一种基于IROS机器人远距离跌落检测预警方法、装置和介质与流程
本发明涉及一种基于iros机器人远距离跌落检测预警方法、装置和介质,属于机器人预警。
背景技术:
1、传统机器人使用深度相机检测远处的跌落地形时,当跌落地形较远且接近或轻微超出深度相机量程时,存在数据受到干扰抖动的现象,检测结果不准确,当在复杂场景下时,干扰更加明显,机器人无法对远处视野量程边缘的有跌落风险地面距离进行准确判断并提前预警,存在安全隐患。
技术实现思路
1、本发明目的是提供了一种基于iros机器人远距离跌落检测预警方法、装置和介质,最大限度地防止机器人的跌落,保证机器人的安全。
2、本发明为实现上述目的,通过以下技术方案实现:
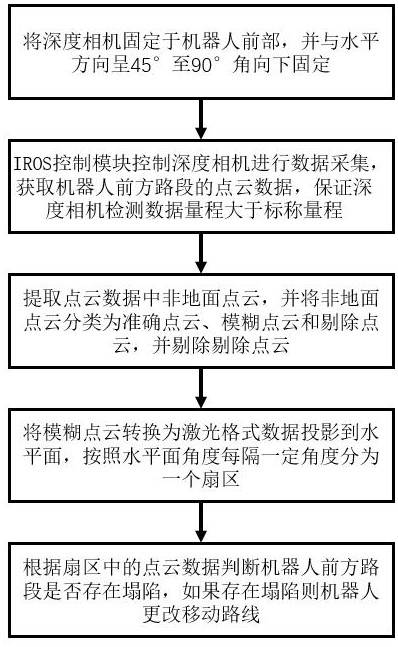
3、将深度相机固定于机器人前部,并与水平方向呈45°至90°角向下固定;
4、iros控制模块控制深度相机进行数据采集,获取机器人前方路段的点云数据,保证深度相机检测数据量程大于标称量程;
5、提取点云数据中非地面点云,并将非地面点云分类为准确点云、模糊点云和剔除点云,并剔除剔除点云;
6、将模糊点云转换为激光格式数据投影到水平面,按照水平面角度每隔一定角度分为一个扇区;
7、根据扇区中的点云数据判断机器人前方路段是否存在塌陷,如果存在塌陷则机器人更改移动路线。
8、优选的,将模糊点云转换为激光格式数据投影到水平面的角度分辨率为1°;所述每隔一定角度为5°。
9、优选的,当检测出的跌落点云距离小于时,为准确点云,当检测出的跌落点云距离在至之间时,为模糊点云,当检测出的跌落点云距离大于,为剔除点云。
10、优选的,根据扇区中的点云数据判断机器人前方路段是否存在塌陷,具体方式如下:
11、检测扇区内点云数据是否存在塌陷,如果跌落点云超过x个点云,则扇区内存在到坑陷,记录跌落点云距机器人的相对位置;
12、对塌陷位置进行复测,确认扇区内是否确实存在塌陷。
13、优选的,检检测跌落点云具体方式如下:设置垂直方向高度阈值,如果点云高度大于高度阈值,则为跌落点云。
14、优选的,所述复测方式具体如下:
15、机器人转动n度后快速转回原位置,之后来回反复运动,每次到达n度位置后记录原检测到跌落点云位置的扇区内点云个数,反复转动m次,记录扇区内跌落点云超过x个点云的次数;
16、当跌落点云超过x个点云的次数超过次时,从原始位置向前快速运动s米后向后快速返回原始位置,之后来回反复运动,每次到达s米位置后记录原检测到跌落点云位置的扇区内点云个数,反复转动m次,记录扇区内出现跌落点云超过x个点云的次数,当次数超过次,则确认此扇区检测到塌陷。
17、优选的,所述n大于等于5,m大于等于10,l大于等于0.2,x大于等于5。
18、本发明的优点在于:本发明在传统深度相机视觉防跌落检测的基础上,提出了基于iros的复杂干扰环境下机器人远距离跌落检测预警方法,由于跌落地形不同于普通障碍物,跌落后机器人损伤较大,对机器人来说存在较大危险,当机器人运动较快时机器人靠近跌落处后再进行防跌落检测存在较大跌落风险,在深度相机视野最远处进行准确防跌落检测可提前进行预警,可最大限度地防止机器人的跌落、保证机器人的安全。
技术特征:
1.一种基于iros机器人远距离跌落检测预警方法,其特征在于,包括:
2.根据权利要求1所述的基于iros机器人远距离跌落检测预警方法,其特征在于,将模糊点云转换为激光格式数据投影到水平面的角度分辨率为1°;所述每隔一定角度为5°。
3.根据权利要求1所述的基于iros机器人远距离跌落检测预警方法,其特征在于,当检测出的跌落点云距离小于时,为准确点云,当检测出的跌落点云距离在至之间时,为模糊点云,当检测出的跌落点云距离大于,为剔除点云,其中,表示深度相机最大量程,表示深度相机与水平方向夹角。
4.根据权利要求1所述的基于iros机器人远距离跌落检测预警方法,其特征在于,根据扇区中的点云数据判断机器人前方路段是否存在塌陷,具体方式如下:
5.根据权利要求4所述的基于iros机器人远距离跌落检测预警方法,其特征在于,检测跌落点云具体方式如下:设置垂直方向高度阈值,如果点云高度大于高度阈值,则为跌落点云。
6.根据权利要求5所述的基于iros机器人远距离跌落检测预警方法,其特征在于,所述复测方式具体如下:
7.根据权利要求6所述的基于iros机器人远距离跌落检测预警方法,其特征在于,所述n大于等于5,m大于等于10,s大于等于0.2,x大于等于5。
8.一种基于iros机器人远距离跌落检测预警装置,包括处理器和存储有程序指令的存储器,其特征在于,所述处理器被配置为在运行所述程序指令时,执行如权利要求1至7任一项所述的基于iros机器人远距离跌落检测预警方法。
9.一种计算机可读存储介质,其特征在于其上存储有计算机程序,该程序被处理器执行时实现如上述权利要求1-7任一项所述的方法。
技术总结
本发明提供了一种基于IROS机器人远距离跌落检测预警方法、装置和介质,属于机器人预警技术领域。包括:将深度相机固定于机器人前部,并与水平方向呈45°至90°角向下固定;IROS控制模块控制深度相机进行数据采集,获取机器人前方路段的点云数据;提取点云数据中非地面点云,并将非地面点云分类为准确点云、模糊点云和剔除点云,并剔除剔除点云;将模糊点云转换为激光格式数据投影到水平面,按照水平面角度每隔一定角度分为一个扇区;根据扇区中的点云数据判断机器人前方路段是否存在塌陷,如果存在塌陷则机器人更改移动路线。本发明在深度相机视野最远处进行准确防跌落检测可提前进行预警,可最大限度地防止机器人的跌落、保证机器人的安全。
技术研发人员:崔欣,李朝铭,刘来波
受保护的技术使用者:山东新一代信息产业技术研究院有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!