一种基于动作基元的拟人运动规划方法、装置及介质与流程
本发明属于冗余机械臂运动规划,尤其涉及一种基于动作基元的拟人运动规划方法、装置及介质。
背景技术:
1、随着经济水平与科技水平的提升,机器人与人类的交互场景越来越多。拟人化(hri)是指将人类特性赋予非人个体,实现机器人拟人化运动能够带给人类更加逼真与舒适的交互体验。拟人臂作为交互型机器人执行复杂任务的关键零部件,与人类的交互最为密切。为了保证交互过程的高效和安全,提高其智能水平和拟人运动能力是亟需解决的重要问题。拟人运动规划是机器人产生拟人化运动的核心技术。
2、目前,基于性能指标和基于人臂运动复现的拟人运动规划方法存在求解困难、指标种类繁杂以及针对不同任务泛用性差等诸多缺点。因而为了弥补传统拟人运动规划方法的诸多缺陷,减少数据量的同时提高机器人对任务的适应能力,设计一种计算简单且能较好适应不同难度任务的冗余机械臂拟人运动规划方法具有迫切的需求与重大的意义。
技术实现思路
1、本发明所要解决的技术问题是针对上述现有技术的不足,提供一种基于动作基元的拟人运动规划方法、装置及介质。
2、为实现上述技术目的,本发明采取的技术方案为:一种基于动作基元的拟人运动规划方法,包括以下步骤:
3、(1)对待执行的任务进行子任务划分,并根据任务需求规划出所述子任务的执行顺序;
4、(2)捕捉执行各个子任务时人臂的运动数据,并通过对各个任务下的动作基元提取与拟合量化,构建各个子任务的动作基元库;
5、(3)将各个子任务的动作基元库作为载体将人臂的运动技巧转移到拟人臂上。
6、进一步地,所述捕捉执行各个子任务时的人臂运动数据具体为:采用动作捕捉设备获得人臂在执行各子任务时的连续时刻的运动数据;
7、所述动作捕捉设备采用传感器来感知人体的运动。
8、进一步地,所述动作基元提取具体为:
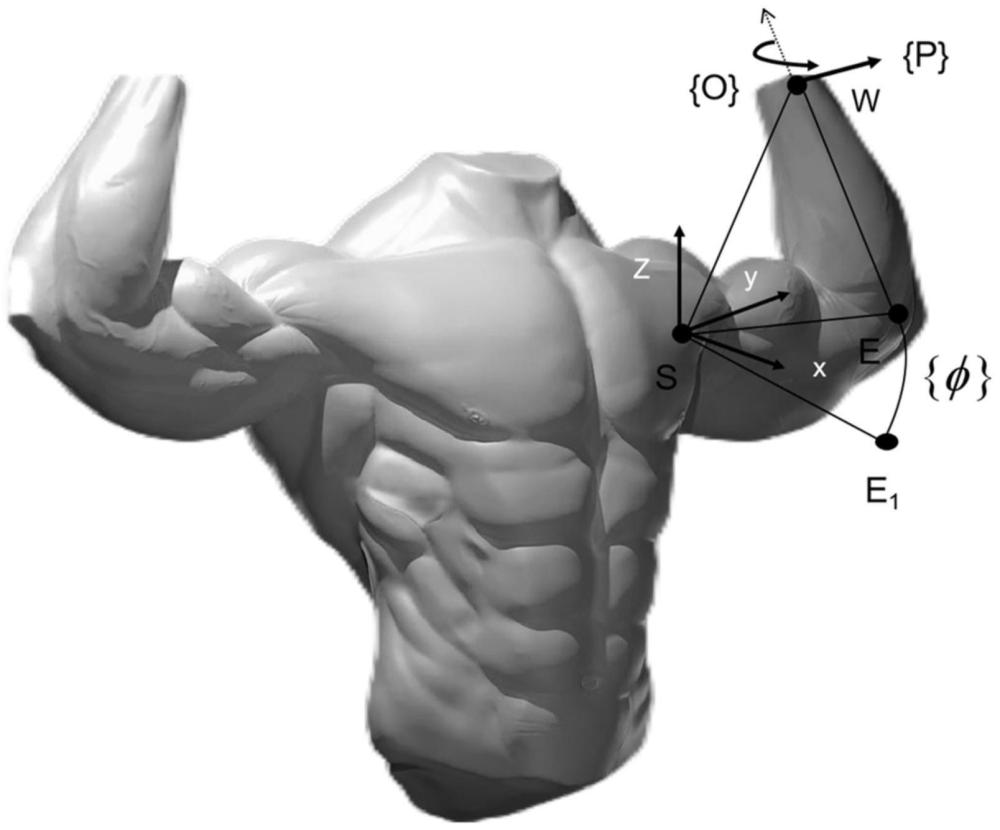
9、(2.1)通过所述人臂的运动数据,计算每一帧运动的位置p(t)、姿态o(t)以及肘部旋转角
10、(2.2)对于每一帧运动的位置p(t)、姿态o(t)以及肘部旋转角采用滤波算法进行平滑处理;
11、(2.3)通过判断人手速度的值来筛选出有效运动片段;若速度非零,则为有效运动;
12、(2.4)识别每一帧有效运动的动作基元,所述动作基元包括位置变化率、姿态变化率和肘部旋转角变化率;
13、(2.5)合并相邻帧数且类型一致的动作基元,得到整个有效运动片段的全部动作基元;
14、所述类型一致的动作基元是指动作基元所包含的元素一致;所述元素包括位置变化率、姿态变化率和肘部旋转角变化率。
15、进一步地,所述肘部旋转角为参考平面与手臂平面之间的夹角,其中手臂平面由大臂和小臂构成,参考平面为拟人化串联机械臂的关节2轴线与关节4轴线平行时两轴构成的平面;
16、所述肘部旋转角的计算方法为:
17、
18、其中,表示的是肩部到肘部形成的向量;表示的是肩部到腕部形成的向量;表示的是肘部到腕部形成的向量。
19、进一步地,针对待执行的任务,通过所需采集数据的人体部位的传感器,获得bvh数据即运动数据;所述bvh数据包含人体的骨骼和肢体关节的旋转数据;通过bvh数据中骨骼树的逻辑链来计算右/左手在肩部坐标系下的位置和姿态,即齐次变换矩阵:
20、
21、其中,和分别代表各身理节点在肩部坐标系,即基座标系中的姿态和位置;其中i为手部坐标系到肩部坐标系之间的身理节点的个数,其经历了手部、前臂、大臂以及肩部4个身理节点,因此i的值为4;j表示的是当前身理节点。
22、进一步地,采用优化后的傅里叶级数函数对有效运动片段中的动作基元进行拟合量化并建立与子任务相对应的动作基元库;
23、所述优化后的傅里叶级数函数为:
24、
25、
26、
27、
28、其中,an、bn与a0均为傅里叶级数的系数;n表示的是傅里叶级数展开的次数;表示转速;t=tmax-tmin为被拟合函数f(t)的周期。
29、进一步地,所述步骤(3)包括以下子步骤:
30、(3.1)将人臂动作基元的各个元素转变为描述人臂运动的状态量,即人臂末端位置、人臂末端姿态与肘部旋转角;
31、(3.2)根据所述运动的状态量求解出人臂或者是冗余机械臂的各身理节点相对于肩部坐标系的空间位置,所述身理节点包括手臂末端、腕部节点与肘部节点;
32、(3.3)基于所述身理节点的空间位置,解析出冗余机械臂的运动关节角如下:
33、
34、其中分别为位置变化率、姿态变化率以及肘部旋转角变化率,m代表关节,按照数字顺序m依次表示基座、肩部1、肩部2、肘部1、肘部2、肘部3、腕部。
35、进一步地,所述将人臂动作基元的各个元素转变为描述人臂运动的状态量具体为:
36、
37、
38、
39、其中,p(t)、o(t)、分别为人臂末端位置、人臂末端姿态以及肘部旋转角;p0为人臂末端初始位置,o0为人臂末端初始姿态角,为初始肘部旋转角。
40、本发明还提供了一种基于动作基元的拟人运动规划装置,包括一个或多个处理器,用于实现上述的基于动作基元的拟人运动规划方法。
41、本发明还提供了一种计算机可读存储介质,其上存储有程序,该程序被处理器执行时,用于实现上述的基于动作基元的拟人运动规划方法。
42、本发明具有以下有益效果:本发明提供了一种计算简单且能较好适应不同难度任务的冗余机械臂拟人运动规划方法,且采用优化后的傅里叶级数函数对基本动作基元进行拟合量化并建立与子任务相对应的动作基元库,在减少数据量的同时保证拟合精度;以单臂达点运动为例,基于动作基元的拟人运动规划方法是一种对于达点运动任务进行分析,形成针对单臂达点运动的动作基元库并将其映射成拟人臂的关节角,从而完成冗余机械臂拟人化运动的方法。本发明能够极大的减少数据量的同时提高机器人对任务的适应能力。
技术特征:
1.一种基于动作基元的拟人运动规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述捕捉执行各个子任务时的人臂运动数据具体为:采用动作捕捉设备获得人臂在执行各子任务时的连续时刻的运动数据;
3.根据权利要求1所述的方法,其特征在于,所述动作基元提取具体为:
4.根据权利要求3所述的方法,其特征在于,所述肘部旋转角为参考平面与手臂平面之间的夹角,其中手臂平面由大臂和小臂构成,参考平面为拟人化串联机械臂的关节2轴线与关节4轴线平行时两轴构成的平面;
5.根据权利要求3所述的方法,其特征在于,针对待执行的任务,通过所需采集数据的人体部位的传感器,获得bvh数据即运动数据;所述bvh数据包含人体的骨骼和肢体关节的旋转数据;通过bvh数据中骨骼树的逻辑链来计算右/左手在肩部坐标系下的位置和姿态,即齐次变换矩阵:
6.根据权利要求3所述的方法,其特征在于,采用优化后的傅里叶级数函数对有效运动片段中的动作基元进行拟合量化并建立与子任务相对应的动作基元库;
7.根据权利要求1所述的方法,其特征在于,所述步骤(3)包括以下子步骤:
8.根据权利要求7所述的方法,其特征在于,所述将人臂动作基元的各个元素转变为描述人臂运动的状态量具体为:
9.一种基于动作基元的拟人运动规划装置,其特征在于,包括一个或多个处理器,用于实现权利要求1-8中任一项所述的基于动作基元的拟人运动规划方法。
10.一种计算机可读存储介质,其上存储有程序,其特征在于,该程序被处理器执行时,用于实现权利要求1-8中任一项所述的基于动作基元的拟人运动规划方法。
技术总结
本发明公开了一种基于动作基元的拟人运动规划方法、装置及介质,包括:对待执行的任务进行子任务划分,并根据任务需求规划出所述子任务的执行顺序;捕捉执行各个子任务时人臂的运动数据,并通过对各个任务下的动作基元提取与拟合量化,构建各个子任务的动作基元库;将各个子任务的动作基元库作为载体将人臂的运动技巧转移到拟人臂上,实现冗余机械臂的拟人运动规划。本发明能够极大的减少数据量的同时提高机器人对任务的适应能力。
技术研发人员:宛敏红,段晋军,黄秋兰,孙伟栋,宾一鸣,王灵禺
受保护的技术使用者:之江实验室
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!