一种仿生机械手的指端传感器及传感方法与流程
本发明涉及传感器的,尤其涉及的是一种仿生机械手的指端传感器及传感方法。
背景技术:
1、仿生机械手臂是机器人技术与生物力学相结合的产物,仿生机械手臂的使用,极大的解放了生产过程中的人力资源也提高了效率。
2、人类的生产工作过程是一个不断感知的过程,通过末端神经感受外部环境,如温度、湿度、粗糙平整度、握力大小等的感知。在不同的环境下机体会做出不同的操作。要实现仿生手进行类人操作,需要对仿生手实现末端传感,即对环境进行直接的感受与反馈。
3、现阶段的仿生手只能模仿人类部分屈指抓取部分行为动作,对于环境发生变化时,如温湿度、粗糙度以及压力变化,机体无法获得感知,进而作出类人操作,由于其嵌入的传感器传感信息较为单一,每次反馈信号的类型只有一种或者两种,因此将不同类型传感器进行集成以实现复杂信号的传感,集成度低,过程也较为繁琐。
4、因此,现有技术还有待改进和发展。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种仿生机械手的指端传感器及传感方法,旨在解决现有的传感器存在传感信息单一以及集成度低的问题。
2、第一方面,本申请提供一种仿生机械手的指端传感器,采用如下的技术方案:
3、一种仿生机械手的指端传感器,安装在仿生假手或者仿生机械手的末端,包括:
4、壳体、控制板以及传感模块,
5、所述传感模块与所述控制板电连接,用于感知外部信号并将外部信号转换为电信号传输至控制板,所述传感模块与所述控制板均安装在所述壳体内;
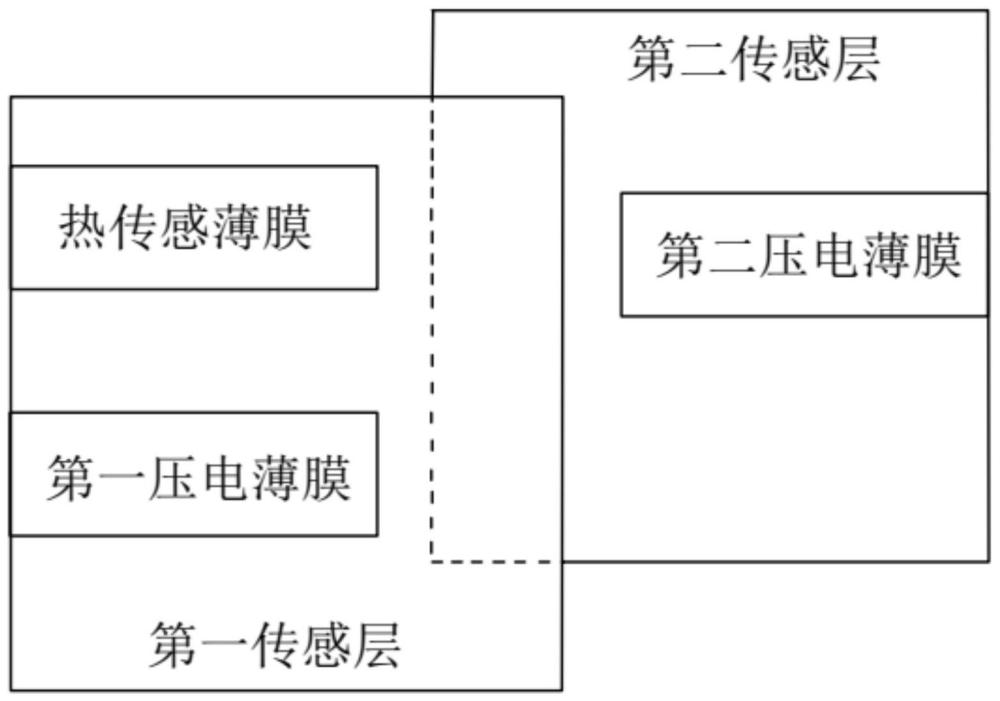
6、所述传感模块包括第一传感层与第二传感层,所述第一传感层叠放于所述第二传感层之上,所述第一传感层靠近接触面,所述第一传感层用于感知温度和粗糙度;所述第二传感层用于感知力度。
7、进一步地,所述第一传感层包括热传感薄膜以及第一压电薄膜,所述第一压电薄膜位于所述热传感薄膜的一侧,所述热传感薄膜与所述第一压电薄膜在同一平面内交叉放置;所述第一压电薄膜用于感知粗糙度,所述热传感薄膜用于感知温度。
8、进一步地,所述第二传感层包括第二压电薄膜,所述第二压电薄膜位于所述热传感薄膜以及所述第一压电薄膜的内层,所述第二压电薄膜用于感知力度。
9、进一步地,所述第一压电薄膜的压电常数值大于所述第二压电薄膜的压电常数值。
10、进一步地,所述热传感薄膜采用平面式柔性热传感薄膜。
11、进一步地,所述热传感薄膜两侧设有第一电极和第二电极,所述第一压电薄膜两侧设有第三电极和第四电极,所述第二压电薄膜两侧设有第五电极和第六电极;所述热传感薄膜通过第一电极和第二电极将感知信号传输至控制板;所述第一压电薄膜通过第三电极和第四电极将感知信号传输至控制板;所述第二压电薄膜通过第五电极和第六电极将感知信号传输至控制板。
12、进一步地,所述热传感薄膜、所述第一压电薄膜以及所述第二压电薄膜均与所述控制板电连接,所述控制板用于提供参考电压源和测试电阻,所述参考电压源、所述测试电阻与所述第一压电薄膜、所述第二压电薄膜以及所述热传感薄膜构成测试回路。
13、进一步地,所述热传感薄膜、所述第一压电薄膜以及所述第二压电薄膜的测试范围可以根据使用场景进行调整,所述测试电阻为可调电阻。
14、进一步地,所述第一压电薄膜和所述第二压电薄膜采用聚氟偏乙烯材料,用于将薄膜形变转换为电信号,且电信号大小与形变程度成正比例。
15、第二方面,本申请还提供一种仿生机械手的指端传感器的传感方法,采用如下的技术方案:
16、一种仿生机械手的指端传感器的传感方法,应用于如上所述的仿生机械手的指端传感器中,所述方法包括:
17、通过传感模块采集第一感知信号、第二感知信号与第三感知信号,并传递至控制板;其中,所述第一感知信号、所述第二感知信号以及所述第三感知信号分别用于指示物体的温度、粗糙度以及力度;
18、控制板根据第一感知信号、第二感知信号以及第三感知信号进行数据分析得到外部信号与物体的温度、粗糙度以及力度之间的关系。
19、本发明的有益效果:本申请中的传感模块通过采用第一传感层和第二传感层两层传感层,来实现传感信号的多样化以及集成度的提高。具体地,第一传感层用于感知粗糙度和温度;第二传感层用于感知力度。因此,两层传感层能够实现对粗糙度、温度以及力度的感知,同时实现具有温度感知、平整度感知以及压力感知的高集成度指端传感器,从而使仿生机械手能更精确地做出类人行为。
技术特征:
1.一种仿生机械手的指端传感器,安装在仿生假手或者仿生机械手的末端,其特征在于,包括:
2.根据权利要求1所述的仿生机械手的指端传感器,其特征在于,所述第一传感层包括热传感薄膜以及第一压电薄膜,所述第一压电薄膜位于所述热传感薄膜的一侧,所述热传感薄膜与所述第一压电薄膜在同一平面内交叉放置;所述第一压电薄膜用于感知粗糙度,所述热传感薄膜用于感知温度。
3.根据权利要求2所述的仿生机械手的指端传感器,其特征在于,所述第二传感层包括第二压电薄膜,所述第二压电薄膜位于所述热传感薄膜以及所述第一压电薄膜的内层,所述第二压电薄膜用于感知力度。
4.根据权利要求3所述的仿生机械手的指端传感器,其特征在于,所述第一压电薄膜的压电常数值大于所述第二压电薄膜的压电常数值。
5.根据权利要求2所述的仿生机械手的指端传感器,其特征在于,所述热传感薄膜采用平面式柔性热传感薄膜。
6.根据权利要求3所述的仿生机械手的指端传感器,其特征在于,所述热传感薄膜两侧设有第一电极和第二电极,所述第一压电薄膜两侧设有第三电极和第四电极,所述第二压电薄膜两侧设有第五电极和第六电极;所述热传感薄膜通过第一电极和第二电极将感知信号传输至控制板;所述第一压电薄膜通过第三电极和第四电极将感知信号传输至控制板;所述第二压电薄膜通过第五电极和第六电极将感知信号传输至控制板。
7.根据权利要求3所述的仿生机械手的指端传感器,其特征在于,所述热传感薄膜、所述第一压电薄膜以及所述第二压电薄膜均与所述控制板电连接,所述控制板用于提供参考电压源和测试电阻,所述参考电压源、所述测试电阻与所述第一压电薄膜、所述第二压电薄膜以及所述热传感薄膜构成测试回路。
8.根据权利要求7所述的仿生机械手的指端传感器,其特征在于,所述热传感薄膜、所述第一压电薄膜以及所述第二压电薄膜的测试范围可以根据使用场景进行调整,所述测试电阻为可调电阻。
9.根据权利要求3所述的仿生机械手的指端传感器,其特征在于,所述第一压电薄膜和所述第二压电薄膜采用聚氟偏乙烯材料,用于将薄膜形变转换为电信号,且电信号大小与形变程度成正比例。
10.一种仿生机械手的指端传感器的传感方法,应用于如权利要求1-9任一所述的仿生机械手的指端传感器中,其特征在于,所述方法包括:
技术总结
本发明公开一种仿生机械手的指端传感器及传感方法,涉及传感器领域,其包括:壳体、控制板以及传感模块,传感模块与控制板电连接,用于感知外部信号并将外部信号转换为电信号传输至控制板,传感模块与控制板均安装在壳体内;传感模块包括第一传感层与第二传感层,第一传感层叠放于第二传感层之上,第一传感层靠近接触面,第一传感层用于感知温度和粗糙度;第二传感层用于感知力度。通过将传感模块设置为两层传感层,分别用于感知温度、粗糙度和力度,并经过控制板的信号处理后,得到外部信号与物体表面温度、粗糙度以及力度的关系,同时实现具有温度感知、平整度感知以及压力感知的高集成度指端传感器,从而使仿生机械手能更精确地做出类人行为。
技术研发人员:代兵,黄奇,陈贞儒,张学记
受保护的技术使用者:人工智能与数字经济广东省实验室(深圳)
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!