一种遥控救援机器人的灵活机械臂结构
本发明涉及救援机器人,具体涉及一种遥控救援机器人的灵活机械臂结构。
背景技术:
1、遥控救援机器人是一种辅助救援设备,遥控救援机器人在使用时,通过机械臂上的识别镜头对救援现场的状况进行实时掌控,为提高遥控救援机器人救援过程中的便捷性,遥控救援机器人上设置有机械臂并通过机械臂的驱动实现不同的救援动作,而机械臂及识别镜头在操作使用时,由于机械臂救援过程中高频率的转向摆动,机械臂活动关节处常发生润滑不足,影响机械臂救援的效果,且遥控救援机器人上的识别镜头直接安装在遥控救援机器人的外侧,增大识别镜头发生损坏的几率,为此,本发明提出一种遥控救援机器人的灵活机械臂结构。
技术实现思路
1、本发明的目的是提供一种遥控救援机器人的灵活机械臂结构,保证机械臂本体在高频转向摆动的要求下仍然能够有效的驱动操作,保证遥控救援机器的救援使用效果。
2、本发明所采用的技术方案是:
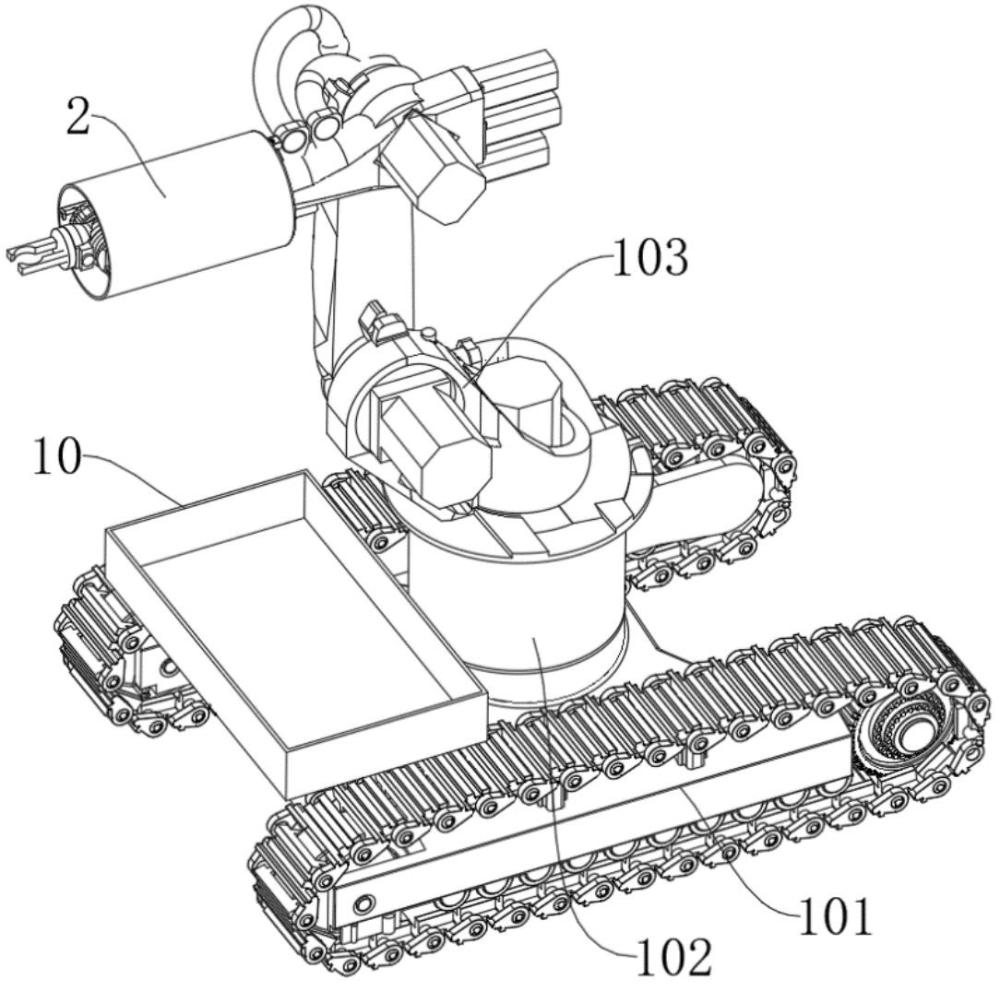
3、一种遥控救援机器人的灵活机械臂结构,包括可移动的安装座、设置于安装座上的机械臂本体、设置于机械臂本体的驱动端上用于救援现场状况识别的识别镜头和套设于机械臂本体驱动端的防护套,防护套的内部设置有安装板和驱动组件,安装板与驱动组件连接,识别镜头设置于安装板上,安装板上还设有润滑组件,驱动组件带动安装板沿防护套轴线方向来回移动。
4、优选地,驱动组件设置于防护套上,驱动组件包括固定在防护套内部的第一固定块、通过第一固定块设置于防护套内壁上的丝杆和第二电机,第二电机与丝杆的一端连接,丝杆沿防护套的轴线方向布置,安装板通过螺纹与丝杆连接。
5、优选地,安装板为环形结构,记为安装环,安装环套设于机械臂的驱动端和防护罩之间;
6、防护罩内还设有第一导向组件,第一导向组件包括第二固定块和导杆,导杆沿防护罩的轴线方向布置,导杆从安装环上穿过,驱动组件带动安装环沿导杆来回移动。
7、优选地,润滑组件包括操作箱、活塞板和升降组件,活塞板设置于操作箱内腔,操作箱底部设有出料管,升降组件与活塞板连接,带动活塞板上下移动,挤压操作箱内的润滑液使其从底部出料管出来,对机械臂本体活动关节进行润滑。
8、优选地,操作箱内腔还连接有供料组件,供料组件包括存料箱和输送管,存料箱通过输送管与操作箱连通;
9、输送管内设有第一单向阀,出料管内设有第二单向阀。
10、优选地,升降组件包括固定在操作箱外侧的第一安装块和固定于活塞板外侧的第二安装块,第一安装块和第二安装块上分别设置有第一电机和螺纹管,第一电机与螺纹管之间连接有螺纹杆,螺纹杆的一端与第一电机的输出端连接,螺纹杆的另一端与螺纹管套接。
11、优选地,升降组件设置于活塞板的一侧,活塞板的另一侧设有第二导向组件,第二导向组件包括第二滑杆、第二套管、设置于操作箱上的第三安装块和设置于活塞板上的第四安装块,第二滑杆和第二套管分别设置于第四安装块和第三安装块上,第二滑杆与第二套管套接。
12、优选地,安装座的上端固定有固定台,固定台的上方设置有救援箱,固定台与救援箱之间设置有缓冲支撑组件。
13、优选地,固定台与救援箱之间设置有多组缓冲支撑组件,缓冲支撑组件包括套筒、传动杆、阻尼板和连接弹簧,套筒内腔设有阻尼板,套筒内腔设有阻尼液,阻尼板和套筒底部之间还设有连接弹簧,传动杆的一端与阻尼板连接,套筒的一端和传动杆的另一端分别与救援箱和固定台连接。
14、优选地,安装座底部设有履带底盘或移动轮。
15、本发明的有益效果是:
16、本发明的机械臂本体与识别镜头在使用时,既能通过传动,对识别镜头进行有效的遮挡防护,也能通过传动,将输送管及操作箱内部的润滑液经过挤压从出料管落至机械臂本体活动关节上,对机械臂本体活动关节进行润滑,保证机械臂本体在高频转向摆动的要求下仍然能够有效的驱动操作,保证遥控救援机器的救援使用效果。
技术特征:
1.一种遥控救援机器人的灵活机械臂结构,其特征在于:包括可移动的安装座(102)、设置于安装座(102)上的机械臂本体(103)、设置于机械臂本体(103)的驱动端上用于救援现场状况识别的识别镜头(104)和套设于机械臂本体(103)驱动端的防护套(2),防护套(2)的内部设置有安装板和驱动组件,安装板与驱动组件连接,识别镜头(104)设置于安装板上,安装板上还设有润滑组件,驱动组件带动安装板沿防护套(2)轴线方向来回移动。
2.如权利要求1所述的遥控救援机器人的灵活机械臂结构,其特征在于:驱动组件设置于防护套上,驱动组件包括固定在防护套(2)内部的第一固定块(401)、通过第一固定块(401)设置于防护套(2)内壁上的丝杆(402)和第二电机(403),第二电机(403)与丝杆(402)的一端连接,丝杆(402)沿防护套(2)的轴线方向布置,安装板通过螺纹与丝杆连接。
3.如权利要求2所述的遥控救援机器人的灵活机械臂结构,其特征在于:安装板为环形结构,记为安装环(3),安装环(3)套设于机械臂本体(103)的驱动端和防护罩(2)之间;
4.如权利要求1~3任意一个所述的遥控救援机器人的灵活机械臂结构,其特征在于:润滑组件包括操作箱(501)、活塞板(502)和升降组件,活塞板(502)设置于操作箱(501)内腔,操作箱(501)底部设有出料管(503),升降组件与活塞板(502)连接,带动活塞板(502)上下移动,挤压操作箱(501)内的润滑液使其从底部出料管(503)出来,对机械臂本体(103)活动关节进行润滑。
5.如权利要求4所述的遥控救援机器人的灵活机械臂结构,其特征在于:操作箱(501)内腔还连接有供料组件,供料组件包括存料箱(601)和输送管(602),存料箱(601)通过输送管(602)与操作箱(501)连通;
6.如权利要求4所述的遥控救援机器人的灵活机械臂结构,其特征在于:升降组件包括固定在操作箱(501)外侧的第一安装块(801)和固定于活塞板(502)外侧的第二安装块(802),第一安装块(801)和第二安装块(802)上分别设置有第一电机(805)和螺纹管(804),第一电机(805)与螺纹管(804)之间连接有螺纹杆(803),螺纹杆(803)的一端与第一电机(805)的输出端连接,螺纹杆(803)的另一端与螺纹管(804)套接。
7.如权利要求6所述的遥控救援机器人的灵活机械臂结构,其特征在于:升降组件设置于活塞板的一侧,活塞板的另一侧设有第二导向组件,第二导向组件包括第二滑杆(903)、第二套管(904)、设置于操作箱(501)上的第三安装块(901)和设置于活塞板(502)上的第四安装块(902),第二滑杆(903)和第二套管(904)分别设置于第四安装块(902)和第三安装块(901)上,第二滑杆(903)与第二套管(904)套接。
8.如权利要求1所述的遥控救援机器人的灵活机械臂结构,其特征在于:安装座(102)的上端固定有固定台(11),固定台(11)的上方设置有救援箱(10),固定台(11)与救援箱(10)之间设置有缓冲支撑组件。
9.如权利要求8所述的遥控救援机器人的灵活机械臂结构,其特征在于:固定台(11)与救援箱(10)之间设置有多组缓冲支撑组件,缓冲支撑组件包括套筒(1201)、传动杆(1202)、阻尼板(1203)和连接弹簧(1204),套筒(1201)内腔设有阻尼板(1203),套筒(1201)内腔设有阻尼液,阻尼板(1203)和套筒底部之间还设有连接弹簧(1204),传动杆(1202)的一端与阻尼板(1203)连接,套筒(1201)的一端和传动杆(1202)的另一端分别与救援箱(10)和固定台(11)连接。
10.如权利要求1所述的遥控救援机器人的灵活机械臂结构,其特征在于:安装座(102)底部设有履带底盘(101)或移动轮。
技术总结
本发明公开了一种遥控救援机器人的灵活机械臂结构,包括可移动的安装座、设置于安装座上的机械臂本体、设置于机械臂本体的驱动端上用于救援现场状况识别的识别镜头和套设于机械臂本体驱动端的防护套,防护套的内部设置有安装板和驱动组件,安装板与驱动组件连接,识别镜头设置于安装板上,安装板上还设有润滑组件,驱动组件带动安装板沿防护套轴线方向来回移动。本发明能保证机械臂本体在高频转向摆动的要求下仍然能够有效的驱动操作,保证遥控救援机器的救援使用效果。
技术研发人员:张本,武月通,张伟业,吴相宸,陈昭文
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!