一种机器人抓取控制方法、装置、设备及存储介质与流程
本发明涉及视觉感知,尤其涉及一种机器人抓取控制方法、装置、设备及存储介质。
背景技术:
1、机器人视觉抓取是指基于视觉感知技术,选择合适的抓取姿态用以操纵末端执行器实现抓取。由于物体间形状大小不同、复杂的背景、物体间相互遮挡等情况,如何在混杂物体散乱堆叠场景下,实现快速准确的抓取是机器人视觉抓取面临的最大问题。
2、现有技术中,机器人都是直接依次抓取工作场景中的物体,当物体数量多时,产生的杂乱堆叠会影响机器人抓取效果,进而导致抓取失败率高,抓取效率低。
技术实现思路
1、本发明提供了一种机器人抓取控制方法、装置、设备及存储介质,以实现机器人的最佳视角选择和自动抓取。
2、根据本发明的一方面,提供了一种机器人抓取控制方法,该方法包括:
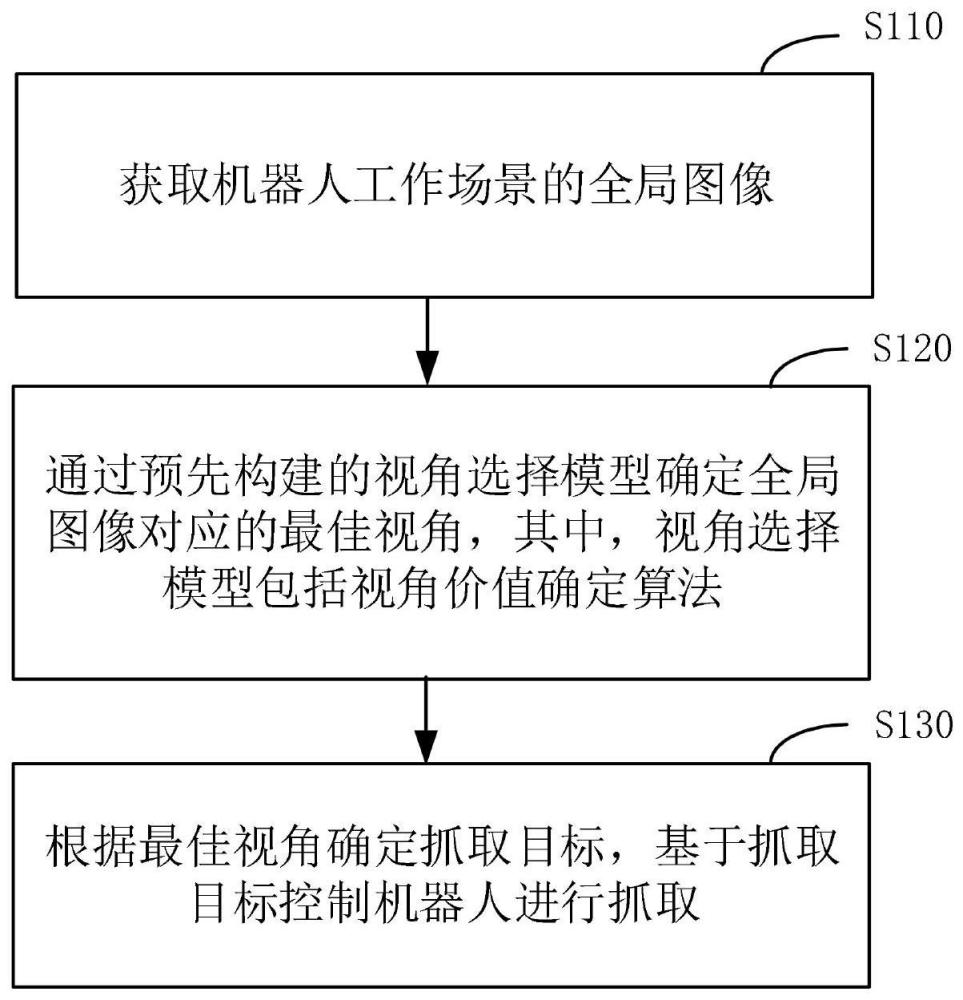
3、获取机器人工作场景的全局图像;
4、通过预先构建的视角选择模型确定全局图像对应的最佳视角,其中,视角选择模型包括视角价值确定算法;
5、根据最佳视角确定抓取目标,基于抓取目标控制机器人进行抓取。
6、可选的,获取机器人工作场景的全局图像,包括:获取当前工作场景的预设全局拍照点位,移动机器人至全局拍照点位进行拍摄,以获取拍摄图像;将拍摄图像进行指定格式转换以生成深度图像,将深度图像作为全局图像。
7、可选的,通过预先构建的视角选择模型确定全局图像对应的最佳视角,包括:确定全局图像对应的当前状态,根据当前状态确定视角选择动作,根据视角选择动作确定各待选择视角;基于视角选择模型确定各待选择视角对应的视角价值;将视角价值最高的待选择视角作为最佳视角,其中,最佳视角包括视角像素坐标。
8、可选的,根据最佳视角确定抓取目标,包括:将视角像素坐标代入坐标变换算法进行坐标变换,以生成机器人位置坐标;移动机器人至机器人位置坐标处进行拍摄,以获取最佳视角图像;将最佳视角图像进行指定格式转换以生成目标深度图像;通过预先构建的目标选择模型确定目标深度图像中的抓取目标。
9、可选的,通过预先构建的目标选择模型确定目标深度图像中的抓取目标,包括:确定目标深度图像中的各待抓取目标,并获取各待抓取目标的抓取相关信息;基于目标选择模型根据各抓取相关信息确定各待抓取目标的抓取成功率;将抓取成功率最高的待抓取目标作为抓取目标,其中,抓取目标包括目标像素坐标。
10、可选的,基于抓取目标控制机器人进行抓取,包括:将目标像素坐标代入坐标变换算法以生成机器人抓取坐标;基于机器人抓取坐标控制机器人进行抓取。
11、可选的,在控制机器人抓取抓取目标之后,还包括:判断工作场景是否清空,若是,生成任务完成提示,并将任务完成提示展示给用户;否则,移动机器人至全局拍照点位,以确定下一抓取目标,基于下一抓取目标控制机器人进行抓取。
12、根据本发明的另一方面,提供了一种机器人抓取控制装置,该装置包括:
13、全局图像获取模块,用于获取机器人工作场景的全局图像;
14、最佳视角确定模块,用于通过预先构建的视角选择模型确定全局图像对应的最佳视角,其中,视角选择模型包括视角价值确定算法;
15、目标抓取模块,用于根据最佳视角确定抓取目标,基于抓取目标控制机器人进行抓取。
16、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
17、至少一个处理器;以及
18、与所述至少一个处理器通信连接的存储器;其中,
19、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的一种机器人抓取控制方法。
20、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的一种机器人抓取控制方法。
21、本发明实施例的技术方案,通过移动机器人至预设的全局拍照点位以获取机器人工作场景的全局图像,将全局图像处理后输入至视角选择模型即可确定出全局图像对应的最佳视角,然后控制机器人移动至最佳视角确定出抓取目标,最终控制机器人基于该抓取目标进行抓取,直到工作场景清空,通过视角选择模型缩短了视角选择时间,并且在最佳视角处可以进一步实现从杂乱堆叠的物体中选取抓取目标,提高了抓取成功率,保证了机器人抓取效果,提高了抓取效率。
22、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种机器人抓取控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述获取机器人工作场景的全局图像,包括:
3.根据权利要求1所述的方法,其特征在于,所述通过预先构建的视角选择模型确定所述全局图像对应的最佳视角,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述最佳视角确定抓取目标,包括:
5.根据权利要求4所述的方法,其特征在于,所述通过预先构建的目标选择模型确定所述目标深度图像中的抓取目标,包括:
6.根据权利要求5所述的方法,其特征在于,所述基于所述抓取目标控制所述机器人进行抓取,包括:
7.根据权利要求2所述的方法,其特征在于,在所述控制机器人抓取所述抓取目标之后,还包括:
8.一种机器人抓取控制装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机存储介质,其特征在于,所述计算机存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的方法。
技术总结
本发明公开了一种机器人抓取控制方法、装置、设备及存储介质。包括:获取机器人工作场景的全局图像;通过预先构建的视角选择模型确定全局图像对应的最佳视角;根据最佳视角确定抓取目标,基于抓取目标控制机器人进行抓取。通过移动机器人至预设的全局拍照点位以获取机器人工作场景的全局图像,将全局图像处理后输入至视角选择模型即可确定出全局图像对应的最佳视角,然后控制机器人移动至最佳视角确定出抓取目标,最终控制机器人基于该抓取目标进行抓取,直到工作场景清空,通过视角选择模型缩短了视角选择时间,并且在最佳视角处可以进一步实现从杂乱堆叠的物体中选取抓取目标,提高了抓取成功率,保证了机器人抓取效果,提高了抓取效率。
技术研发人员:陈晓鸿
受保护的技术使用者:中国农业银行股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!