本发明涉及9轴悬臂机器,具体为一种新型的9轴悬臂机器人。
背景技术:
1、多轴机器人又称单轴机械手,工业机械臂,电缸等,是以xyz直角坐标系统为基本数学模型,以伺服电机、步进电机为驱动的单轴机械臂为基本工作单元,以滚珠丝杆、同步皮带、齿轮齿条为常用的传动方式所架构起来的机器人系统,可以完成在xyz三维坐标系中任意一点的到达和遵循可控的运动轨迹。多轴机器人采用运动控制系统实现对其的驱动及编程控制,直线、曲线等运动轨迹的生成为多点插补方式,操作及编程方式为引导示教编程方式或坐标定位方式。
2、现有的轴悬臂机器人的连接端在与工具端在对接时大多都是通过螺栓将工具端安装在轴悬臂机器人的连接端上,当需要对工具端进行更换时,需要通过工具拆卸螺栓才能将原有的工具端拆卸再进行更换新的工具端,在安装时又需要重新装上螺栓对工具端进行固定,操作起来不够简单方便,费时费力,由此我们提出一种新型的9轴悬臂机器人来解决以上问题。
技术实现思路
1、针对现有技术的不足,本发明提供了一种新型的9轴悬臂机器人,具备方便更换工具端等优点,解决了现有的轴悬臂机器人的连接端在与工具端在对接时大多都是通过螺栓将工具端安装在轴悬臂机器人的连接端上,当需要对工具端进行更换时,需要通过工具拆卸螺栓才能将原有的工具端拆卸再进行更换新的工具端,在安装时又需要重新装上螺栓对工具端进行固定,操作起来不够简单方便,费时费力的问题。
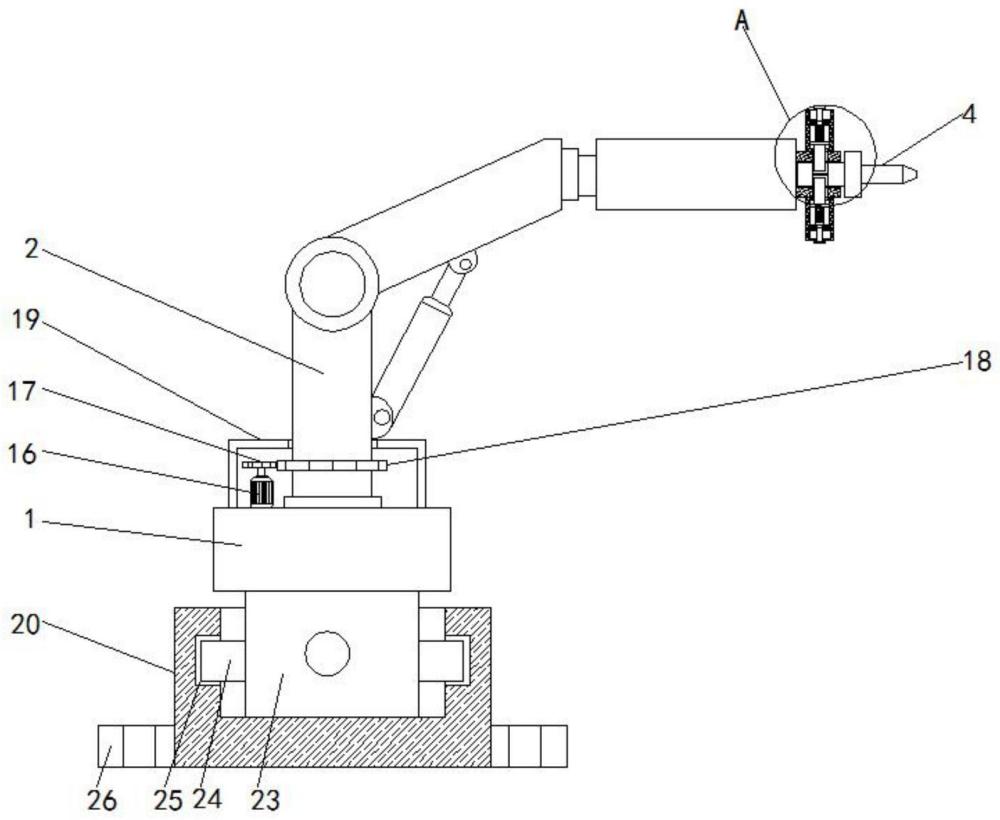
2、为实现上述方便更换工具端的目的,本发明提供如下技术方案:一种新型的9轴悬臂机器人,包括安装板、移动座、9轴悬臂机器臂本体和工具端,所述9轴悬臂机器臂本体转动安装在安装板的顶部,所述9轴悬臂机器臂本体的输出端固定安装有连接罩,所述工具端的左侧固定安装有延伸到连接罩内部的连接块,所述连接罩的顶部和底部均设置有限位组件,所述限位组件包括分别固定安装在连接罩顶部和底部的两个安装罩,所述安装罩的外侧插接与延伸到安装罩内部的拉杆,所述拉杆的左右两侧均固定安装有延伸到安装罩内壁内部的限位块,所述安装罩的内壁固定安装有固定块,所述拉杆位于安装罩内部的一端转动安装有延伸到固定块另一侧的活动杆,所述活动杆的另一端固定安装有活动块,所述活动块与固定块之间固定安装有弹簧,所述弹簧套接在活动杆的外部,所述活动块的另一侧固定安装有延伸到连接块内部的卡杆。
3、进一步,所述安装罩左右两侧的内壁均开设有滑槽,所述限位块延伸到安装罩内壁内部的一端与对应的滑槽滑动连接。
4、进一步,所述连接块的顶部和底部均开设有卡槽,所述卡杆延伸到连接块内部的一端与对应的卡槽相卡接。
5、进一步,所述活动杆与固定块的内壁滑动连接,所述活动块与安装罩的内壁滑动连接。
6、进一步,所述9轴悬臂机器臂本体的表面固定安装有齿环,所述安装板的顶部且位于9轴悬臂机器臂本体的左侧固定安装有第一电机,所述第一电机的输出端固定安装有与齿环相啮合的齿轮。
7、进一步,所述安装板的顶部固定安装有固定罩,所述齿轮和齿环均位于固定罩的内部。
8、进一步,所述移动座的后侧固定安装有第二电机,所述第二电机的输出端固定安装有与移动座前侧的内壁转动连接的丝杆,所述丝杆的表面螺纹安装有支撑块,所述安装板固定安装在支撑块的顶部。
9、进一步,所述移动座的左右两侧均固定安装有定位块,所述定位块的表面开设有通孔。
10、进一步,所述移动座左右两侧的内壁均开设有稳定槽,所述支撑块的左右两侧均固定安装有一端延伸到对应的稳定槽内部的稳定块。
11、与现有技术相比,本发明提供了一种新型的9轴悬臂机器人,具备以下
12、有益效果:
13、1、该新型的9轴悬臂机器人,通过拉动拉杆使得卡杆向远离卡槽的方向移动,此时限位块会在滑槽内滑动,当限位块脱离滑槽时,转动拉杆使得限位块与安装罩之间相互卡接,从而使得拉杆被限位,此时卡杆也已经完全脱离卡槽,由此使得连接块不再被限位,进而可以直接取下工具端进行更换,操作起来简单方便,且不需要使用到任何工具,省时省力,大大提高了该装置的实用性。
14、2、该新型的9轴悬臂机器人,通过启动第一电机带动齿轮转动从而通过齿环可以使得9轴悬臂机器臂转动,由此方便调整工具端的方向,通过启动第二电机带动丝杆转动,从而可以使得支撑块移动,进而可以使得安装板移动,由此可以使得9轴悬臂机器臂移动,方便调整工具端的位置,由此大大提高了9轴悬臂机器人的灵活性。
技术特征:1.一种新型的9轴悬臂机器人,包括安装板(1)、移动座(20)、9轴悬臂机器臂本体(2)和工具端(4),其特征在于:所述9轴悬臂机器臂本体(2)转动安装在安装板(1)的顶部,所述9轴悬臂机器臂本体(2)的输出端固定安装有连接罩(3),所述工具端(4)的左侧固定安装有延伸到连接罩(3)内部的连接块(13),所述连接罩(3)的顶部和底部均设置有限位组件;
2.根据权利要求1所述的一种新型的9轴悬臂机器人,其特征在于:所述安装罩(5)左右两侧的内壁均开设有滑槽(15),所述限位块(7)延伸到安装罩(5)内壁内部的一端与对应的滑槽(15)滑动连接。
3.根据权利要求1所述的一种新型的9轴悬臂机器人,其特征在于:所述连接块(13)的顶部和底部均开设有卡槽(14),所述卡杆(12)延伸到连接块(13)内部的一端与对应的卡槽(14)相卡接。
4.根据权利要求1所述的一种新型的9轴悬臂机器人,其特征在于:所述活动杆(9)与固定块(8)的内壁滑动连接,所述活动块(10)与安装罩(5)的内壁滑动连接。
5.根据权利要求1所述的一种新型的9轴悬臂机器人,其特征在于:所述9轴悬臂机器臂本体(2)的表面固定安装有齿环(18),所述安装板(1)的顶部且位于9轴悬臂机器臂本体(2)的左侧固定安装有第一电机(16),所述第一电机(16)的输出端固定安装有与齿环(18)相啮合的齿轮(17)。
6.根据权利要求5所述的一种新型的9轴悬臂机器人,其特征在于:所述安装板(1)的顶部固定安装有固定罩(19),所述齿轮(17)和齿环(18)均位于固定罩(19)的内部。
7.根据权利要求1所述的一种新型的9轴悬臂机器人,其特征在于:所述移动座(20)的后侧固定安装有第二电机(21),所述第二电机(21)的输出端固定安装有与移动座(20)前侧的内壁转动连接的丝杆(22),所述丝杆(22)的表面螺纹安装有支撑块(23),所述安装板(1)固定安装在支撑块(23)的顶部。
8.根据权利要求1所述的一种新型的9轴悬臂机器人,其特征在于:所述移动座(20)的左右两侧均固定安装有定位块(26),所述定位块(26)的表面开设有通孔。
9.根据权利要求7所述的一种新型的9轴悬臂机器人,其特征在于:所述移动座(20)左右两侧的内壁均开设有稳定槽(25),所述支撑块(23)的左右两侧均固定安装有一端延伸到对应的稳定槽(25)内部的稳定块(24)。
技术总结本发明涉及一种新型的9轴悬臂机器人,包括安装板、移动座、9轴悬臂机器臂本体和工具端,所述9轴悬臂机器臂本体转动安装在安装板的顶部,所述9轴悬臂机器臂本体的输出端固定安装有连接罩,所述工具端的左侧固定安装有延伸到连接罩内部的连接块,所述连接罩的顶部和底部均设置有限位组件,所述限位组件包括分别固定安装在连接罩顶部和底部的两个安装罩,所述安装罩的外侧插接与延伸到安装罩内部的拉杆,所述拉杆的左右两侧均固定安装有延伸到安装罩内壁内部的限位块,所述安装罩的内壁固定安装有固定块。该新型的9轴悬臂机器人,可以直接取下工具端进行更换,操作起来简单方便,且不需要使用到任何工具,大大提高了该装置的实用性。
技术研发人员:李博,贝科东
受保护的技术使用者:博思德(南通)智能装备技术有限公司
技术研发日:技术公布日:2024/1/25