机械臂碰撞检测方法、装置、计算机设备和存储介质与流程
本申请涉及医疗设备,特别是涉及一种机械臂碰撞检测方法、装置、计算机设备和存储介质。
背景技术:
1、随着科学技术的发展,智能机器人、多机械臂型医疗手术机器人被广泛应用至医疗技术领域。例如,将多机械臂型医疗手术机器人应用在多种类型的手术场景下。在手术过程中,为保证手术正常进行,应尽量规避多机械臂碰撞的问题。
2、现有技术中,一般通过干涉检测实现多机械臂的碰撞规避,即,在机械臂发生干涉的情况下,及时对机械臂的位置进行修正,避免进一步的干涉碰撞。
3、显然,上述现有技术仍难以很好的规避多机械臂碰撞的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够规避多机械臂碰撞的机械臂碰撞检测方法、装置、计算机设备和存储介质。
2、第一方面,提供一种机械臂摆位优化方法,该方法包括:
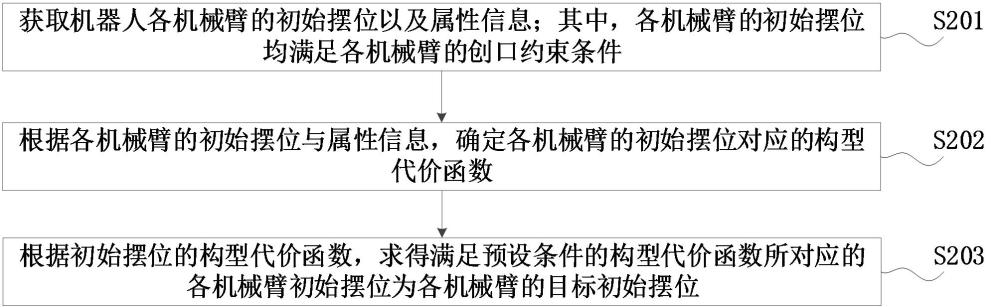
3、获取机器人各机械臂的初始摆位以及属性信息;
4、其中,各机械臂的初始摆位均满足各机械臂的创口约束条件;
5、根据各机械臂的初始摆位与属性信息,确定各机械臂的初始摆位对应的构型代价函数;
6、根据初始摆位的构型代价函数,求得满足预设条件的构型代价函数所对应的各机械臂初始摆位为各机械臂的目标初始摆位。
7、在其中一个实施例中,上述根据各机械臂的初始摆位与属性信息,确定各机械臂的初始摆位对应的构型代价函数包括:
8、根据机械臂的初始摆位与属性信息确定机械臂的至少一个运动关节特征点,确定相邻机械臂各运动关节特征点的距离;
9、根据各机械臂的初始摆位下,相邻机械臂各运动关节特征点的距离、预设的各机械臂运动关节权重,确定初始摆位的构型代价函数。
10、在其中一个实施例中,上述运动关节特征点的选取为连杆模型中心、连杆重心、连杆质心、连杆包围盒中心、连杆末端最远点或关节旋转中心。
11、在其中一个实施例中,上述运动关节权重可以根据运动关节所对应的连杆级数、连杆距离病人距离、连杆体积大小和、连杆累计自由度中的一种或组合确定。
12、在其中一个实施例中,上述根据初始摆位的构型代价函数,求得满足预设条件的构型代价函数所对应的各机械臂初始摆位为各机械臂的目标初始摆位,包括:
13、计算初始摆位的构型代价函数的第一值;
14、根据第一值执行迭代操作,直到第一值满足迭代条件,则确定初始摆位为目标初始摆位。
15、在其中一个实施例中,上述根据第一值执行迭代操作,直到第一值满足迭代条件,则确定初始摆位为目标初始摆位,包括:
16、根据第一值和预设的差值矩阵,确定下一个摆位及其构型代价函数;差值矩阵根据创口约束条件确定;
17、若下一个摆位的构型代价函数的第一值不满足迭代条件,则将下一个摆位的构型代价函数的第一值作为输入,返回执行迭代操作;
18、若下一个摆位的构型代价函数的第一值满足迭代条件,则将下一个摆位确定为目标初始摆位。
19、在其中一个实施例中,上述迭代条件包括下一个摆位的构型代价函数的第一值与初始摆位的构型代价函数的第一值之间的差值处于预设的差值范围内,和/或,下一个摆位的构型代价函数的第一值与预设标准值之间的差值处于差值范围内。
20、在其中一个实施例中,上述初始摆位包括各机械臂在所有情况下的多个初始摆位;根据初始摆位的构型代价函数,求得满足预设条件的构型代价函数所对应的各所述机械臂初始摆位为各机械臂的目标初始摆位,还包括:
21、获取多个初始摆位对应的构型代价函数;
22、遍历计算各初始摆位对应的构型代价函数的第一值;
23、将第一值最大的构型代价函数所对应的初始摆位,确定为目标初始摆位。
24、第二方面,提供一种机械臂摆位优化装置,该装置包括:
25、获取模块,用于获取机器人各机械臂的初始摆位以及属性信息;其中,各机械臂的初始摆位均满足各机械臂的创口约束条件;
26、第一确定模块,用于根据各机械臂的初始摆位与属性信息,确定各机械臂的初始摆位对应的构型代价函数;
27、第二确定模块,用于根据初始摆位的构型代价函数,求得满足预设条件的构型代价函数所对应的各机械臂初始摆位为各机械臂的目标初始摆位。
28、第三方面,提供一种计算机设备,包括存储器和处理器,该存储器存储有计算机程序,该处理器执行该计算机程序时实现上述第一方面任一所述的机械臂摆位优化方法。
29、第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述第一方面任一所述的机械臂摆位优化方法。
30、上述机械臂碰撞检测方法、装置、计算机设备和存储介质,处理器获取机器人各机械臂的初始摆位以及属性信息,根据各机械臂的初始摆位与属性信息,确定各机械臂的初始摆位对应的构型代价函数,据初始摆位的构型代价函数,求得满足预设条件的构型代价函数所对应的各机械臂初始摆位为各机械臂的目标初始摆位。其中,各机械臂的初始摆位均满足各机械臂的创口约束条件。在本方案中,处理器可以根据各机械臂的初始摆位以及属性信息,确定初始摆位的构型代价函数,并基于构型代价函数进行初始摆位的优化计算,得到符合优化目标以及约束条件的目标初始摆位,基于目标初始摆位,后续机械臂运动规划时,各机械臂拥有更大的运动规划空间,减少了各机械臂之间相互碰撞的概率,有效地避免各机械臂在手术过程中发生碰撞的情况,并且,初始摆位与目标初始摆位均满足预设的创口约束条件,确保碰撞检测过程中的各机械臂的位姿状态满足手术器械处于同一个创口点不改变,避免了病人手术时创口扩大的问题。
技术特征:
1.一种机械臂碰撞检测方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取机器人各机械臂的初始摆位对应的构型代价函数,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据各所述机械臂的初始摆位,确定各所述机械臂的至少一个运动关节特征点,包括:
4.根据权利要求2或3所述的方法,其特征在于,所述运动关节特征点包括所述机械臂的连杆模型中心、连杆重心、连杆质心、连杆包围盒中心、连杆末端最远点或关节旋转中心。
5.根据权利要求2或3所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1-3任一项所述的方法,其特征在于,所述构型代价函数包括所述初始摆位下两两相邻机械臂的构型代价函数。
7.根据权利要求1-3任一项所述的方法,其特征在于,所述初始摆位包括各机械臂在所有情况下的多个初始摆位;所述根据所述初始摆位对应的构型代价函数,确定各所述机械臂的目标初始摆位,包括:
8.根据权利要求1-3任一项所述的方法,其特征在于,所述检测模式包括机械臂自碰撞检测,所述根据所述目标初始摆位中各所述机械臂的空间位姿和预设的检测模式,对各所述机械臂进行碰撞检测,输出碰撞检测结果,包括:
9.根据权利要求1-3任一项所述的方法,其特征在于,所述检测模式包括机械臂与环境碰撞检测,所述根据所述目标初始摆位中各所述机械臂的空间位姿和预设的检测模式,对各所述机械臂进行碰撞检测,输出碰撞检测结果,包括:
10.根据权利要求1-3任一项所述的方法,其特征在于,所述检测模式包括机械臂与机械臂之间的碰撞检测,所述根据所述目标初始摆位中各所述机械臂的空间位姿和预设的检测模式,对各所述机械臂进行碰撞检测,输出碰撞检测结果,包括:
11.一种机械臂碰撞检测装置,其特征在于,所述装置包括:
12.根据权利要求11所述的装置,其特征在于,获取模块包括:
13.根据权利要求12所述的装置,其特征在于,所述第一确定单元,包括:
14.根据权利要求12或13所述的装置,其特征在于,所述运动关节特征点包括所述机械臂的连杆模型中心、连杆重心、连杆质心、连杆包围盒中心、连杆末端最远点或关节旋转中心。
15.根据权利要求12或13所述的装置,其特征在于,所述装置还用于针对任一机械臂,根据所述机械臂中运动关节所对应的连杆级数、连杆距离病人距离、连杆体积、连杆累计自由度中的至少一种,确定所述机械臂的运动关节权重。
16.根据权利要求11-13任一项所述的装置,其特征在于,所述构型代价函数包括所述初始摆位下两两相邻机械臂的构型代价函数。
17.根据权利要求11-13任一项所述的装置,其特征在于,所述初始摆位包括各机械臂在所有情况下的多个初始摆位;所述确定模块包括:
18.根据权利要求11-13任一项所述的装置,其特征在于,所述检测模式包括机械臂自碰撞检测,所述检测模块包括:
19.根据权利要求11-13任一项所述的装置,其特征在于,所述检测模式包括机械臂与环境碰撞检测,所述检测模块包括:
20.根据权利要求11-13任一项所述的装置,其特征在于,所述检测模式包括机械臂与机械臂之间的碰撞检测,所述检测模块包括:
21.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至10中任一项所述的方法的步骤。
22.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至10中任一项所述的方法的步骤。
技术总结
本申请涉及一种机械臂碰撞检测方法、装置、计算机设备和存储介质。该方法包括:处理器获取机器人各机械臂的初始摆位以及属性信息,根据各机械臂的初始摆位与属性信息,确定各机械臂的初始摆位对应的构型代价函数,据初始摆位的构型代价函数,求得满足预设条件的构型代价函数所对应的各机械臂初始摆位为各机械臂的目标初始摆位。其中,各机械臂的初始摆位均满足各机械臂的创口约束条件。在本方案中,处理器得到符合优化目标以及约束条件的目标初始摆位,基于目标初始摆位,后续机械臂运动规划时,各机械臂拥有更大的运动规划空间,减少了各机械臂之间相互碰撞的概率,有效地避免各机械臂在手术过程中发生碰撞的情况。
技术研发人员:虞苏璞,张阳,谢强
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!