一种码垛机器人的工作空间确定方法
本发明属于机械臂领域,具体涉及一种码垛机器人的工作空间确定方法。
背景技术:
1、在机械臂控制器中,有两种运动模式:关节运动和笛卡尔运动。关节运动是机械臂每个关节上电机单独运动,目的是调整某个关节的位置;笛卡尔运动是机械臂各个关节联动,实现机械臂末端在基坐标系下沿x,y,z轴移动,目的是为了调整机械臂末端的位置。在工业生产中控制机械臂完成任务时,经常涉及到以上两种模式交替使用,无论哪种模式,都需要确定机械臂在该种模式下的运动范围,而且需保证在两种模式切换时,运动范围不会变化。同时机械臂末端在抓有货物时,运动范围会与末端没有货物时不同。此外,由于码垛机械臂存在关节之间的约束,使得各个关节运动范围受限于机械结构,在机械臂控制器上确定运动范围时,必须对这种约束进行考虑,否则会对机械臂本体结构造成损害,同时会有安全隐患。为了保护人和设备的安全以及保证生产作业的正常进行,需要确定在关节运动和笛卡尔运动时,关节和末端的运动范围。这种运动范围是机械臂工作空间的一个子集。
2、机械臂的工作空间是指机械臂的末端执行器可以运动的范围。机械臂的工作空间对于机械臂应用场景的选择、路径规划、生产线布局和优化以及作业安全等问题都有参考意义。
3、确定机械臂工作空间的常用方法有三种:第一种是解析法,通过求解工作空间的外部边界包络线的方程,将工作空间用代数方程表示,此种方法需要进行复杂的数学推导,且难以用于工程实践。第二种方法是几何法,通过机器人结构参数,将机器人工作空间的截面绘制出来,此种方法不适用于结构复杂的机器人。第三种方法是数值法,利用计算机的计算能力,将机械臂的关节角度利用机械臂运动学正解映射到机械臂末端的位置,当取的关节角度足够多时,对应机械臂末端的坐标值就能很好地反映机械臂工作空间的形状,该种方法需要较高的计算资源,所求得的工作空间的精度取决于所选关节角度的数量。
4、目前的工作空间求解方法,少有考虑机械臂存在机械约束的情况,这种情况下,各关节之间的运动不是独立的。同时,现有计算方法比如数值法,不利于在计算资源有限的情况下进行工程实现。最后,目前大多数工作空间求解集中于末端没有夹持物体的情况。
技术实现思路
1、本发明的目的在于提供一种码垛机器人的工作空间确定方法,提出了关节运动和笛卡尔运动时,机械臂末端运动范围的计算方法,对于同一构型的码垛机械臂,给出关节角度和臂长,便可计算出相应的关节和末端的运动范围,该方法计算简单且省时,易于编程实现,同时考虑了机械结构的约束,保证了人和设备的安全。然后计算了末端夹持有货物的情况下而引起的运动范围的变化。最后,基于求解出的运动范围,计算末端在某一高度下的两个同心圆组成的圆环,用该圆环和机械臂第一关节确定的锥形区域取交集,然后遍历所有的高度,获得整个机械臂的工作空间。
2、为实现上述目的,本发明所采取的技术方案为:
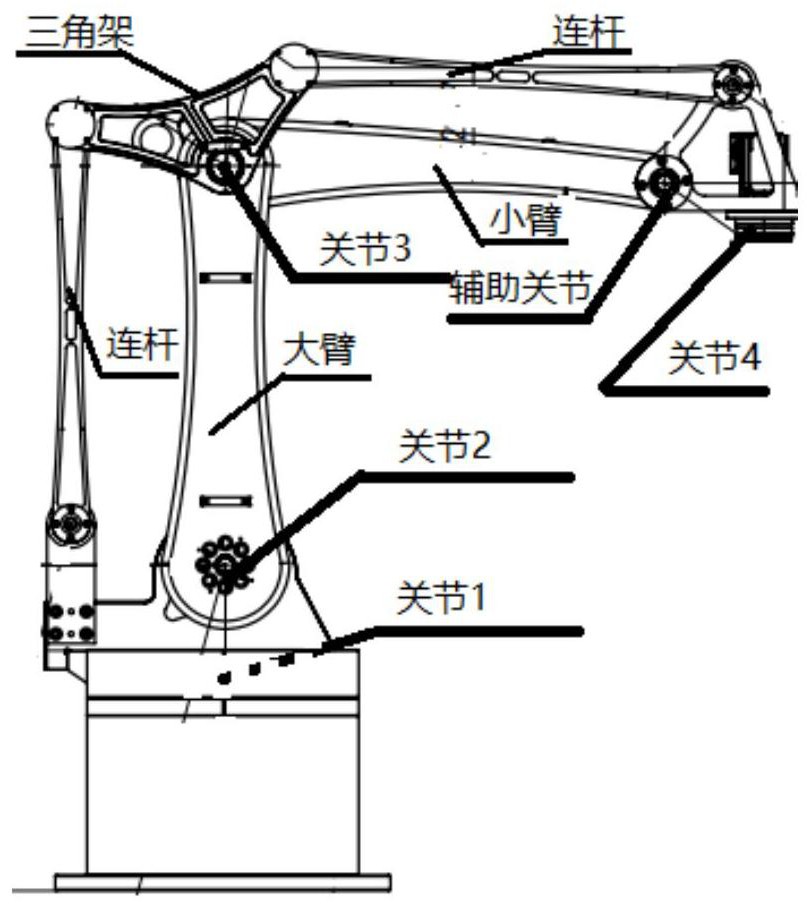
3、一种码垛机器人的工作空间确定方法,所述码垛机器人具有五个旋转自由度,第一关节、第二关节、第三关节和第四关节各提供一个旋转自由度,辅助关节提供一个旋转自由度用于保持第四关节轴线始终垂直于地面,第三关节处安装一个三角架连接两个连杆并且与大臂和小臂形成两个局部闭链,所述码垛机器人的工作空间确定方法,包括:
4、建立关节的坐标系以及确定无约束下各关节的最小角度和最大角度;
5、当运动方式为关节运动方式时,逐一确定在几何关系和机械约束下各关节的运动范围作为机械臂的工作空间;
6、当运动方式为笛卡尔运动方式时,先确定机械臂末端在第一关节坐标系下的运动范围,然后将在第一关节坐标系下的运动范围转换为基座坐标系下的运动范围,根据机械臂末端在基座坐标系下的运动范围生成机械臂的工作空间,所述机械臂末端为第四关节轴线上的一点,所述第一关节设置在基座上。
7、本发明对于一种构型的码垛机械臂,在考虑机械结构约束的情况下,提出了一种运动范围和工作空间计算方法。只要是符合该构型的码垛机械臂,只需给定臂长和关节角度上下限,便可计算出关节模式和笛卡尔模式下,机械臂的运动范围,同时保证了在这两种模式切换时,工作空间的一致性,即不会出现从某一模式切换到另一模式后,从原来的属于工作空间变为不属于工作空间的情况。进一步,结合求解出的运动范围,本发明采用分层拼接的方法得到机械臂的工作空间,即用平行于x-y平面的两个同心圆确定某一高度z下的运动边界,再与机械臂第一关节确定的锥形区域取交集,然后遍历所有可能的高度,得到整个工作空间。最后,对于本发明提出的方法进行了改进,得到了在末端夹持有货物的情况下机械臂的运动范围以及工作空间。本方法计算简单且省时,易于编程实现。
技术特征:
1.一种码垛机器人的工作空间确定方法,所述码垛机器人具有五个旋转自由度,第一关节、第二关节、第三关节和第四关节各提供一个旋转自由度,辅助关节提供一个旋转自由度用于保持第四关节轴线始终垂直于地面,第三关节处安装一个三角架连接两个连杆并且与大臂和小臂形成两个局部闭链,其特征在于,所述码垛机器人的工作空间确定方法,包括:
2.根据权利要求1所述的码垛机器人的工作空间确定方法,其特征在于,所述建立关节的坐标系,包括:
3.根据权利要求2所述的码垛机器人的工作空间确定方法,其特征在于,所述确定无约束下各关节的最小角度和最大角度,包括:
4.根据权利要求3所述的码垛机器人的工作空间确定方法,其特征在于,当运动方式为关节运动方式时,逐一确定在几何关系和机械约束下各关节的运动范围作为码垛机器人的工作空间,包括:
5.根据权利要求3所述的码垛机器人的工作空间确定方法,其特征在于,所述当运动方式为笛卡尔运动方式时,先确定机械臂末端在第一关节坐标系下的运动范围,包括:
6.根据权利要求5所述的码垛机器人的工作空间确定方法,其特征在于,所述将在第一关节坐标系下的运动范围转换为基座坐标系下的运动范围,包括:
7.根据权利要求6所述的码垛机器人的工作空间确定方法,其特征在于,所述根据基座坐标系下的运动范围生成码垛机器人的工作空间,包括:
8.根据权利要求4所述的码垛机器人的工作空间确定方法,其特征在于,当机械臂末端夹有货物时,取一个可以容纳货物的直径为w,的球,其截面为一个圆,在圆上均匀的取m个点,则在第一关节坐标系frame1坐标系x1-z1平面下这m个点的坐标为:
9.根据权利要求7所述的码垛机器人的工作空间确定方法,其特征在于,当机械臂末端夹有货物时,取一个可以容纳货物的直径为w,的球,其截面为一个圆,在圆上均匀的取m个点,则在第一关节坐标系frame1坐标系x1-z1平面下这m个点的坐标为:
技术总结
本发明属于机械臂领域,公开了一种码垛机器人的工作空间确定方法,提出了关节运动和笛卡尔运动时,机械臂末端运动范围的计算方法,对于同一构型的码垛机械臂,给出关节角度和臂长,便可计算出相应的关节和末端的运动范围,该方法计算简单且省时,易于编程实现,同时考虑了机械结构的约束,保证了人和设备的安全。然后计算了末端夹持有货物的情况下而引起的运动范围的变化。最后,基于求解出的运动范围,计算末端在某一高度下的两个同心圆组成的圆环,用该圆环和机械臂第一关节确定的锥形区域取交集,然后遍历所有的高度,获得整个码垛机器人的工作空间。
技术研发人员:董辉,孙慧君,吴祥,黄光普,林文杰,张丹,吴旻诚,陈积明
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!