一种可滑动式机械手的夹持防掉落结构的制作方法
本发明涉及新一代信息,具体为一种可滑动式机械手的夹持防掉落结构。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点,机械手是最早出现的工业机器人,也是最早出现的现代机器人,它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门,在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。也就是机械手的最大优势可以重复的做同一动作在机械正常情况下永远也不会觉得累!机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。工业机械手机器人的一个重要分支,在机械手的对物体进行抓取的过程中则需要使用机械夹持,一般为在末端放置夹持器,夹持器是握住物体进而操控物体的设备。它能够在执行某些动作的同时夹住和松开物体。运动设备往往模仿人体的运动,就夹持器而言,模仿的是手指的运动。“手指”本身并不属于夹持器,它们只是用于夹持物体的专用定制工具,称为“夹片”,夹持器一般有两种主要的夹持动作,外部夹持:这是最普遍的夹持物体的方法,这种方法最为简单,需要的行程长度也最短。夹持器夹片闭合时,夹持器所施加的夹紧力将夹住该物体。内部夹持:在某些应用中,由于物体几何形状的原因,或者由于需要接近物体外部,因而需要从中心夹持物体。这种情况下,夹持器将通过扩张力夹持物体,同时为了方便夹持物的移动通常会配套使用一个移动或滑动装置。
2、传统的机械手的夹持装置一般通过多个夹持的手臂对物体进行抓取,而此抓取用的夹持杆多配用多个动力源或者需其他的机构进行辅助才可牢牢抓住物体,同时传统的机械手在夹持物体后想要移动物体的位置,则需要多个机构相互配合使用,才可以使物体进行移动,无法快速移动物体完成物体的位置转换,并且在移动过程中如果想让物体的状态不变则需要机械手上的转动轴配合机械手进行转动,会使整个机械手的转动幅度变大,在移动过程中会发送与其他物体碰撞的问题。
技术实现思路
1、本发明的目的在于提供一种可滑动式机械手的夹持防掉落结构,以解决上述背景技术中提出的传统的机械手的夹持装置需要通过多个夹持的手臂对物体进行抓取,同时传统的机械手在夹持物体后想要移动物体的位置,则需要多个机构相互配合使用,无法快速移动物体完成物体的位置转换,并且在移动过程中如果想让物体的状态不变则需要机械手上的转动轴配合机械手进行转动,会使整个机械手的转动幅度变大,在移动过程中会发送与其他物体碰撞的问题。
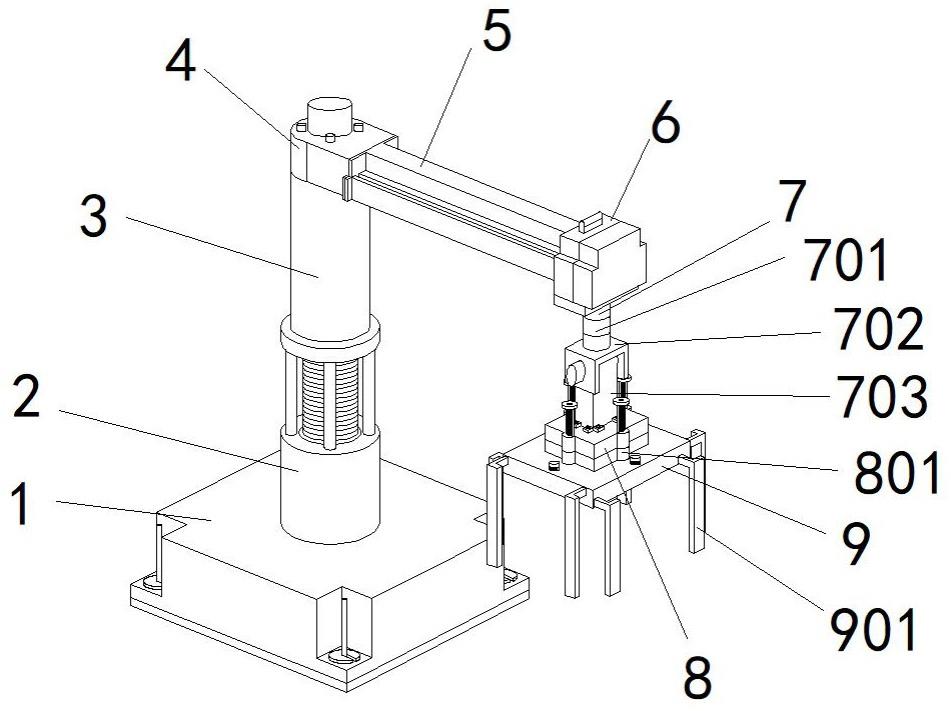
2、为实现上述目的,本发明提供如下技术方案:一种可滑动式机械手的夹持防掉落结构,包括底座,所述底座的上方设置有固定管,所述固定管的底面与底座的顶面固定连接,所述固定管的上方设置有转动支撑杆,所述转动支撑杆的上端设置有连接块,所述连接块的一侧设置有滑道杆,所述滑道杆的一端设置有自由活动块,所述自由活动块的下方设置有精度转向机构,所述精度转向机构包括有自转轴和u形限位块,所述自转轴的底面与u形限位块的顶面固定连接,所述u形限位块的下方设置有转动连接杆,所述转动连接杆的下方设置有精度伸缩结构,所述精度伸缩结构包括有精度转轴,所述精度伸缩结构的下方设置有夹持机构,所述夹持机构包括有伸缩夹持杆。
3、优选的,所述底座的底面设置有橡胶板,所述底座的四角开设有放置槽,所述放置槽的顶面设置有哑铃片限位杆,所述哑铃片限位杆的外圆壁设置有开口哑铃片,所述固定管的内部设置有调向转轴,所述固定管的顶面设置有轨道杆,所述调向转轴的顶面设置有螺纹转杆,所述转动支撑杆的底面设置有限位活动环,所述转动支撑杆的顶面设置有圆头限位杆,所述转动支撑杆的顶面设置有圆头限位轴。
4、优选的,所述滑道杆的一侧设置有连接板,所述连接板的一侧设置有连接钉,所述滑道杆的顶面设置有滑轮槽,所述滑道杆的一端设置有t形挡块。
5、优选的,所述自由活动块的顶面设置有电机,所述自由活动块的内部开设有活动槽,所述活动槽的内部设置有两个滑轮,所述自由活动块的底面设置有连接底板。
6、优选的,所述u形限位块的一侧设置有角度转向轴,所述转动连接杆的底面设置有固定块,所述固定块的顶面设置有固定钉。
7、优选的,所述精度转向机构的顶面设置有螺纹连接钉,所述精度转向机构的顶面设置有固定连接杆。
8、优选的,所述精度转轴的上方设置有精转螺纹杆,所述精度转轴的上方设置有限位短杆,所述限位短杆的顶面设置有带孔限位圆块,所述精度转轴的外部设置有保护外壳,所述精度伸缩结构的顶面开设有固定连接孔。
9、优选的,所述夹持机构包括有伸缩夹持杆和夹持联动轴,所述伸缩夹持杆的内部设置有联动齿杆。
10、与现有技术相比,本发明的有益效果是:
11、1、该一种可滑动式机械手的夹持防掉落结构,在进行日常使用的过程中,通过转动支撑杆可以使夹持机构移动到需要被夹持的物体的附件,在通过精度转向机构来调整夹持机构的转向,以最佳的角度来配合夹持物进行夹取,在通过精度伸缩结构再去调整夹持机构与夹持物的距离,使夹持物与夹持机构的夹杆精密贴合,相互配合使用,可以简单快捷的对夹持物进行快速夹取,并使夹取物与夹杆精密贴合,有效减少了夹持组件相互共同配合使用的繁琐,并有效避免了夹持物在夹持过程中会发送松动的问题;
12、2、该一种可滑动式机械手的夹持防掉落结构,在进行日常使用的过程中,可通过转动支撑杆来调整夹持机构与夹持物的大致位置,使夹持机构在夹持物的上方,通过设置的精度转向机构和精度伸缩机构可以对夹持机构进行位置上的调整,使夹持机构的夹持杆与夹持物紧密贴合,通过设置的自由活动块可以使夹持机构快速移动,可以使夹持物体快速的移动位置;
13、3、该一种可滑动式机械手的夹持防掉落结构,在进行日常使用的过程中,通过设置的转动支撑杆,可以使夹持机构在水平方向进行自由的转动,使夹持机构可以快速的移动到夹持物的上方,通过设置的精度转向机构和精度伸缩机构可以对夹持机构进行小范围的调整,避免了夹持机构在夹持物体时使组件配合运作幅度过大碰撞其他物体的问题,同时通过设置的自由活动块,可以使夹持机构在移动过程中快速移动到指定位置,并不需要其他组件配合转动,有效避免物体移动式需要组件配合运作幅度过大碰撞其他物体的问题。
技术特征:
1.一种可滑动式机械手的夹持防掉落结构,包括底座(1),其特征在于:所述底座(1)的上方设置有固定管(2),所述固定管(2)的底面与底座(1)的顶面固定连接,所述固定管(2)的上方设置有转动支撑杆(3),所述转动支撑杆(3)的上端设置有连接块(4),所述连接块(4)的一侧设置有滑道杆(5),所述滑道杆(5)的一端设置有自由活动块(6),所述自由活动块(6)的下方设置有精度转向机构(7),所述精度转向机构(7)包括有自转轴(701)和u形限位块(702),所述自转轴(701)的底面与u形限位块(702)的顶面固定连接,所述u形限位块(702)的下方设置有转动连接杆(703),所述转动连接杆(703)的下方设置有精度伸缩结构(8),所述精度伸缩结构(8)包括有精度转轴(801),所述精度伸缩结构(8)的下方设置有夹持机构(9),所述夹持机构(9)包括有伸缩夹持杆(901)。
2.根据权利要求1所述的一种可滑动式机械手的夹持防掉落结构,其特征在于:所述底座(1)的底面设置有橡胶板(101),所述底座(1)的四角开设有放置槽(102),所述放置槽(102)的顶面设置有哑铃片限位杆(103),所述哑铃片限位杆(103)的外圆壁设置有开口哑铃片(104),所述固定管(2)的内部设置有调向转轴(201),所述固定管(2)的顶面设置有轨道杆(202),所述调向转轴(201)的顶面设置有螺纹转杆(203),所述转动支撑杆(3)的底面设置有限位活动环(301),所述转动支撑杆(3)的顶面设置有圆头限位杆(302),所述转动支撑杆(3)的顶面设置有圆头限位轴(303)。
3.根据权利要求1所述的一种可滑动式机械手的夹持防掉落结构,其特征在于:所述滑道杆(5)的一侧设置有连接板(501),所述连接板(501)的一侧设置有连接钉(502),所述滑道杆(5)的顶面设置有滑轮槽(503),所述滑道杆(5)的一端设置有t形挡块(504)。
4.根据权利要求1所述的一种可滑动式机械手的夹持防掉落结构,其特征在于:所述自由活动块(6)的顶面设置有电机(601),所述自由活动块(6)的内部开设有活动槽(602),所述活动槽(602)的内部设置有两个滑轮(603),所述自由活动块(6)的底面设置有连接底板(604)。
5.根据权利要求1所述的一种可滑动式机械手的夹持防掉落结构,其特征在于:所述u形限位块(702)的一侧设置有角度转向轴(704),所述转动连接杆(703)的底面设置有固定块(707),所述固定块(707)的顶面设置有固定钉(708)。
6.根据权利要求1所述的一种可滑动式机械手的夹持防掉落结构,其特征在于:所述精度转向机构(7)的顶面设置有螺纹连接钉(705),所述精度转向机构(7)的顶面设置有固定连接杆(706)。
7.根据权利要求1所述的一种可滑动式机械手的夹持防掉落结构,其特征在于:所述精度转轴(801)的上方设置有精转螺纹杆(802),所述精度转轴(801)的上方设置有限位短杆(803),所述限位短杆(803)的顶面设置有带孔限位圆块(804),所述精度转轴(801)的外部设置有保护外壳(805),所述精度伸缩结构(8)的顶面开设有固定连接孔(806)。
8.根据权利要求1所述的一种可滑动式机械手的夹持防掉落结构,其特征在于:所述夹持机构(9)包括有伸缩夹持杆(901)和夹持联动轴(902),所述伸缩夹持杆(901)的内部设置有联动齿杆(903)。
技术总结
本发明公开了一种可滑动式机械手的夹持防掉落结构,包括底座,所述底座上方设置固定管,所述固定管上方设置转动支撑杆,所述转动支撑杆一侧设置滑道杆,所述滑道杆一端设置自由活动块,所述自由活动块下方设置有精度转向机构,所述精度转向机构下方设置精度伸缩结构,所述精度伸缩结构包括精度转轴,所述精度伸缩结构下方设置夹持机构。该一种可滑动式机械手的夹持防掉落结构,在进行日常使用的过程中,可通过转动支撑杆来调整夹持机构与夹持物的大致位置,通过设置的精度转向机构和精度伸缩机构可以对夹持机构进行位置上的调整,使夹持机构的夹持杆与夹持物紧密贴合,通过设置的自由活动块可以使夹持机构快速移动,可以使夹持物体快速移动位置。
技术研发人员:徐芳华
受保护的技术使用者:广州善易贸易有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!