一种输电线路压接金具探伤机器人的升降装置的制作方法
本发明涉及输电线路检测,具体为一种输电线路压接金具探伤机器人的升降装置。
背景技术:
1、目前国内架空输电线路导线、地线的连接大量采用的是压接型电力金具,耐张线夹和直线接续管,这种电力金具既要承受导线或地线的全部张力,同时又是通流导体,一旦安装,就不再拆卸,输电线路是用变压器将发电机发出的电能升压后,再经断路器等控制设备接入输电线路来实现,输电线路分为架空输电线路和电缆线路等结构形式,架空输电线路由线路杆塔、导线、绝缘子、线路金具、拉线、杆塔基础、接地装置等构成,架设在地面之上,所以当电力金具出现问题时,运维人员很难及时发现,这为线路安全运行埋下重大隐患。当线路处于大负荷运行情况下,压接不符合要求的耐张线夹和接续管易引发局部发热温度过高而损伤导线,导致连接强度的降低,或因压接握力不足导致掉线,尤其是在导线覆冰或舞动的情况下,极可能因压接质量问题引发掉线事故,因此市面上出现了一些对输电线路检测的机器人,来帮助人们对输电线路进行检测,但是现有的输电线路检测机器人在使用的过程中还存在以下缺点:
2、现有的输电线路机器人在使用的过程中,需要人工将其提升至高处进行检测,这给工作人员到来很大的困难导致检修工作时间长,工作效率低下,而且工作人员因需要攀爬至工作高度,而存在较大的安全隐患,因此亟需一种输电线路压接金具探伤机器人的升降装置来改善上述问题。
技术实现思路
1、本发明的目的旨在至少解决所述技术缺陷之一。
2、为此,本发明的一个目的在于提出一种输电线路压接金具探伤机器人的升降装置,以解决背景技术中所提到的问题,克服现有技术中存在的不足。
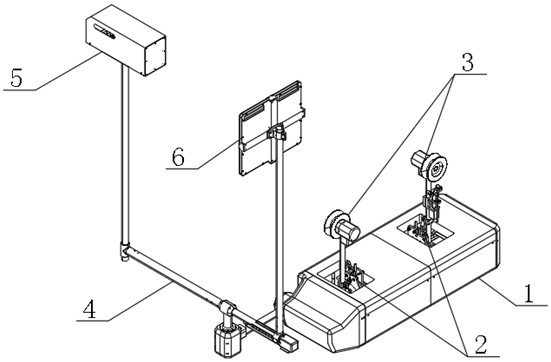
3、为了实现上述目的,本发明一方面的实施例提供一种输电线路压接金具探伤机器人的升降装置,包括机器人主体,所述机器人主体的内部设置有升降装置,所述机器人主体的顶部设置有驱动臂,所述机器人主体的一侧设置有转向臂,所述转向臂两端的顶部分别设置有x射线探伤机与成像板,所述机器人主体的内部设置有固定架,所述固定架的内部设置有固定横板,所述升降装置包括导绳电机,所述导绳电机的底部设置有安装座,所述安装座固定连接于固定横板的顶部。
4、本发明进一步设置为:所述导绳电机的一侧设置有安装板,所述安装板远离导绳电机的一侧设置有导绳罩,所述导绳罩的内部设置有齿轮卡板,所述导绳罩的顶部设置有导绳轮,两个所述齿轮卡板相邻的一侧设置有升降绳。
5、本发明进一步设置为:所述齿轮卡板与导绳电机的输出轴固定连接,且所述齿轮卡板与升降绳相适配。
6、通过采用上述技术方案,使得齿轮卡板能够被电机带动而转动,从而使齿轮卡板能够顺着升降绳向上攀爬。
7、本发明进一步设置为:所述升降绳与齿轮卡板相适配,且所述升降绳缠绕在导绳轮上。
8、通过采用上述技术方案,通过导绳轮的设置,使得升降绳能够顺着导绳轮导入与导出。
9、本发明进一步设置为:所述安装板的内部开设有导绳槽。
10、通过采用上述技术方案,升降绳能够置于导绳槽内,避免绳子发生缠绕的现象。
11、本发明进一步设置为:所述安装板的顶部设置有导绳环。
12、通过采用上述技术方案,导绳环的设置,有效的限制了升降绳的位置。
13、本发明进一步设置为:所述机器人本体内部的两端分别设置有陀螺仪传感器,且两个陀螺仪传感器与两个导绳电机均电连接。
14、通过采用上述技术方案,通过陀螺仪与导绳电机之间电连接,使得该装置可利用陀螺仪传感器自动控制每个导绳电机的速度,以保持升降过程中机器人主体的前后平衡。
15、综上所述,本发明的有益技术效果为:
16、一种输电线路压接金具探伤机器人的升降装置,通过导绳电机与升降绳的配合使用,使得机器人主体能够实现自动上升与下降,且机器人主体能够根据需要上升至所需工作高度,从而有效的减少了工作人员的工作负担,进而有效的提升了工作效率,并且有效的改善了工作人员因需要攀爬至工作高度,而存在较大的安全隐患的弊端,以有效的保障了工作人员的作业安全;
17、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种输电线路压接金具探伤机器人的升降装置,其特征在于:包括机器人主体(1),所述机器人主体(1)的内部设置有升降装置(2),所述机器人主体(1)的顶部设置有驱动臂(3),所述机器人主体(1)的一侧设置有转向臂(4),所述转向臂(4)两端的顶部分别设置有x射线探伤机(5)与成像板(6),所述机器人主体(1)的内部设置有固定架(7),所述固定架(7)的内部设置有固定横板(701),所述升降装置(2)包括导绳电机(8),所述导绳电机(8)的底部设置有安装座(801),所述安装座(801)固定连接于固定横板(701)的顶部。
2.根据权利要求1所述的一种输电线路压接金具探伤机器人的升降装置,其特征在于:所述导绳电机(8)的一侧设置有安装板(9),所述安装板(9)远离导绳电机(8)的一侧设置有导绳罩(10),所述导绳罩(10)的内部设置有齿轮卡板(11),所述导绳罩(10)的顶部设置有导绳轮(12),两个所述齿轮卡板(11)相邻的一侧设置有升降绳(13)。
3.根据权利要求2所述的一种输电线路压接金具探伤机器人的升降装置,其特征在于:所述齿轮卡板(11)与导绳电机(8)的输出轴固定连接,且所述齿轮卡板(11)与升降绳(13)相适配。
4.根据权利要求2所述的一种输电线路压接金具探伤机器人的升降装置,其特征在于:所述升降绳(13)与齿轮卡板(11)相适配,且所述升降绳(13)缠绕在导绳轮(12)上。
5.根据权利要求2所述的一种输电线路压接金具探伤机器人的升降装置,其特征在于:所述安装板(9)的内部开设有导绳槽(901)。
6.根据权利要求2所述的一种输电线路压接金具探伤机器人的升降装置,其特征在于:所述安装板(9)的顶部设置有导绳环(902)。
7.根据权利要求1所述的一种输电线路压接金具探伤机器人的升降装置,其特征在于:所述机器人本体内部的两端分别设置有陀螺仪传感器,且两个陀螺仪传感器与两个导绳电机(8)均电连接。
技术总结
本发明涉及输电线路检测技术领域,具体为一种输电线路压接金具探伤机器人的升降装置,包括机器人主体,所述机器人主体的内部设置有升降装置,所述机器人主体的顶部设置有驱动臂,所述机器人主体的一侧设置有转向臂,所述转向臂两端的顶部分别设置有X射线探伤机与成像板。一种输电线路压接金具探伤机器人的升降装置,通过导绳电机与升降绳的配合使用,使得机器人主体能够实现自动上升与下降,且机器人主体能够根据需要上升至所需工作高度,从而有效的减少了工作人员的工作负担,进而有效的提升了工作效率,并且有效的改善了工作人员因需要攀爬至工作高度,而存在较大的安全隐患的弊端。
技术研发人员:李明
受保护的技术使用者:李明
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!