取。
技术特征:
1.一种机械臂抓取位姿实时调整方法,其特征在于,包括,
2.根据权利要求1所述的一种机械臂抓取位姿实时调整方法,其特征在于,所述获取目标抓取在机械臂基座下的位置pbase具体包括:
3.根据权利要求2所述一种机械臂抓取位姿实时调整的方法,其特征在于,所述比较机械臂末端的位置p cure和目标抓取在机械臂基座下的位置pbase,获取机械臂需要调整的位置量具体包括,
4.根据权利要求3所述的一种机械臂抓取位姿实时调整的方法,其特征在于,当目标抓取物相对于机械臂末端的运动状态为目标抓取物静止,机械臂基座运动时,获取机械臂需要调整的位置量具体包括,
5.根据权利要求3所述的一种机械臂抓取位姿实时调整的方法,其特征在于,目标抓取物相对于机械臂末端的运动状态为机械臂基座静止,目标抓取物运动时获取机械臂需要调整的位置量具体包括,
6.一种机械臂抓取位姿实时调整系统,用于实现权利要求1-5任意一项所述的一种机械臂抓取位姿实时调整的方法,其特征在于,包括数据采集模块、坐标变换模块、位姿实时调整模块;
7.根据权利要求6所述的一种机械臂抓取位姿实时调整系统,其特征在于,所述数据采集模块设置在机械臂夹爪上,所述数据采集模块为深度相机。
技术总结
本发明主要涉及机器人控制技术领域。为了解决目前的机械臂在进行目标抓取时无法针对位置动态变化的物体进行精准抓取的问题,本发明提供一种机械臂抓取位姿实时调整方法及系统,获取目标抓取物在机械臂基座下的位置P<subgt;base</subgt;;比较机械臂末端的位置P<subgt;cure</subgt;和目标抓取在机械臂基座下的位置P<subgt;base</subgt;,获取机械臂的位置调整量,将机械臂位置调整量转换为机械臂关节角度旋转量,对目标抓取物进行抓取。
技术研发人员:刘孟红,刘艳娇,黄瑞,穆逢君,展华益
受保护的技术使用者:四川启睿克科技有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!