机器人作业方法、装置、设备以及存储介质与流程
本申请涉及机器人,特别是涉及一种机器人作业方法、装置、设备以及存储介质。
背景技术:
1、近年来,机器人技术在国内外已取得快速的发展,越来越多的机器人厂商开始部署仓储机器人方向。传统的举升式、叉取式agv(automated guided vehicle)已经逐步发展成熟,尤其是举升式agv,已经大范围运用于各种行业厂商的仓库中。
2、在agv作业过程中,常通过识别作业环境中的二维码来确定位姿,但若是agv的相机位置偏移,或是二维码被遮挡、污损的情况下,则无法准确及时地获取位姿,从而降低agv的作业精度。
技术实现思路
1、本申请至少提供一种机器人作业方法、装置、设备以及计算机可读存储介质。
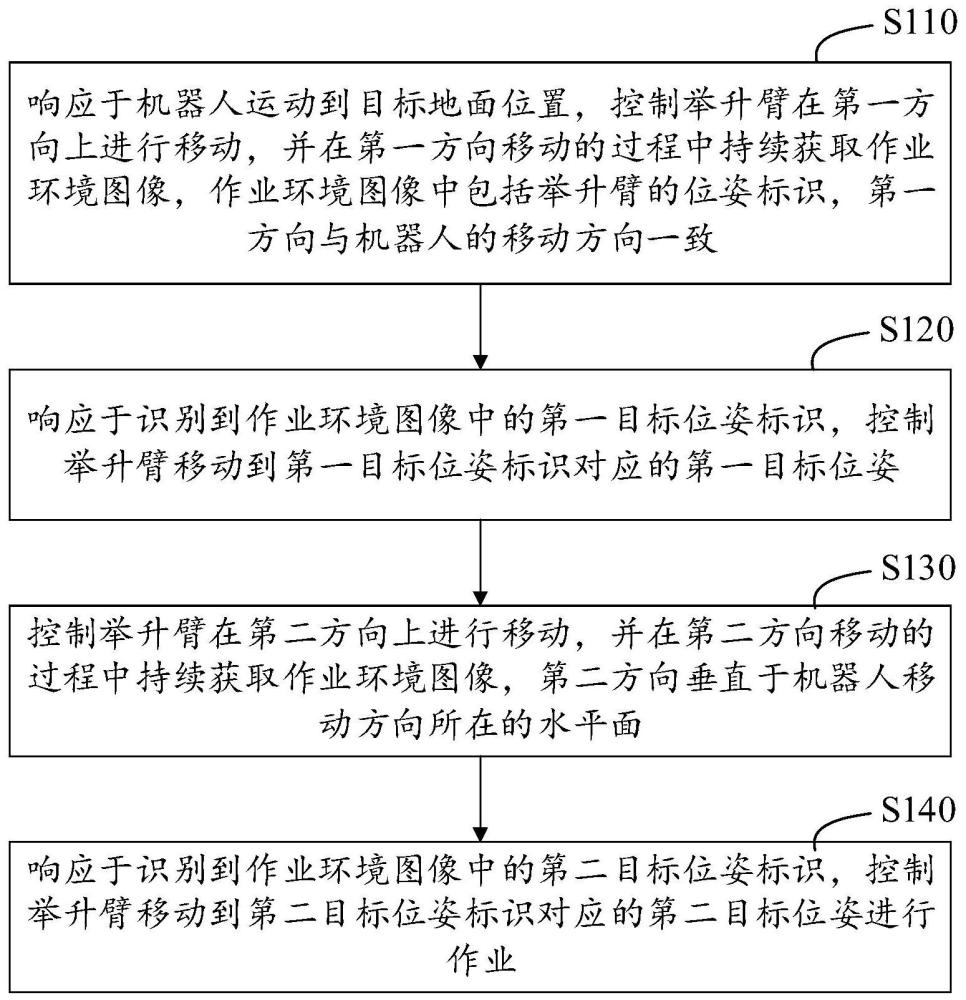
2、本申请第一方面提供了一种机器人作业方法,包括:响应于所述机器人运动到目标地面位置,控制所述举升臂在第一方向上进行移动,并在所述第一方向移动的过程中持续获取作业环境图像,所述作业环境图像中包括所述举升臂的位姿标识,所述第一方向与所述机器人的移动方向一致;响应于识别到所述作业环境图像中的第一目标位姿标识,控制所述举升臂移动到所述第一目标位姿标识对应的第一目标位姿;控制所述举升臂在第二方向上进行移动,并在所述第二方向移动的过程中持续获取所述作业环境图像,所述第二方向垂直于所述机器人移动方向所在的水平面;响应于识别到所述作业环境图像中的第二目标位姿标识,控制所述举升臂移动到所述第二目标位姿标识对应的第二目标位姿进行作业。
3、在一实施例中,所述第一目标位姿标识和所述第二目标位姿标识之间存在预设的线段标识,所述控制所述举升臂在第二方向上进行移动,并在所述第二方向移动的过程中持续获取所述作业环境图像的步骤,所述方法还包括:识别所述作业环境图像中的线段标识,得到所述举升臂的实时举升高度;沿所述线段标识对所述举升臂的实时举升高度进行调节,直至识别到所述作业环境图像中的第二目标位姿标识。
4、在一实施例中,所述位姿标识排列在棋盘格形式的位姿标识集合中,所述位姿标识包括第一位姿标识和所述第一目标位姿标识,所述控制所述举升臂在第一方向上进行移动,并在所述第一方向移动的过程中持续获取作业环境图像的步骤,包括:对所述作业环境图像中的第一位姿标识进行角点识别,得到标识角点;将所述标识角点进行插值运算,得到所述位姿标识集合的棋盘格角点;对所述标识角点、所述棋盘格角点使用预设的位姿估计算法进行位姿计算,得到所述举升臂的当前位姿信息;基于所述当前位姿信息控制所述举升臂进行移动,直至识别到所述作业环境图像中的第一目标位姿标识。
5、在一实施例中,所述基于所述当前位姿信息控制所述举升臂进行移动,直至识别到所述作业环境图像中的第一目标位姿标识的步骤,包括:基于所述当前位姿信息控制所述举升臂在第一方向上进行移动,并持续获取所述作业环境图像;对所述作业环境图像进行逐帧识别,直至识别到所述作业环境图像中的第一目标位姿标识或运动到所述第一目标位姿标识对应的位姿,暂停或停止所述举升臂移动。
6、在一实施例中,所述持续获取作业环境图像的步骤,包括:对采集到的初始图像进行灰度转换,得到灰度图像;对所述灰度图像进行图像优化处理,得到优化图像;对所述优化图像进行二值化处理,得到所述作业环境图像。
7、在一实施例中,在所述控制所述举升臂在第二方向上进行移动的步骤之前,所述方法还包括:对所述第一目标位姿标识进行识别,得到所述第一目标位姿标识对应的识别码信息;判断所述第一目标位姿标识对应的识别码信息是否和获取到的所述机器人的识别码信息匹配;若否,则停止所述机器人作业。
8、在一实施例中,在所述响应于所述机器人运动到目标地面位置,控制所述举升臂在第一方向上进行移动的步骤之前,所述方法还包括:采集机器人运动过程中的地面图像;若识别到所述地面图像中存在预设的目标地面标识,则判定所述机器人运动到所述目标地面位置。
9、本申请第二方面提供了一种机器人作业装置,包括:获取模块,用于响应于所述机器人运动到目标地面位置,控制所述举升臂在第一方向上进行移动,并在所述第一方向移动的过程中持续获取作业环境图像,所述作业环境图像中包括所述举升臂的位姿标识,所述第一方向与所述机器人的移动方向一致;第一调节模块,用于响应于识别到所述作业环境图像中的第一目标位姿标识,控制所述举升臂移动到所述第一目标位姿标识对应的第一目标位姿;第二调节模块,用于控制所述举升臂在第二方向上进行移动,并在所述第二方向移动的过程中持续获取所述作业环境图像,所述第二方向垂直于所述机器人移动方向所在的水平面;作业模块,用于响应于识别到所述作业环境图像中的第二目标位姿标识,控制所述举升臂移动到所述第二目标位姿标识对应的第二目标位姿进行作业。
10、本申请第三方面提供了一种电子设备,包括存储器和处理器,处理器用于执行存储器中存储的程序指令,以实现上述机器人作业方法。
11、本申请第四方面提供了一种计算机可读存储介质,其上存储有程序指令,程序指令被处理器执行时实现上述机器人作业方法。
12、上述方案,在机器人作业环境中设置多个位姿标识,通过机器人在作业过程中对多个位姿标识的识别结果确定机器人的位姿信息,并根据机器人的位姿信息控制机器人的举升臂的运动调节,由此能够基于多个位姿标识对机器人进行分阶段控制,有利于在调节过程中多次获得位姿反馈,从而使整体调节流程更加稳定且平滑,提高机器人的作业精度。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本申请。
技术特征:
1.一种机器人作业方法,其特征在于,所述机器人包括举升臂,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述第一目标位姿标识和所述第二目标位姿标识之间存在预设的线段标识,所述控制所述举升臂在第二方向上进行移动,并在所述第二方向移动的过程中持续获取所述作业环境图像的步骤,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,所述位姿标识排列在棋盘格形式的位姿标识集合中,所述位姿标识包括第一位姿标识和所述第一目标位姿标识,所述控制所述举升臂在第一方向上进行移动,并在所述第一方向移动的过程中持续获取作业环境图像的步骤,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述当前位姿信息控制所述举升臂进行移动,直至识别到所述作业环境图像中的第一目标位姿标识的步骤,包括:
5.根据权利要求1所述的方法,其特征在于,所述持续获取作业环境图像的步骤,包括:
6.根据权利要求1所述的方法,其特征在于,在所述控制所述举升臂在第二方向上进行移动的步骤之前,所述方法还包括:
7.根据权利要求1所述的方法,其特征在于,在所述响应于所述机器人运动到目标地面位置,控制所述举升臂在第一方向上进行移动的步骤之前,所述方法还包括:
8.一种机器人作业装置,其特征在于,所述机器人包括举升臂,所述装置包括:
9.一种电子设备,其特征在于,包括存储器和处理器,所述处理器用于执行所述存储器中存储的程序指令,以实现权利要求1至7任一项所述的方法。
10.一种计算机可读存储介质,其上存储有程序指令,其特征在于,所述程序指令被处理器执行时实现权利要求1至7任一项所述的方法。
技术总结
本申请公开了一种机器人作业方法、装置、设备以及存储介质,该机器人作业方法包括:响应于机器人运动到目标地面位置,控制举升臂在第一方向上进行移动,并持续获取作业环境图像,作业环境图像中包括举升臂的位姿标识,第一方向与机器人的移动方向一致;响应于识别到作业环境图像中的第一目标位姿标识,控制举升臂移动到第一目标位姿标识对应的第一目标位姿;控制举升臂在第二方向上进行移动,并在第二方向移动的过程中持续获取作业环境图像,第二方向垂直于机器人移动方向所在的水平面;响应于识别到作业环境图像中的第二目标位姿标识,控制举升臂移动到第二目标位姿标识对应的第二目标位姿进行作业。上述方案,能够提升机器人作业精度。
技术研发人员:黄玮平,胡鲲,卢维
受保护的技术使用者:浙江华睿科技股份有限公司
技术研发日:
技术公布日:2024/3/5
- 还没有人留言评论。精彩留言会获得点赞!