基于知识库的机器人控制方法及系统与流程
本发明涉及电网的智能管理,具体地涉及一种基于知识库的机器人控制方法及系统。
背景技术:
1、电网机器人流程化巡检技术是近年来电网系统中比较火热的核心话题,其旨在通过巡检机器人对电网系统的现场(例如变电站)进行自动化巡检,从而提高整体的巡检与运维效率。现有技术中常用于对机器人进行控制巡检的方法主要是针对如何对设备的细节进行巡检,缺乏整体的调度优化,使得机器人无法保证整体工作时间的协调性,从而会拉长整体的巡检时间,这显然会制约巡检的效率。
技术实现思路
1、本发明实施例的目的是提供一种基于知识库的机器人控制方法及系统,该控制方法及系统能够提高电网机器人的巡检效率。
2、为了实现上述目的,本发明实施例提供一种基于知识库的机器人控制方法,包括:
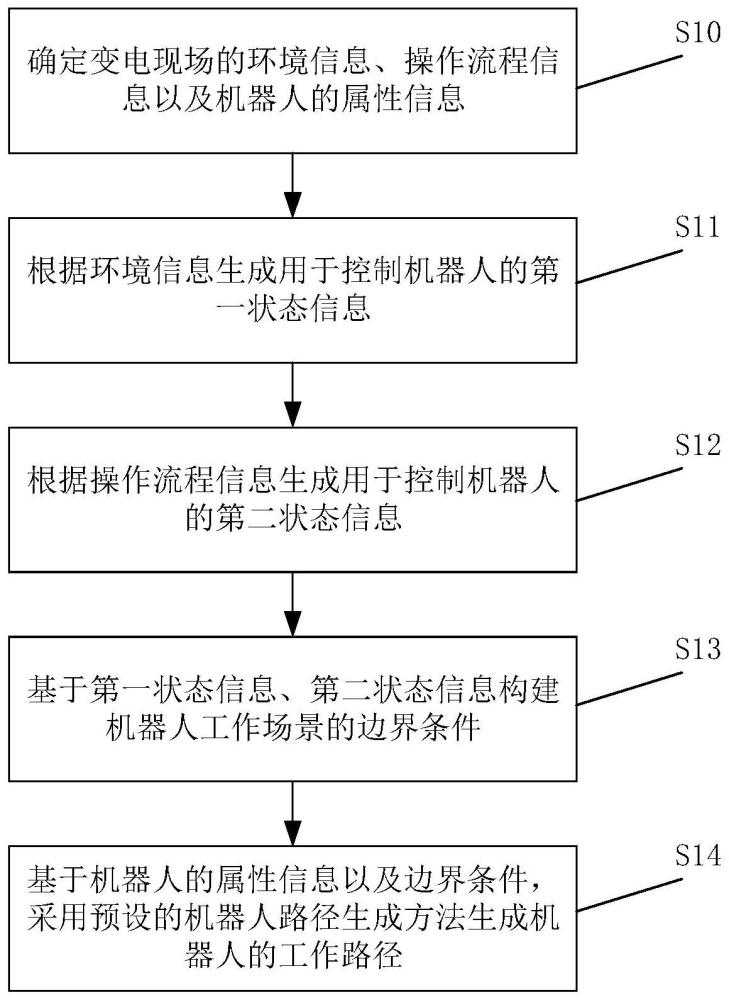
3、确定变电现场的环境信息、操作流程信息以及机器人的属性信息;
4、根据所述环境信息生成用于控制机器人的第一状态信息;
5、根据所述操作流程信息生成用于控制机器人的第二状态信息;
6、基于所述第一状态信息、第二状态信息构建机器人工作场景的边界条件;
7、基于机器人的属性信息以及所述边界条件,采用预设的机器人路径生成方法生成所述机器人的工作路径。
8、可选地,所述变电现场的环境信息包括多个巡检的巡检点位和路径细节,每个巡检点位对应有巡检内容和点位位置,每个路径细节包括每条路径的位置以及路径的类型。
9、可选地,所述操作流程信息包括每个巡检点位的巡检次序以及综合巡检难度。
10、可选地,基于机器人的属性信息以及所述边界条件,采用预设的机器人路径生成方法生成所述机器人的工作路径,包括:
11、根据所述边界条件随机生成用于表示每个机器人路径的个体;
12、根据所述个体计算当前的控制协调度;
13、判断所述控制协调度是否小于或等于预设的协调度阈值;
14、在判断所述控制协调度小于或等于所述协调度阈值的情况下,输出所述个体,以生成控制每个机器人巡检的工作路径;
15、在判断所述控制协调度大于所述协调度阈值的情况下,采用预设的路径更新方法更新所述个体,并返回执行根据所述个体计算当前的控制协调度的步骤。
16、可选地,根据所述个体计算当前的控制协调度,包括:
17、根据公式(1)计算所述控制协调度,
18、
19、其中,ba为所述控制协调度,ti+1为第i+1个个体的累计工作时间,ti为第i个个体的累计工作时间,n为所述个体的数量,δt为标准化时间单位。
20、可选地,所述路径更新方法包括:
21、计算每个所述个体的工作时间;
22、选择所述工作时间最长的所述个体作为第一个体;
23、从所述第一个体中选择一个巡检点位;
24、按照所述工作时间从小到大的顺序选择一个未被选择的个体作为第二个体;
25、根据所述边界条件判断选择的所述巡检点位能否被放置到所述第二个体中;
26、在判断选择的所述巡检点位能够被放置到第二个体中的情况下,确定本次更新完成;
27、在判断选择的所述巡检点位不能够被放置到第二个体中的情况下,返回执行按照所述工作时间从小到大的顺序选择一个未被选择的个体作为第二个体的步骤。
28、可选地,计算每个所述个体的工作时间,包括:
29、根据公式(2)计算所述工作时间,
30、
31、其中,ti为第i个个体的工作时间,a为所述巡检点位的数量,xij为表示第i个个体是否巡检第j个点位的指示变量,cj为第j个巡检点位的巡检时间,g为巡检路径的数量,yij为表示第i个个体是否经过第j条路径的指示变量,dj为第j条路径的行进时间。
32、可选地,所述控制方法还包括:
33、在判断所述控制协调度大于所述协调度阈值的情况下,判断当前的累计迭代次数是否大于或等于预设的迭代阈值;
34、在判断当前的累计迭代次数大于或等于所述迭代阈值的情况下,更新所述协调度阈值,并采用预设的路径更新方法更新所述个体;
35、在判断当前的累计迭代次数小于所述迭代阈值的情况下,采用预设的路径更新方法更新所述个体。
36、可选地,更新所述协调度阈值,包括:
37、根据公式(3)更新所述协调度阈值,
38、bat+1=bat+1, (3)
39、其中,bat+1为t+1代的所述协调度阈值,bat为t代的所述协调度阈值。
40、另一方面,本发明还提供一种基于知识库的机器人控制系统,所述控制系统包括处理器,所述处理器被配置成用于执行如上述任一所述的控制方法。
41、通过上述技术方案,本发明提供的基于知识库的机器人控制方法及系统通过结合变电现场的环境信息、操作流程信息以及机器人的属性信息来分配机器人巡检不同的巡检点位,使得机器人能够在同样的时间范围内完成变电站的巡检工作,提高了巡检的效率。
42、本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种基于知识库的机器人控制方法,其特征在于,所述控制方法包括:
2.根据权利要求1所述的控制方法,其特征在于,所述变电现场的环境信息包括多个巡检的巡检点位和路径细节,每个巡检点位对应有巡检内容和点位位置,每个路径细节包括每条路径的位置以及路径的类型。
3.根据权利要求1所述的控制方法,其特征在于,所述操作流程信息包括每个巡检点位的巡检次序以及综合巡检难度。
4.根据权利要求1所述的控制方法,其特征在于,基于机器人的属性信息以及所述边界条件,采用预设的机器人路径生成方法生成所述机器人的工作路径,包括:
5.根据权利要求4所述的控制方法,其特征在于,根据所述个体计算当前的控制协调度,包括:
6.根据权利要求4所述的控制方法,其特征在于,所述路径更新方法包括:
7.根据权利要求4所述的控制方法,其特征在于,计算每个所述个体的工作时间,包括:
8.根据权利要求4所述的控制方法,其特征在于,所述控制方法还包括:
9.根据权利要求8所述的控制方法,其特征在于,更新所述协调度阈值,包括:
10.一种基于知识库的机器人控制系统,其特征在于,所述控制系统包括处理器,所述处理器被配置成用于执行如权利要求1至9任一所述的控制方法。
技术总结
本发明实施例提供一种基于知识库的机器人控制方法及系统,属于电网的智能管理技术领域。所述控制方法包括:确定变电现场的环境信息、操作流程信息以及机器人的属性信息;根据所述环境信息生成用于控制机器人的第一状态信息;根据所述操作流程信息生成用于控制机器人的第二状态信息;基于所述第一状态信息、第二状态信息构建机器人工作场景的边界条件;基于机器人的属性信息以及所述边界条件,采用预设的机器人路径生成方法生成所述机器人的工作路径。该控制方法及系统通过结合变电现场的环境信息、操作流程信息以及机器人的属性信息来分配机器人巡检不同的巡检点位,使得机器人能够在同样的时间范围内完成变电站的巡检工作,提高了巡检的效率。
技术研发人员:刘年国,班东坡,唐旭明,訾君,孙占民,马建楠,柏跃程
受保护的技术使用者:国网安徽省电力有限公司淮南供电公司
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!