一种变电站巡检机器人远程控制方法及系统与流程
本发明涉及数据处理领域,尤其涉及一种变电站巡检机器人远程控制方法及系统。
背景技术:
1、巡检机器人是基于图像识别以及位置定位的巡检设备,模拟人工对变电站进行巡检。然而,在现有技术中变电站巡检机器人对于定位的精准度需求较高,由于通信干扰以及定位失效等因素,导致巡检机器人位置丢失,进而造成巡检迷航,进而影响巡检进度。
2、因此,在现有技术中变电站巡检机器人由于通信干扰以及定位失效,导致巡检机器人位置丢失,造成机器人巡检迷航的技术问题。
技术实现思路
1、本申请通过提供一种变电站巡检机器人远程控制方法及系统,解决了在现有技术中变电站巡检机器人由于通信干扰以及定位失效,导致巡检机器人位置丢失,造成机器人巡检迷航的技术问题。
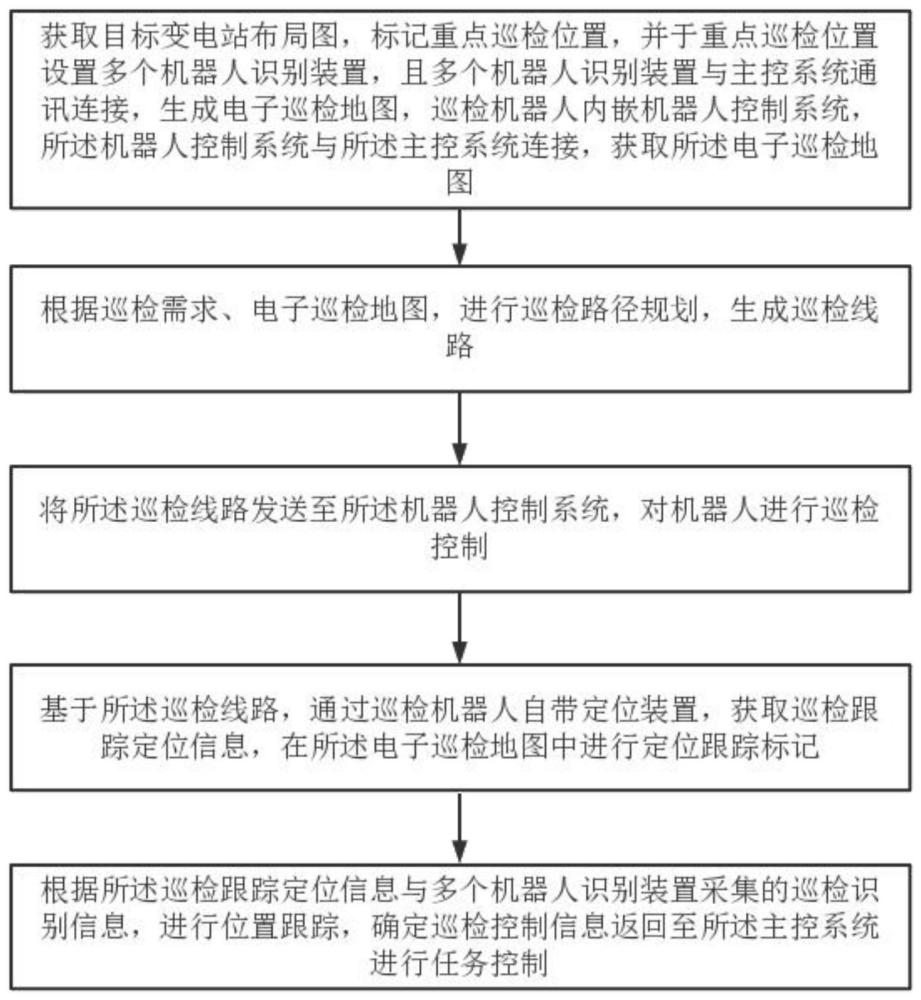
2、本申请提供一种变电站巡检机器人远程控制方法,包括:获取目标变电站布局图,标记重点巡检位置,并于重点巡检位置设置多个机器人识别装置,且多个机器人识别装置与主控系统通讯连接,生成电子巡检地图;巡检机器人内嵌机器人控制系统,所述机器人控制系统与所述主控系统连接,获取所述电子巡检地图;根据巡检需求、电子巡检地图,进行巡检路径规划,生成巡检线路;将所述巡检线路发送至所述机器人控制系统,对机器人进行巡检控制;基于所述巡检线路,通过巡检机器人自带定位装置,获取巡检跟踪定位信息,在所述电子巡检地图中进行定位跟踪标记;根据所述巡检跟踪定位信息与多个机器人识别装置采集的巡检识别信息,进行位置跟踪,确定巡检控制信息返回至所述主控系统进行任务控制。
3、本申请还提供了一种变电站巡检机器人远程控制系统,包括:巡检地图获取模块,用于获取目标变电站布局图,标记重点巡检位置,并于重点巡检位置设置多个机器人识别装置,且多个机器人识别装置与主控系统通讯连接,生成电子巡检地图;巡检机器人内嵌机器人控制系统,所述机器人控制系统与所述主控系统连接,获取所述电子巡检地图;巡检线路获取模块,用于根据巡检需求、电子巡检地图,进行巡检路径规划,生成巡检线路;巡检控制模块,用于将所述巡检线路发送至所述机器人控制系统,对机器人进行巡检控制;跟踪标记模块,用于基于所述巡检线路,通过巡检机器人自带定位装置,获取巡检跟踪定位信息,在所述电子巡检地图中进行定位跟踪标记;任务控制模块,用于根据所述巡检跟踪定位信息与多个机器人识别装置采集的巡检识别信息,进行位置跟踪,确定巡检控制信息返回至所述主控系统进行任务控制。
4、本申请还提供了一种电子设备,包括:
5、存储器,用于存储可执行指令;
6、处理器,用于执行所述存储器中存储的可执行指令时,实现本申请提供的一种变电站巡检机器人远程控制方法。
7、本申请提供一种计算机可读存储介质,存储有计算机程序,该程序被处理器执行时,实现本申请提供的一种变电站巡检机器人远程控制方法。
8、拟通过本申请提出的一种变电站巡检机器人远程控制方法及系统,通过获取目标变电站布局图,标记重点巡检位置,并设置多个机器人识别装置,生成电子巡检地图。根据巡检需求、电子巡检地图,进行巡检路径规划,生成巡检线路。基于巡检线路对机器人进行巡检控制。基于巡检线路,通过巡检机器人自带定位装置,获取巡检跟踪定位信息,在电子巡检地图中进行定位跟踪标记。根据巡检跟踪定位信息与多个机器人识别装置采集的巡检识别信息,进行位置跟踪,确定巡检控制信息返回至主控系统进行任务控制。通过多个巡检机器人进行位置的互相定位以及获取,减少了变电站巡检机器人由于通信干扰以及定位失效,导致的巡检机器人位置丢失情况的发生,降低了机器人巡检迷航的风险。解决了现有技术中变电站巡检机器人由于通信干扰以及定位失效,导致巡检机器人位置丢失,造成机器人巡检迷航的技术问题。
9、上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,而可依照说明书的内容予以实施,并且为了让本申请的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种变电站巡检机器人远程控制方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述基于所述巡检线路,通过巡检机器人自带定位装置,获取巡检跟踪定位信息,包括:
3.如权利要求2所述的方法,其特征在于,所述对途径巡检机器人进行图像识别定位,获取协同巡检识别信息,包括:
4.如权利要求3所述的方法,其特征在于,将所述协同巡检识别信息与实时定位进行对齐融合,获得所述巡检跟踪定位信息,包括:
5.如权利要求1所述的方法,其特征在于,根据所述巡检跟踪定位信息与多个机器人识别装置采集的巡检识别信息,进行位置跟踪,包括:
6.如权利要求5所述的方法,其特征在于,基于所述电子巡检地图中的识别标记、定位标记,构建定位跟踪交叉网进行定位验证跟踪,确定各巡检机器人的定位信息,包括:
7.如权利要求6所述的方法,其特征在于,还包括:
8.如权利要求1所述的方法,其特征在于,还包括:
9.一种变电站巡检机器人远程控制系统,其特征在于,包括:
10.一种电子设备,其特征在于,所述电子设备包括:
技术总结
本发明公开了一种变电站巡检机器人远程控制方法及系统,应用于数据处理技术领域,该方法包括:通过获取目标变电站布局图,标记重点巡检位置,并设置多个机器人识别装置,生成电子巡检地图。根据巡检需求、电子巡检地图,进行巡检路径规划,生成巡检线路。基于巡检线路对机器人进行巡检控制。基于巡检线路,通过巡检机器人自带定位装置,获取巡检跟踪定位信息,在电子巡检地图中进行定位跟踪标记。根据巡检跟踪定位信息与多个机器人识别装置采集的巡检识别信息,进行位置跟踪,确定巡检控制信息返回至主控系统进行任务控制。解决了现有技术中变电站巡检机器人由于通信干扰以及定位失效,导致巡检机器人位置丢失,造成机器人巡检迷航的技术问题。
技术研发人员:马传飞,王丽峰,高海龙,郭胤,滕松,张传驰,张潇
受保护的技术使用者:国网江苏省电力有限公司徐州供电分公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!