一种移动机器人串联被动隔振系统的制作方法
本发明涉及地面移动机器人,具体涉及一种移动机器人串联被动隔振系统。
背景技术:
1、移动机器人现已广泛运用于地面勘探、物流运输等民用领域,并且在地面巡检、反恐防爆等特种领域扮演着重要角色。目前移动机器人不断优化和改进,向着轻量化方向不断演变,拥有更小的结构尺寸、更轻的重量、更低的功耗和更低的成本成为现行研究所追求的。但是对于崎岖路面作业过程中,轮腿复合机器人相比轮式机器人更好的环境适应性,相比足式机器人移动更加灵活,但轮腿机器人在运动过程中依然存在腿部落地时与地面的碰撞,地面的瞬态反作用力会造成机器人本体的晃动,随着运行速度的加快,所带来的冲击与振动加剧,严重影响机器人运行过程中的平顺性,并且会影响机器人内部的传感器等电子元器件工作,所以设法降低机器人在运行的过程中产生的振动、提高运行平顺性是非常有必要的。所以对于减震系统的优化迫在眉睫。
技术实现思路
1、针对现有技术的问题,本发明所解决的技术问题是提供一种结构简单、体积小,易于控制等特点的减震系统,解决移动机器人机器人运行平顺性的问题。
2、本发明所采用的技术方案是一种移动机器人串联被动隔振系统,包括相互配合的支撑用大刚度隔振装置和变形用小刚度隔振装置;所述支撑用大刚度隔振装置包括保持架、横向阻尼橡胶、挡板法兰、第一阻尼器、大刚度金属弹簧,所述的保持架与机器人轮毂连接,所述大刚度金属弹簧与保持架连接,保持架与大刚度金属弹簧一起下压,保持架移动接触第一阻尼器,第一阻尼器形变抵抗垂直反力,所述大刚度金属弹簧置于保持架内部,所述的第一阻尼器套于大刚度金属弹簧底部台面,所述变形用小刚度隔振装置包括第二阻尼器、腿部支杆、挡环、底部橡胶、滚针、小刚度金属弹簧,所述的第二阻尼器在机器人轮毂内部通过外螺纹连接,所述的小刚度金属弹簧一端套于大刚度金属弹簧内套中,另一端套于腿部支杆凸台,腿部支杆继续上压接触第二阻尼器,第二阻尼器形变抵抗向上运动的反力。
3、优选的,所述的保持架与大刚度金属弹簧之间固定横向阻尼橡胶。
4、优选的,所述的大刚度金属弹簧加入螺纹旋转式空腔。
5、优选的,所述的滚针安装于腿部支杆的u型槽与挡板法兰的槽内。
6、一种轮腿式移动机器人,每个轮腿安装权力要求1至4中任意一种移动机器人串联被动隔振系统。
7、优选的,所述的轮腿包括四个,两两对称安装于机器人本体,通过机器人本体内部的直流无刷电机进行驱动,相邻轮腿之间的相位差为60度。
8、本发明的有益效果是:本发明采用了大刚度金属弹簧与小刚度金属弹簧,大刚度金属弹簧可以为隔振系统提供支撑能力、小刚度金属弹簧可以为机器人轮腿提供变形;采用了带有螺纹旋转式空腔的大刚度金属弹簧,螺纹旋转式的空腔为大刚度金属弹簧提供了非线性属性,非线性属性能够帮助隔振结构在高频范围内的振动隔离效果的改进;采用了横向阻尼橡胶,横向阻尼橡胶在大刚度弹簧拉升与压缩的过程中有预压作用,抑制了大刚度弹簧除弹性变形方向外其他作用力的产生;采用了变形用小刚度隔振系统,其中阻尼器1与小刚度金属弹簧位置分布可以改善腿部支杆变形的长度;采用了滚针,通过两个滚针的布置,可以使机器人在运行过程中腿部支杆不沿轴线旋转;采用了被动隔振系统,降低了减震系统的控制难度的同时,降低了隔振系统的复杂程度。
技术特征:
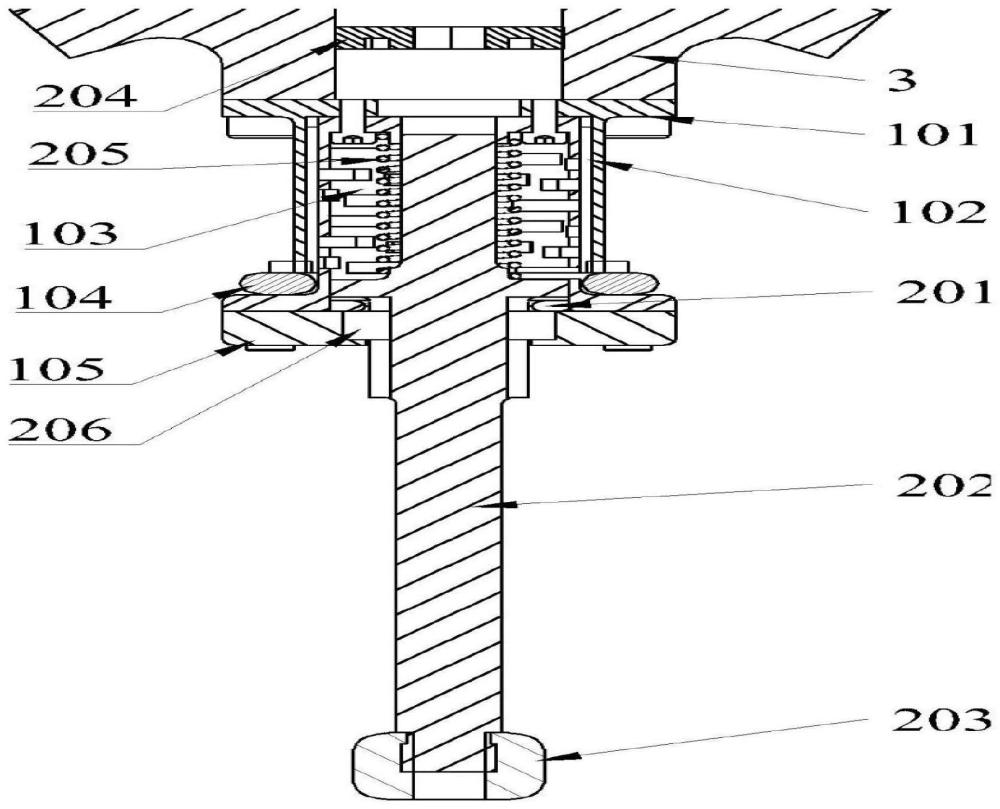
1.一种移动机器人串联被动隔振系统,其特征在于:包括相互配合的支撑用大刚度隔振装置(1)和变形用小刚度隔振装置(2);所述支撑用大刚度隔振装置(1)包括保持架(101)、横向阻尼橡胶(102)、挡板法兰(105)、第一阻尼器(104)、大刚度金属弹簧(103),所述的保持架(101)与机器人轮毂(3)连接,所述大刚度金属弹簧(103)与保持架(101)连接,保持架(101)与大刚度金属弹簧(103)一起下压,保持架(101)移动接触第一阻尼器(104),第一阻尼器(104)形变抵抗垂直反力,所述大刚度金属弹簧(103)置于保持架(101)内部,所述的第一阻尼器(104)套于大刚度金属弹簧(103)底部台面,所述变形用小刚度隔振装置(2)包括第二阻尼器(204)、腿部支杆(202)、挡环(201)、底部橡胶(203)、滚针(206)、小刚度金属弹簧(205),所述的第二阻尼器(204)在机器人轮毂(3)内部通过外螺纹连接,所述的小刚度金属弹簧(205)一端套于大刚度金属弹簧(103)内套中,另一端套于腿部支杆(202)凸台,腿部支杆(202)继续上压接触第二阻尼器(204),第二阻尼器(204)形变抵抗向上运动的反力。
2.根据权利要求1所述的一种移动机器人串联被动隔振系统,其特征在于:所述的保持架(101)与大刚度金属弹簧(103)之间固定横向阻尼橡胶(102)。
3.根据权利要求1所述的一种移动机器人串联被动隔振系统,其特征在于:所述的大刚度金属弹簧(103)加入螺纹旋转式空腔。
4.根据权利要求1所述的一种移动机器人串联被动隔振系统,其特征在于:所述的滚针(206)安装于腿部支杆(202)的u型槽与挡板法兰(105)的槽内。
5.一种轮腿式移动机器人,其特征在于:每个轮腿安装权力要求1至4中任意一种移动机器人串联被动隔振系统。
6.根据权利要求5所述的一种轮腿式移动机器人,其特征在于:所述的轮腿包括四个,两两对称安装于机器人本体,通过机器人本体内部的直流无刷电机进行驱动,相邻轮腿之间的相位差为60度。
技术总结
本发明公开了一种移动机器人串联被动隔振系统,包括支撑用大刚度隔振装置以及变形用小刚度隔振装置。支撑用大刚度隔振装置包含保持架、横向阻尼橡胶、挡板法兰、第一阻尼器、大刚度金属弹簧。变形用小刚度隔振装置包含第二阻尼器、腿部支杆、挡环、底部橡胶、滚针、小刚度金属弹簧。保持架通过螺栓与机器人轮毂连接,第二阻尼器通过外螺纹连接于机器人轮毂内部,小刚度金属弹簧垂直置于大刚度金属弹簧内部,在大刚度金属弹簧内部形成压缩行程。本发明相对过往的移动机器人减震模块增加了一组隔振装置,并且将两个隔振装置串联起来,在不降低隔振频带带宽的同时有效的提高了机器人在运行过程中的支撑能力,相对主动隔振系统质量更轻,控制更加简单。
技术研发人员:邵沛瑶,张永生,马国成,关发财
受保护的技术使用者:沈阳航天新光集团有限公司
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!