一种工业打磨机器人自换打磨头装置
本发明属于打磨机械,具体涉及一种工业打磨机器人自换打磨头装置。
背景技术:
1、打磨是一个需要高度精确的任务,精细的控制和稳定性对于获得高质量的打磨结果至关重要。不同材料和形状的工件可能需要特定类型的打磨头,现有的单头打磨机器可能无法适应各种打磨需求。缺乏灵活性可能意味着无法处理特殊形状的工件或在不同任务之间进行快速的切换。
2、传统打磨机器需要手动更换打磨头,或者仅支持有限种类的打磨头。采用自动转换机制更换打磨头可能涉及到复杂的机械部件和控制系统,可能会增加机器的复杂性、成本和维护难度。
3、市场上现有的打磨机器人通常使用一些简单的机械手或其他机械部件,由它们来完成打磨头的更换和安装。例如kuka型号机器人的解决方案,使用了一种名为“flexfellow”的机械手臂,该臂可以自动更换不同种类的打磨头。该机器人系统安装了触觉传感器和视觉系统,可以感知工件的表面状态并进行实时反馈。在机器人进行打磨过程时,通过使用数字控制方法,它可以调整打磨头的旋转速度、压力等参数,确保打磨质量和效率。同时,该机器人还具有防护装置和安全措施,以确保运行过程中的安全性。
4、综上,常用的自动更换打磨头的方法包括使用机械臂、刀座、磨头夹头等机械部件。这样自动更换打磨头所用机械部件都需要与控制系统相结合,以实现精确的打磨和自动转换,由此可见这种解决方案成本较高,实际应用中难度较大。为此我们提出一种工业打磨机器人自换打磨头装置。
技术实现思路
1、本发明的目的是提供一种工业打磨机器人自换打磨头装置,能够无需增设额外的控制系统即可实现整个装置的自动更换打磨头功能,有效降低更换打磨头所需的成本,实际应用到工业打磨的难度也不大。
2、本发明采取的技术方案具体如下:
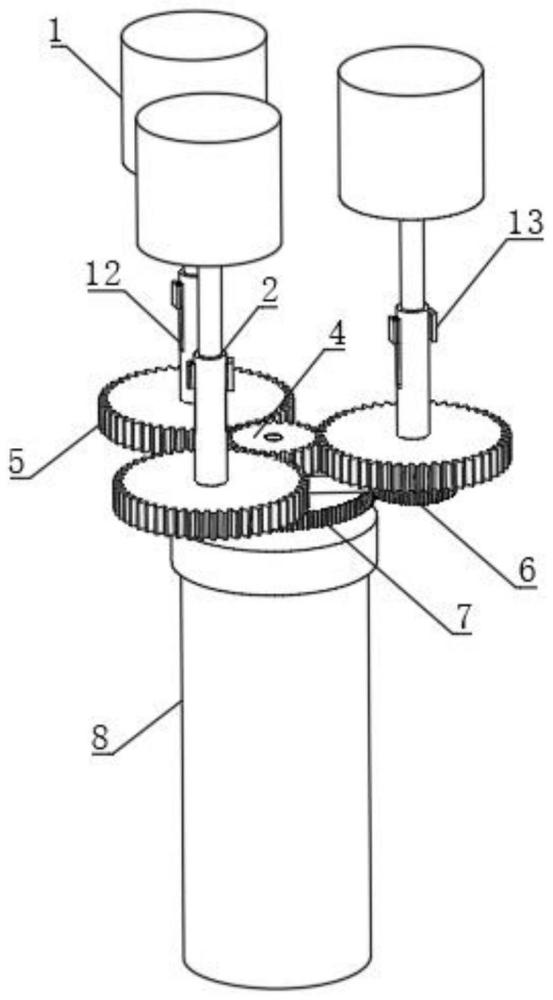
3、一种工业打磨机器人自换打磨头装置,包括至少三个目数不同的打磨头及其配套的支撑杆以及行星轮系,所述支撑杆的两端分别连接于行星轮系以及打磨头尾部的中间,预先装好打磨头,工作时,将行星轮系装在工业打磨机器人上,驱动行星轮系围绕工业打磨机器人的公轴旋转且多个打磨头自转,能够将指定打磨头对准工件进行打磨,无需增设额外的控制系统即可实现整个装置的自动更换打磨头功能,有效降低更换打磨头所需的成本,整个装置仅需在工业打磨机器人上加装行星轮系,实际应用到工业打磨的难度也不大。
4、所述行星轮系包括主轴以及主轴上从下至上依次连接的四级齿轮、行星架和一级齿轮,所述支撑杆下端固定有二级齿轮,所述二级齿轮均转动安装在行星架顶部靠近边沿的位置,所述二级齿轮均与一级齿轮相互啮合,所述行星架的下表面转动安装有与一个二级齿轮同轴的三级齿轮,所述四级齿轮与三级齿轮相互啮合,工业打磨机器人启动后,转动一级齿轮带动二级齿轮自转,使打磨头自转来打磨工件,并且二级齿轮带动三级齿轮旋转沿四级齿轮行走,带动二级齿轮及其对应的打磨头围绕工业打磨机器人公转,更换对准工件的打磨头。
5、还包括主轴连接的通用角磨机,所述通用角磨机的输出端沿轴向固定连接于主轴远离一级齿轮的一端,作为工业打磨机器人提供动力,以便驱动整个装置运行。
6、所述多角状,每个角对应安装一个二级齿轮,所述三级齿轮位于其中一个角下方,以便二级齿轮被一级齿轮驱动时在对应支杆上自转。
7、所述所述三级齿轮的直径小于二级齿轮。
8、所述支撑杆均由圆管以及插设在圆管内部的短杆组成,所述短杆的一端均延伸出对应圆管内部且沿轴向固定连接于对应打磨头尾部的中间,所述短杆的另一端均沿轴向固安装有弹簧,所述圆管远离打磨头的一端均沿轴向固定连接于对应二级齿轮的中间,工作时,利用弹簧进行轴向冲击和振动的吸收,防止支撑杆在实际工作中由于收到刚性冲击而断裂。
9、所述圆管的两侧分别开设有两个对称的贯通孔,所述短杆插入圆管的一端连接有限位块,所述限位块与贯通孔滑动连接。
10、本发明取得的技术效果为:
11、本发明的一种工业打磨机器人自换打磨头装置,工作时,启动通用角磨机转动四级齿轮,驱动由一级齿轮、二级齿轮、三级齿轮以及四级齿轮组成的行星轮系转动,带动多个打磨头及对应支撑杆围绕通用角磨机旋转指定角度,且多个打磨头自转,能够将指定打磨头对准工件进行打磨,无需增设额外的控制系统即可实现整个装置的自动更换打磨头功能,有效降低更换打磨头所需的成本,实际应用到工业打磨的难度也不大。
12、本发明的一种工业打磨机器人自换打磨头装置,利用弹簧进行轴向冲击和振动的吸收,防止支撑杆在实际工作中由于收到刚性冲击而断裂。
技术特征:
1.一种工业打磨机器人自换打磨头装置,其特征在于:包括至少三个打磨头(1)及其配套的支撑杆(2)以及行星轮系,所述支撑杆(2)的两端分别连接于行星轮系以及打磨头(1)尾部的中间。
2.根据权利要求1所述的一种工业打磨机器人自换打磨头装置,其特征在于:所述行星轮系包括主轴(9)以及主轴(9)上从下至上依次连接的四级齿轮(7)、行星架(10)和一级齿轮(4),所述支撑杆(2)下端固定有二级齿轮(5),所述二级齿轮(5)均转动安装在行星架(10)顶部靠近边沿的位置,所述二级齿轮(5)均与一级齿轮(4)相互啮合,所述行星架(10)的下表面转动安装有与一个二级齿轮(5)同轴的三级齿轮(6),所述四级齿轮(7)与三级齿轮(6)相互啮合。
3.根据权利要求2所述的一种工业打磨机器人自换打磨头装置,其特征在于:还包括主轴(9)连接的通用角磨机(8)。
4.根据权利要求2所述的一种工业打磨机器人自换打磨头装置,其特征在于:所述行星架(10)呈多角状,每个角对应安装一个二级齿轮(5),所述三级齿轮(6)位于其中一个角下方。
5.根据权利要求2所述的一种工业打磨机器人自换打磨头装置,其特征在于:所述三级齿轮(6)的直径小于二级齿轮(5)。
6.根据权利要求2所述的一种工业打磨机器人自换打磨头装置,其特征在于:所述支撑杆(2)均由圆管以及插设在圆管内部的短杆组成,所述短杆的一端均延伸出对应圆管内部且沿轴向固定连接于对应打磨头(1)尾部的中间,所述短杆的另一端均沿轴向固安装有弹簧(3),所述圆管远离打磨头(1)的一端均沿轴向固定连接于对应二级齿轮(5)的中间。
7.根据权利要求6所述的一种工业打磨机器人自换打磨头装置,其特征在于:所述圆管的两侧分别开设有两个对称的贯通孔(12),所述短杆插入圆管的一端连接有限位块(13),所述限位块(13)与贯通孔(12)滑动连接。
8.根据权利要求1所述的一种工业打磨机器人自换打磨头装置,其特征在于:多个所述打磨头(1)的粗糙度不同。
技术总结
本发明属于打磨机械技术领域,具体涉及一种工业打磨机器人自换打磨头装置,包括至少三个目数不同的打磨头及其配套的支撑杆以及行星轮系,支撑杆的两端分别连接于行星轮系以及打磨头尾部的中间,预先装好打磨头,行星轮系包括主轴以及主轴上从下至上依次连接的四级齿轮、行星架和一级齿轮,支撑杆下端固定有二级齿轮,二级齿轮均转动安装在行星架顶部靠近边沿的位置,二级齿轮均与一级齿轮相互啮合,行星架的下表面转动安装有与一个二级齿轮同轴的三级齿轮。本发明无需增设额外的控制系统即可实现整个装置的自动更换打磨头功能,有效降低更换打磨头所需的成本,实际应用到工业打磨的难度也不大。
技术研发人员:王安恒,王涛,王辉,凌传文,李凡,张伟,段尚岐,王风涛,王建彬
受保护的技术使用者:安徽工程大学
技术研发日:
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!