一种大负载机器人的关节柔性补偿方法与流程
本发明涉及机器人绝对位置精度补偿,特别涉及一种大负载机器人的关节柔性补偿方法。
背景技术:
1、在精密装配、激光切割、曲面打磨等工艺场景,不仅要求机器人能实现精确的重复定位,而且还要求机器人拥有较高的绝对位置精度。大多数工业机器人都被设计为开放式串行链的旋转关节,关节中包含有减速器、皮带等柔性结构,而这些柔性结构会降低工业机器人的刚性。当机器人的旋转关节受到变形诱导力时,机器人的末端位置会发生偏移,进而对机器人的绝对位置精度造成影响。对于大负载机器人,由于其臂展长并且臂部重量大,各旋转关节在运动过程中会受到较大的变形诱导力,从而导致出现的变形现象尤为突出。因此,如何对大负载机器人各个关节的柔性变形进行补偿是至关重要的。
技术实现思路
1、本发明的目的在于克服现有技术的不足,提供一种大负载机器人的关节柔性补偿方法。
2、为实现上述目的,本发明采用如下的技术方案:
3、一种大负载机器人的关节柔性补偿方法一,包括以下步骤:
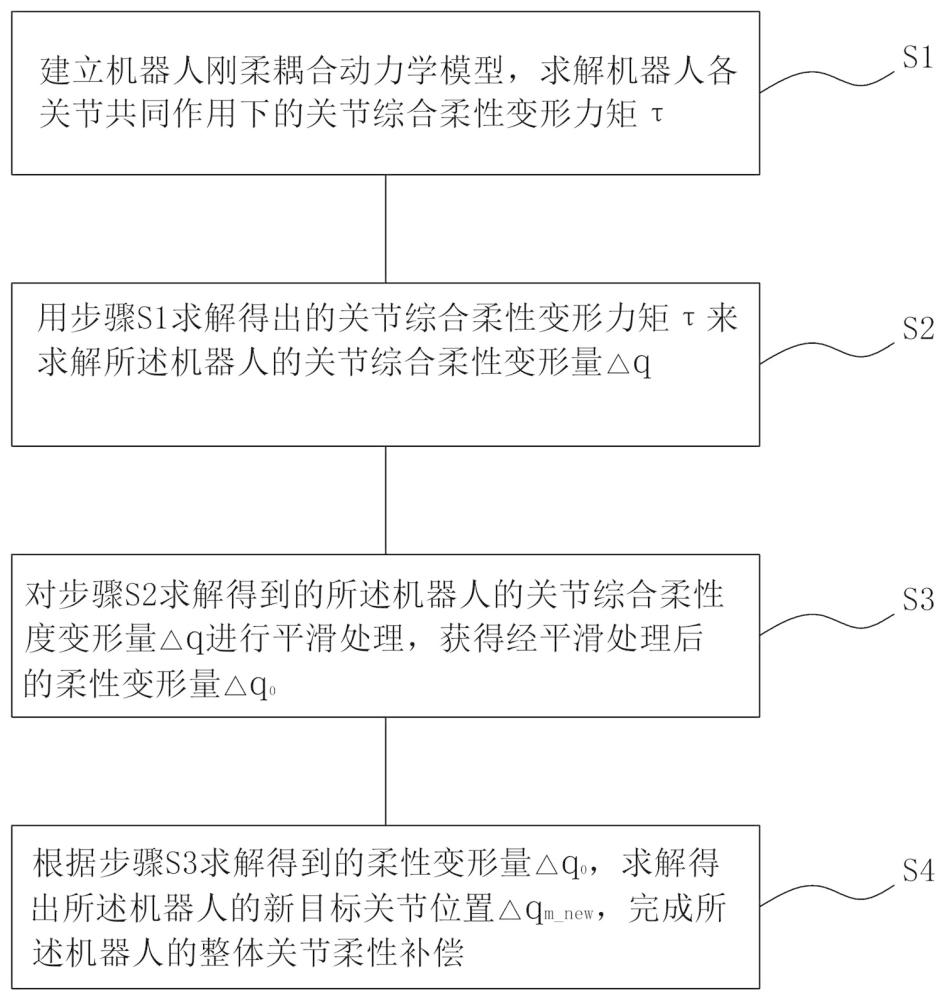
4、s1、建立机器人刚柔耦合动力学模型,根据机器人刚柔耦合动力学模型推导得出下列表达式(1),通过表达式(1)求解机器人各关节共同作用下的关节综合柔性变形力矩;
5、 (1)
6、表达式(1)中的m(q)为所述机器人的连杆惯性矩阵,mm为所述机器人的电机转子等效惯量矩阵,为所述机器人的离心力和科里奥利力矩阵,fvq为所述机器人的粘滞摩擦系数矩阵,fvqm为所述机器人的电机转子粘滞摩擦力,k为所述机器人的关节刚度矩阵,g(q)为所述机器人的连杆重力向量,为所述机器人的末端负载力等效到各关节的力矩,为所述机器人的连杆侧位置,为所述机器人的连杆侧速度,为所述机器人的连杆侧加速度,为所述机器人的电机侧位置,为所述机器人的电机侧速度,为所述机器人的电机侧加速度;
7、s2、将步骤s1求解得出的关节综合柔性变形力矩带入下列表达式(2),求解所述机器人的关节综合柔性变形量△q;
8、 (2)
9、s3、使用微分跟踪器对步骤s2求解得到的所述机器人的关节综合柔性度变形量△q进行平滑处理,获得经平滑处理后的柔性变形量△q0;
10、s4、将步骤s3获得的经平滑处理后的柔性变形量△q0代入下列表示式(4),求解得出所述机器人的新目标关节位置qm_new,完成所述机器人的整体关节柔性补偿;
11、 (4)
12、其中,qm_old表示所述机器人的旧目标关节位置。
13、一种大负载机器人的关节柔性补偿方法二,包括以下步骤:
14、s1、建立机器人静力学模型,分别计算各个关节的齐次坐标变化矩阵、、...、,i为机器人的关节数目,再根据各个关节对应的齐次坐标变化矩阵来求出对应的列向量、、....、,其中i为大于1的整数;
15、将各关节的列向量组成所述机器人相对于工具坐标系的工具坐标雅可比矩阵jtool,再将工具坐标雅可比矩阵jtool转换为相对于基坐标系的基坐标雅可比矩阵j0;
16、然后根据下列表达式(5)求解出所述机器人各关节共同作用下的关节综合柔性变形力矩;
17、 (5)
18、其中,fbase为相对于机器人基坐标系的机器人末端负载广义力;
19、s2、将步骤s1求解得出的关节综合柔性变形力矩带入下列表达式(2),求解所述机器人的关节综合柔性变形量△q;
20、 (2)
21、s3、使用微分跟踪器对步骤s2求解得到的所述机器人的关节综合柔性度变形量△q进行平滑处理,获得经平滑处理后的柔性变形量△q0;
22、s4、将步骤s3获得的经平滑处理后的柔性变形量△q0代入下列表示式(4),求解得出所述机器人的新目标关节位置qm_new,完成所述机器人的整体关节柔性补偿;
23、 (4)
24、其中,qm_old表示所述机器人的旧目标关节位置。
25、本发明的有益效果在于:本发明可对机器人进行关节柔性补偿,当机器人的旋转关节受到变形诱导力时,也能够保证机器人拥有较高的绝对位置精度。
技术特征:
1.一种大负载机器人的关节柔性补偿方法,其特征在于,包括以下步骤:
2.一种大负载机器人的关节柔性补偿方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种大负载机器人的关节柔性补偿方法,涉及机器人绝对位置精度补偿技术领域,包括以下步骤:S1、建立机器人刚柔耦合动力学模型,求解机器人各关节共同作用下的关节综合柔性变形力矩τ,S2、用τ来求解关节综合柔性变形量Δq;S3、对步骤S2求得的Δq进行平滑处理,获得经平滑处理后的柔性变形量Δq<subgt;0</subgt;;S4、根据步骤S3求解得到的Δq<subgt;0</subgt;,求解得出机器人的新目标关节位置q<subgt;m_new</subgt;,完成整体关节柔性补偿。本发明可对机器人进行关节柔性补偿,当机器人的旋转关节受到变形诱导力时,也能够保证机器人拥有较高的绝对位置精度。
技术研发人员:黄石峰,邓文彬,周星,杨林,冼耀琪,林耿聪,田茂胜
受保护的技术使用者:佛山华数机器人有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!