一种可拟态的侦察机器人
本发明涉及一种可拟态的侦察机器人。
背景技术:
1、当前小型侦察或者巡检机器人发展已比较成熟,但是其隐身特性考虑较少。在视觉层面的隐身上,现今小型侦察机器人由于体积小,雷达难以探测,因此大多数采用颜色喷涂技术或者使用吸波材料。但是机器人工作时会产生热量,其红外辐射很容易使探测器区分机器人和周围环境。
2、因此我们提出了一种新型的可以在视觉上实现拟态的和温度上模仿环境以实现可见光范围内和红外辐射层面的隐身的小型侦察探测机器人。
技术实现思路
1、针对现有技术的不足,本发明旨在提供一种可拟态的侦察机器人,通过拟态功能系统和变色液晶温度控制系统,机器人成功实现其外壳顶部和侧壁的拟态功能,实现在肉眼上和红外辐射层面的隐身功能。
2、本发明通过如下技术方案实现。
3、一种可拟态的侦察机器人,包括外壳、轮子、主控板、底层驱动板、拟态功能系统、变色液晶温度控制系统,所述轮子安装于外壳两侧,主控板控制底层驱动板驱动轮子滚动使机器人行走,拟态功能系统和变色液晶温度控制系统均与主控板电连接;
4、拟态功能系统包括彩色电子墨水屏幕、光学相机、双目相机,彩色电子墨水屏幕覆盖外壳的顶部,光学相机和双目相机安装于外壳的前部,彩色电子墨水屏幕、光学相机和双目相机均与主控板电连接,光学相机和双目相机通过摄取机器人地面的信息,采集颜色信号传至主控板,主控板处理信号控制彩色电子墨水屏幕呈现与环境相似的颜色;
5、变色液晶温度控制系统包括具有空腔的空气循环散热器、两个排热风扇、半导体制冷片、温度传感器,空气循环散热器内嵌贴合在外壳内侧,空气循环散热器主要由侧壁空腔、前侧壁空腔和后侧壁空腔相互连接而成,两个对称分布的排热风扇与后侧壁空腔的扁平的出口处连接,半导体制冷片贴合在外壳上,排热风扇、半导体制冷片、温度传感器均与主控板电连接,温度传感器感知环境温度后将信号传至主控板,主控板控制半导体制冷片、排热风扇的工作状态。
6、进一步,彩色电子墨水屏幕有三个,三个彩色电子墨水屏幕并联,都直接受到主控板的控制。
7、进一步,半导体制冷片有八块,外壳的前部、后部、两个侧部分别贴合两块。
8、进一步,所述变色液晶温度控制系统还包括铜箔、液晶贴片,半导体制冷片与铜箔贴合,铜箔与液晶贴片贴合。
9、进一步,还包括运动系统,轮子有六个,每个轮子配置一套运动系统,所述运动系统包括电机、联轴器、l型支架,电机通过l型支架与外壳连接,电机通过联轴器与轮子连接,电机与底层驱动板电连接,受主控板和底层驱动板控制。
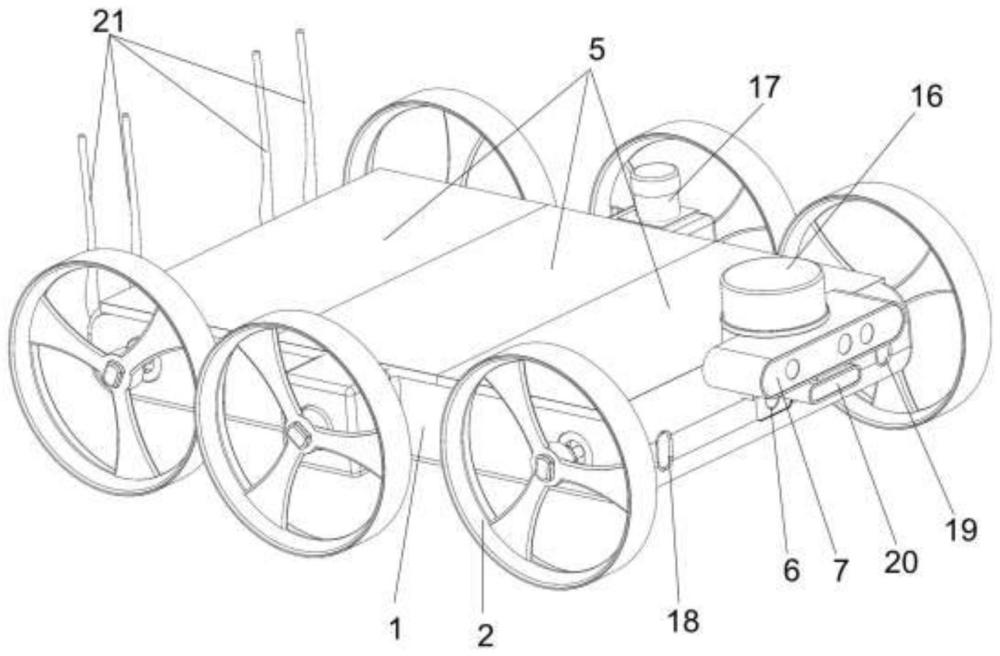
10、进一步,还包括智能规划系统,智能规划系统包括双目相机、激光雷达、航空插头、右探照灯、左探照灯、相机固定组件以及主控板上的5g模组和信号天线,所述激光雷达、航空插头、右探照灯、左探照灯安装在外壳上,所述双目相机通过相机固定组件安装在外壳上。
11、与现有技术相比,本发明的优点是:
12、1、借助彩色电子墨水屏幕呈现图像信息实现机器人的拟态功能,功耗低,延长了机器人隐身系统运行的时间。同时彩色电子墨水屏幕作为隐身载体,其本身是不发光的,且工作时相对于lcd屏幕产热小,在红外辐射层面上更具有隐身性。这对于机器人视觉层面的隐身具有很大优势。
13、2、空气循环散热器采用腔体式的布局内嵌贴合在外壳内侧,充分贴合外壳的表面,这能够更容易控制外壳的整体温度。而且相对于成熟的液冷式散热,空气循环散热器不仅能够散热,而且能够通过控制空气流动为机器人制冷提供帮助,使得热量在外壳表面更加均匀,进一步使液晶变色更加均匀,隐身效果更强。
14、3、三明治夹层式的变色液晶温度控制系统可以实现光学和红外辐射层面的隐身功能,并且具有可移植性,因为铜箔和液晶贴片可以裁剪和为柔性的材料,可以适应多种不同表面。
15、4、运动系统采用步进电机驱动的六轮设计,每一个轮子都是主动轮,使得机器人的机动性更强。
技术特征:
1.一种可拟态的侦察机器人,其特征在于,包括外壳(1)、轮子(2)、主控板(3)、底层驱动板(4)、拟态功能系统、变色液晶温度控制系统,所述轮子(2)安装于外壳(1)两侧,主控板(3)控制底层驱动板(4)驱动轮子(2)滚动使机器人行走,拟态功能系统和变色液晶温度控制系统均与主控板(3)电连接;
2.根据权利要求1所述的一种可拟态的侦察机器人,其特征在于,彩色电子墨水屏幕(5)有三个,三个彩色电子墨水屏幕(5)并联,都直接受到主控板(3)的控制。
3.根据权利要求1所述的一种可拟态的侦察机器人,其特征在于,半导体制冷片(10)有八块,外壳(1)的前部、后部、两个侧部分别贴合两块。
4.根据权利要求1所述的一种可拟态的侦察机器人,其特征在于,所述变色液晶温度控制系统还包括铜箔(11)、液晶贴片(12),半导体制冷片(10)与铜箔(11)贴合,铜箔(11)与液晶贴片(12)贴合。
5.根据权利要求1所述的一种可拟态的侦察机器人,其特征在于,还包括运动系统,轮子(2)有六个,每个轮子(2)配置一套运动系统,所述运动系统包括电机(13)、联轴器(14)、l型支架(15),电机(13)通过l型支架(15)与外壳(1)连接,电机(13)通过联轴器(14)与轮子(2)连接,电机(13)与底层驱动板(4)电连接,受主控板(3)和底层驱动板(4)控制。
6.根据权利要求1所述的一种可拟态的侦察机器人,其特征在于,还包括智能规划系统,智能规划系统包括双目相机(7)、激光雷达(16)、航空插头(17)、右探照灯(18)、左探照灯(19)、相机固定组件(20)以及主控板(3)上的5g模组和信号天线(21),所述激光雷达(16)、航空插头(17)、右探照灯(18)、左探照灯(19)安装在外壳上,所述双目相机(7)通过相机固定组件(20)安装在外壳(1)上。
技术总结
本发明涉及一种可拟态的侦察机器人,包括外壳、轮子、主控板、底层驱动板、拟态功能系统、变色液晶温度控制系统,所述轮子安装于外壳两侧,主控板控制底层驱动板驱动轮子滚动使机器人行走,拟态功能系统和变色液晶温度控制系统均与主控板电连接。本发明通过拟态功能系统和变色液晶温度控制系统,机器人成功实现其外壳顶部和侧壁的拟态功能,实现在肉眼上和红外辐射层面的隐身功能。
技术研发人员:李志杰,周志坛,卓云东,曾雷,田宜昊,熊文婷,周文雄,胥珍珍,易雨轩,郭昊霖,焦允则,王熙文,周莎,万青,辛翔宇
受保护的技术使用者:南昌航空大学
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!